Potrebbero piacerti anche
- Termo King SDDocumento178 pagineTermo King SDDanny Cadena100% (4)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Basic Principles of Distance ProtectionDocumento21 pagineBasic Principles of Distance Protectionsabill arasyid0% (1)
- Power, Testing, and Grounding of Electronic SystemsDa EverandPower, Testing, and Grounding of Electronic SystemsNessuna valutazione finora
- Fundamentals of Transformer ProtectionDocumento37 pagineFundamentals of Transformer ProtectionVikas Oza100% (1)
- PSP TutorialDocumento16 paginePSP TutorialMatthew WongNessuna valutazione finora
- Practical Troubleshooting of Electrical Equipment and Control CircuitsDa EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsValutazione: 4 su 5 stelle4/5 (5)
- Capacitor Bank Switching TransientsDocumento8 pagineCapacitor Bank Switching TransientsaramirezbenitesNessuna valutazione finora
- Ferro ResonanceDocumento29 pagineFerro ResonancementongNessuna valutazione finora
- The Short Line and Kilometric Fault:: Unit V Transients in Integrated Power SystemDocumento22 pagineThe Short Line and Kilometric Fault:: Unit V Transients in Integrated Power SystemJain Marshel B100% (1)
- Ieee 957Documento77 pagineIeee 957ManuelNessuna valutazione finora
- Electric Power Transmission: Lecture Notes of Electric Power Transmission CourseDa EverandElectric Power Transmission: Lecture Notes of Electric Power Transmission CourseValutazione: 5 su 5 stelle5/5 (1)
- Vacuum Circuit Breaker Model PDFDocumento6 pagineVacuum Circuit Breaker Model PDFGovernmentHookerNessuna valutazione finora
- Circuit Breakers 3 PDFDocumento195 pagineCircuit Breakers 3 PDFRonald ManyadzaNessuna valutazione finora
- Fuseng Air CompressorDocumento48 pagineFuseng Air Compressordeni subandi75% (4)
- REF ProtectionDocumento6 pagineREF ProtectionAshok KumarNessuna valutazione finora
- Directional OverDocumento28 pagineDirectional OverEdinson Milton Gaona BarbozaNessuna valutazione finora
- Rja-Phasor Diagrams IiDocumento20 pagineRja-Phasor Diagrams IiZaks MoreNessuna valutazione finora
- Introduction to Power System ProtectionDa EverandIntroduction to Power System ProtectionNessuna valutazione finora
- Power Systems MCQDocumento19 paginePower Systems MCQsalman bhatti100% (1)
- Test Procedure of Surge ArresterDocumento6 pagineTest Procedure of Surge Arrestersmi1989100% (3)
- PSP Tutorial 4-5Documento16 paginePSP Tutorial 4-5flyzalNessuna valutazione finora
- OC EF RLY SET Chap9-122-151Documento30 pagineOC EF RLY SET Chap9-122-151Falulus SalamNessuna valutazione finora
- Power Cable StandardsDocumento3 paginePower Cable StandardsJamie 'Bear' ReaderNessuna valutazione finora
- Nuclear Medicine Therapy: Side Effects and Complications Luca GiovanellaDocumento124 pagineNuclear Medicine Therapy: Side Effects and Complications Luca GiovanellaWhite HeartNessuna valutazione finora
- Broken Conductor Protection PDFDocumento4 pagineBroken Conductor Protection PDFRandhir KumarNessuna valutazione finora
- Chapter Three: Fault Study, Analysis and Short Circuit CalculationsDocumento23 pagineChapter Three: Fault Study, Analysis and Short Circuit Calculationsmuaz_aminu1422Nessuna valutazione finora
- ITMF 2013 07 2 Predl ENUDocumento8 pagineITMF 2013 07 2 Predl ENUbcqbaoNessuna valutazione finora
