Potrebbero piacerti anche
- Control Pediatrico Nuevo 2018Documento60 pagineControl Pediatrico Nuevo 2018Lorena FigueroaNessuna valutazione finora
- Derechos de Participación en El Plan Financiero Año 2021 CNSC PDFDocumento1 paginaDerechos de Participación en El Plan Financiero Año 2021 CNSC PDFEdilma PerNessuna valutazione finora
- Estructura y Funciones de La Administracion de La JusticiaDocumento16 pagineEstructura y Funciones de La Administracion de La JusticiaNestor MajinNessuna valutazione finora
- Filosofía Colombia PDFDocumento202 pagineFilosofía Colombia PDFEdilma Per100% (1)
- Logica Formal y Logica DialecticaDocumento27 pagineLogica Formal y Logica DialecticaPeluda irredentaNessuna valutazione finora
- Antecedentes de La ViolenciaDocumento42 pagineAntecedentes de La ViolenciaEdilma PerNessuna valutazione finora
- David HIlbert y El FormalismoDocumento6 pagineDavid HIlbert y El FormalismoWilliam BenabuenNessuna valutazione finora
- Los Tres Principios de La Lógica AristotélicaDocumento7 pagineLos Tres Principios de La Lógica AristotélicaJavier B. Seoane C.Nessuna valutazione finora
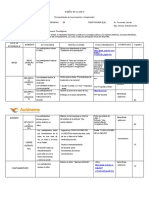
- Diseño de Clase 3Documento2 pagineDiseño de Clase 3Fernando LamasNessuna valutazione finora
- Enfermo - Enfermedad: Medicina Humana - X Ciclo Clase #11 Marco Serrano García Médico PsiquiatraDocumento28 pagineEnfermo - Enfermedad: Medicina Humana - X Ciclo Clase #11 Marco Serrano García Médico PsiquiatraFernando CáceresNessuna valutazione finora
- Mapa Mental Psicopatologia Del AprendizajeDocumento2 pagineMapa Mental Psicopatologia Del Aprendizajexiomara taboraNessuna valutazione finora
- Agua MetabolicaDocumento3 pagineAgua MetabolicaFernanda FersNessuna valutazione finora
- Puesta de Funcionamiento Del Proceso Haccp en La Produccion Del Vino de UvaDocumento22 paginePuesta de Funcionamiento Del Proceso Haccp en La Produccion Del Vino de UvaMallerlin Basto ContrerasNessuna valutazione finora
- Enfermedades Bacterianas Porcinos CompletoDocumento37 pagineEnfermedades Bacterianas Porcinos Completoangie marcela chimbi cordobaNessuna valutazione finora
- Pets - RTS - Instalacion Generador Hidfraulico Rev2Documento22 paginePets - RTS - Instalacion Generador Hidfraulico Rev2Omar turco curiNessuna valutazione finora
- La Tomografía Computarizada de Alta ResoluciónDocumento3 pagineLa Tomografía Computarizada de Alta Resoluciónjalex_val33% (3)
- Procedimiento Orden y LimpiezaDocumento5 pagineProcedimiento Orden y LimpiezaOficina Molymet A33Nessuna valutazione finora
- Formulario de Reclamacin de Seguro ChubbDocumento4 pagineFormulario de Reclamacin de Seguro ChubbJORGENessuna valutazione finora
- Decreto Supremo #086-2021-EFDocumento3 pagineDecreto Supremo #086-2021-EFDiario Oficial El PeruanoNessuna valutazione finora
- Parámetros Cefalométricos para Determinar Biotipo Facial en Adultos ChilenosDocumento8 pagineParámetros Cefalométricos para Determinar Biotipo Facial en Adultos ChilenosjhoselinNessuna valutazione finora
- Anestesiologia: Clase #1Documento14 pagineAnestesiologia: Clase #1Adriana Castillo AparicioNessuna valutazione finora
- Sesión 02 - Psicopatología de La ConcienciaDocumento36 pagineSesión 02 - Psicopatología de La ConcienciaDianaAspiazuLunaNessuna valutazione finora
- Tarea 2Documento5 pagineTarea 2maria alejandra vernaza diazNessuna valutazione finora
- TA 2021 Instrucciones para Desarrollar El Trabajo de AplicaciónDocumento4 pagineTA 2021 Instrucciones para Desarrollar El Trabajo de AplicaciónMiguel Saucedo EspinozaNessuna valutazione finora
- Aparato reproductor femeninoDocumento31 pagineAparato reproductor femeninoPame EV100% (1)
- Ficha Seguridad GASOLINADocumento4 pagineFicha Seguridad GASOLINAJaimeSaAcNessuna valutazione finora
- Tabla Pensiones 2023Documento1 paginaTabla Pensiones 2023antonio perezNessuna valutazione finora
- Prevención de riesgos laborales: legislación y organizaciónDocumento9 paginePrevención de riesgos laborales: legislación y organizaciónInes ParadaNessuna valutazione finora
- Documento Seminario RealDocumento41 pagineDocumento Seminario RealdenysNessuna valutazione finora
- Pae NuevooDocumento16 paginePae NuevooJERONIMA VALVERDE Y DAMACENONessuna valutazione finora
- Aguas Servidas Tacna - Erick - Impacto AmbientalDocumento30 pagineAguas Servidas Tacna - Erick - Impacto Ambientalエリック ジョンNessuna valutazione finora
- Pigmentación RacialDocumento7 paginePigmentación Racialch0c023100% (4)
- El Poder Del PensamientoDocumento3 pagineEl Poder Del PensamientoLissette UzcangaNessuna valutazione finora
- To - PDF Residencia Prov. Bs AsDocumento51 pagineTo - PDF Residencia Prov. Bs AsLiliana CymmermanNessuna valutazione finora
- Ensayo Gerencia de Si MismoDocumento7 pagineEnsayo Gerencia de Si MismoYULIANA SULEY QUINTONessuna valutazione finora
- Procedimiento para La Elaboracion de Mapas de Riesgo de La InstitucionDocumento11 pagineProcedimiento para La Elaboracion de Mapas de Riesgo de La InstitucionNatanael LibradoNessuna valutazione finora
- Informe de Proyecto-La Siembra de ArbolesDocumento18 pagineInforme de Proyecto-La Siembra de ArbolesMelissa Vanessa Cochaches BolimboNessuna valutazione finora