- Final PPT For BhelDocumento16 pagineFinal PPT For BhelChandni Sharma0% (1)
- Radioactivity - PDFDocumento8 pagineRadioactivity - PDFWhite Heart100% (2)
- Introduction to Power System ProtectionDa EverandIntroduction to Power System ProtectionValutazione: 5 su 5 stelle5/5 (1)
- Overcurrent Relaying For Feeder ProtectionDocumento20 pagineOvercurrent Relaying For Feeder ProtectionVinodNessuna valutazione finora
- 9. SEQUENCE IMPEDANCES OF 3-Φ TRANSFORMERDocumento4 pagine9. SEQUENCE IMPEDANCES OF 3-Φ TRANSFORMERBhanu100% (1)
- Cigre 204Documento17 pagineCigre 204edwinoria100% (2)
- Ewd Instruction 20710990Documento56 pagineEwd Instruction 20710990Anie Ekpenyong100% (3)
- 220kV GIS Installation and Testing ProcedureDocumento87 pagine220kV GIS Installation and Testing ProcedureSelvaraj Vaithilingam69% (16)
- Why A Shunt Reacto-DubaiDocumento27 pagineWhy A Shunt Reacto-DubaiWhite HeartNessuna valutazione finora
- Ground Fault Protection OverviewDocumento34 pagineGround Fault Protection OverviewModisa TsamaaseNessuna valutazione finora
- BS en 61730 1 2007 Photo Voltaic PV Module Safety Qualification Part 1 Requirements For ConstructionDocumento22 pagineBS en 61730 1 2007 Photo Voltaic PV Module Safety Qualification Part 1 Requirements For ConstructionNarges FallahNessuna valutazione finora
- Saso Ieee C57 2018 e PDFDocumento81 pagineSaso Ieee C57 2018 e PDFyhleeNessuna valutazione finora
- BS EN 50483-4. For IPC PDFDocumento54 pagineBS EN 50483-4. For IPC PDFtiến lêNessuna valutazione finora
- Clearance Creepage Distance in Electrical EquipmentDocumento5 pagineClearance Creepage Distance in Electrical EquipmentNghiemNessuna valutazione finora
- Distance Protection of Series-Compensated Lines Problems and SolutionsDocumento36 pagineDistance Protection of Series-Compensated Lines Problems and SolutionsfreddyriveraNessuna valutazione finora
- Fenomeno Ferrorisonanza (Eng)Documento29 pagineFenomeno Ferrorisonanza (Eng)AlbertoNessuna valutazione finora
- Power-System Protection PDFDocumento22 paginePower-System Protection PDFSyafrizal SyafrizalNessuna valutazione finora
- 00296256Documento9 pagine00296256lamugre20003506Nessuna valutazione finora
- Transient Performance and Stability Analysis of Grid Connected Power SystemDocumento24 pagineTransient Performance and Stability Analysis of Grid Connected Power SystemSarat Kumar SahooNessuna valutazione finora
- SGP Ques AnsDocumento24 pagineSGP Ques AnsSoumajit PoddarNessuna valutazione finora
- ELEC4611-24 Exp 1Documento10 pagineELEC4611-24 Exp 1qumg3hsNessuna valutazione finora
- Oscillograph RecordsDocumento12 pagineOscillograph RecordsRio Marthin TambunanNessuna valutazione finora
- CIRED2011 0644 FinalDocumento4 pagineCIRED2011 0644 FinalIsnam JukicNessuna valutazione finora
- ELE4804 Project Part II Name University DateDocumento6 pagineELE4804 Project Part II Name University DateRosalie BachillerNessuna valutazione finora
- PSA - Lecture 6 - Symmetrical Fault Analysis (Part-1) - MAZSDocumento45 paginePSA - Lecture 6 - Symmetrical Fault Analysis (Part-1) - MAZSAsikur Hasan SaumikNessuna valutazione finora
- Application of Reclosing Scheme in Capacitor BankDocumento6 pagineApplication of Reclosing Scheme in Capacitor BankBasim Al-AttarNessuna valutazione finora
- Er Bled 98Documento5 pagineEr Bled 98vuphanhuanNessuna valutazione finora
- Lec5 Transformer ProtectionDocumento48 pagineLec5 Transformer ProtectionEVTNessuna valutazione finora
- Vollet 2007Documento7 pagineVollet 2007RorrachoNessuna valutazione finora
- Power System ProtectionDocumento4 paginePower System Protectionmarinjay03Nessuna valutazione finora
- Chapter 7 Directional OcDocumento10 pagineChapter 7 Directional OcTana AzeezNessuna valutazione finora
- Lecture 2 Version 1 EEE 471 Switchgear and Protection - NMKHANDocumento12 pagineLecture 2 Version 1 EEE 471 Switchgear and Protection - NMKHANMortuzaNessuna valutazione finora
- Impact of Distributed Generation On The Overcurrent Protection Scheme For Radial FeedersDocumento21 pagineImpact of Distributed Generation On The Overcurrent Protection Scheme For Radial FeedersTanveer Ul HaqNessuna valutazione finora
- INSTRUMNT AssignmentDocumento7 pagineINSTRUMNT AssignmentShahab HassanNessuna valutazione finora
- Ferroresonance and Its CausesDocumento10 pagineFerroresonance and Its CauseselectrificatorbbbNessuna valutazione finora
- Supriyanto - English VersionDocumento9 pagineSupriyanto - English VersionSupriyantoNessuna valutazione finora
- Get in Step With SynchronizationDocumento13 pagineGet in Step With SynchronizationQuang BảoNessuna valutazione finora
- III B.Tech II Semester II Mid Question Bank 2017-18: Malla Reddy Engineering College (Autonomous)Documento15 pagineIII B.Tech II Semester II Mid Question Bank 2017-18: Malla Reddy Engineering College (Autonomous)vamshiNessuna valutazione finora
- Polyphase Circuits: Three-Phase Supply A Three-Phase Supply Is Generated When Three Coils Are Placed 120°Documento8 paginePolyphase Circuits: Three-Phase Supply A Three-Phase Supply Is Generated When Three Coils Are Placed 120°Ram Mohan Rao MakineniNessuna valutazione finora
- Yongduanxue 2013Documento4 pagineYongduanxue 2013leavemeNessuna valutazione finora
- Lecture 5 Over Current Protection of Transmission LineDocumento12 pagineLecture 5 Over Current Protection of Transmission LineIhtisham uddinNessuna valutazione finora
- EE360 - 3-Phase CircuitsDocumento64 pagineEE360 - 3-Phase Circuitsبدون اسمNessuna valutazione finora
- Assignment - 1Documento2 pagineAssignment - 1Sushil NamoijamNessuna valutazione finora
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesDa EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNessuna valutazione finora
- Chapter Three (Nuclear Models)Documento25 pagineChapter Three (Nuclear Models)White HeartNessuna valutazione finora
- Chapter Five (Interaction of Radiation With Matter)Documento8 pagineChapter Five (Interaction of Radiation With Matter)White HeartNessuna valutazione finora
- Chapter Four (Nuclear Radiation)Documento10 pagineChapter Four (Nuclear Radiation)White HeartNessuna valutazione finora
- Wprs12en Course DetailsDocumento1 paginaWprs12en Course DetailsWhite HeartNessuna valutazione finora
- Chapter Two (Binding Energy)Documento11 pagineChapter Two (Binding Energy)White HeartNessuna valutazione finora
- Nuclear Binding EnergyDocumento7 pagineNuclear Binding EnergyWhite HeartNessuna valutazione finora
- Subject: Overview of Catalytic Reactor DesignDocumento5 pagineSubject: Overview of Catalytic Reactor DesignWhite HeartNessuna valutazione finora
- University of Basrah For Gas and Oil College of Oil and Gas Engineering Department of Chemical and Petroleum Refining EngineeringDocumento1 paginaUniversity of Basrah For Gas and Oil College of Oil and Gas Engineering Department of Chemical and Petroleum Refining EngineeringWhite HeartNessuna valutazione finora
- كورس حمايه ممتعDocumento151 pagineكورس حمايه ممتعWhite HeartNessuna valutazione finora
- وقايه محول شركه ميجرDocumento56 pagineوقايه محول شركه ميجرWhite HeartNessuna valutazione finora
- System-Based Line Protection Testing With Relaysimtest: ObjectivesDocumento1 paginaSystem-Based Line Protection Testing With Relaysimtest: ObjectivesWhite HeartNessuna valutazione finora
- RELAP5 Simulation of CANDU Station Blackout AccideDocumento20 pagineRELAP5 Simulation of CANDU Station Blackout AccideWhite HeartNessuna valutazione finora
- Properties and Occurrence Natural UraniumDocumento6 pagineProperties and Occurrence Natural UraniumWhite HeartNessuna valutazione finora
- معامل القدرةDocumento6 pagineمعامل القدرةMohammed RapieNessuna valutazione finora
- Nuclear Binding EnergyDocumento7 pagineNuclear Binding EnergyWhite HeartNessuna valutazione finora
- Andrew Saha AupeDocumento6 pagineAndrew Saha AupeWhite HeartNessuna valutazione finora
- 2 5201958578100897674 PDFDocumento82 pagine2 5201958578100897674 PDFWhite HeartNessuna valutazione finora
- Lineman's Slang DictionaryDocumento28 pagineLineman's Slang DictionaryWilber SilesNessuna valutazione finora
- Artisan: DefinitiveDocumento370 pagineArtisan: DefinitivebenjaroNessuna valutazione finora
- Grid AIS L3 HYpact 0124 2017 - 02 ENDocumento24 pagineGrid AIS L3 HYpact 0124 2017 - 02 ENThành DanhNessuna valutazione finora
- Voltage Upgrading - An Insulation Coordination Challenge: June 2011Documento9 pagineVoltage Upgrading - An Insulation Coordination Challenge: June 2011ManafNessuna valutazione finora
- RTPPDocumento338 pagineRTPPNaveen ChodagiriNessuna valutazione finora
- Power Trans Fluid 1Documento12 paginePower Trans Fluid 1yetzintlinNessuna valutazione finora
- PDFDocumento3 paginePDFabuNessuna valutazione finora
- 400 KV Hardware Set Drawings-AppendixDocumento10 pagine400 KV Hardware Set Drawings-AppendixtanujaayerNessuna valutazione finora
- NTDC PreprationDocumento16 pagineNTDC PreprationHamza AsifNessuna valutazione finora
- Surge Arrestor GTPDocumento4 pagineSurge Arrestor GTPanoop13Nessuna valutazione finora
- Diagnostic Testing of Underground Cable Systems by NEETRACDocumento323 pagineDiagnostic Testing of Underground Cable Systems by NEETRACAdi WahyuNessuna valutazione finora
- Technical Exam 2QDocumento24 pagineTechnical Exam 2QjesseNessuna valutazione finora
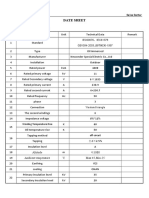
- Data Sheet ZTS-4400KVA 11KV 6x1835V - NSE Co (00000002) PDFDocumento2 pagineData Sheet ZTS-4400KVA 11KV 6x1835V - NSE Co (00000002) PDFsofiene otayNessuna valutazione finora
- ECG Cost DataDocumento153 pagineECG Cost DataRamesh Arjun TNessuna valutazione finora
- NEK606 JScableDocumento40 pagineNEK606 JScablenc_eanNessuna valutazione finora
- Modern Telemetry I To 11Documento480 pagineModern Telemetry I To 11Sugeng PambudiNessuna valutazione finora
- LUCY31067 Product Portfolio - AW - WEBDocumento42 pagineLUCY31067 Product Portfolio - AW - WEBShu Yan CheungNessuna valutazione finora