Potrebbero piacerti anche
- Ee 303 LCS December 2017Documento2 pagineEe 303 LCS December 2017Jerin AntonyNessuna valutazione finora
- B F1032 Pages: 3: Answer All Questions, Each Carries 5 MarksDocumento3 pagineB F1032 Pages: 3: Answer All Questions, Each Carries 5 MarksAfsal Abdul KarimNessuna valutazione finora
- 2020-10-08SupplementaryEE304EE304-F - Ktu QbankDocumento2 pagine2020-10-08SupplementaryEE304EE304-F - Ktu QbankSYED AYANNessuna valutazione finora
- Sankalchand Patel UniversityDocumento3 pagineSankalchand Patel UniversityDivyNessuna valutazione finora
- B.Tech. (VI Semester) PUT Examination Digital Control SystemDocumento3 pagineB.Tech. (VI Semester) PUT Examination Digital Control SystemVikash TiwariNessuna valutazione finora
- Oct-2o17 QPDocumento2 pagineOct-2o17 QPSai Pavan Kumar NandigamNessuna valutazione finora
- 2020-09-18SupplementaryEC409EC409-E - Ktu QbankDocumento3 pagine2020-09-18SupplementaryEC409EC409-E - Ktu QbankArjun S KumarNessuna valutazione finora
- Csmodel 2Documento4 pagineCsmodel 2Anonymous L7XrxpeI1zNessuna valutazione finora
- Ae302 ADocumento2 pagineAe302 ASHINUMMNessuna valutazione finora
- CSS 22531-2023-Summer-Question-Paper EGDocumento4 pagineCSS 22531-2023-Summer-Question-Paper EGrushikarande0024Nessuna valutazione finora
- Branch: Electronics and Communication Engineering Ec010 502-Control SystemsDocumento3 pagineBranch: Electronics and Communication Engineering Ec010 502-Control SystemsMoh OkoeNessuna valutazione finora
- BMS College of Engineering, Bangalore-560019: December 2015 Semester End Main ExaminationsDocumento3 pagineBMS College of Engineering, Bangalore-560019: December 2015 Semester End Main ExaminationsahmadNessuna valutazione finora
- Me010 605 Mechatronics and Control SystemsDocumento3 pagineMe010 605 Mechatronics and Control SystemsSreehari VpNessuna valutazione finora
- Scheme - I Sample Question PaperDocumento4 pagineScheme - I Sample Question PaperYogesh ChaudhariNessuna valutazione finora
- EC409 Control SystemsDocumento12 pagineEC409 Control SystemsSuryakanta PattanaikNessuna valutazione finora
- Answer Any Two Full Questions, Each Carries 15 MarksDocumento3 pagineAnswer Any Two Full Questions, Each Carries 15 MarkskayyurNessuna valutazione finora
- 21 22Documento2 pagine21 22Goura Sundar TripathyNessuna valutazione finora
- 125 Du 112017Documento3 pagine125 Du 112017SANKARA REDDYNessuna valutazione finora
- PTEE7301 April-2021Documento2 paginePTEE7301 April-2021imman46920Nessuna valutazione finora
- 22 23Documento2 pagine22 23Goura Sundar TripathyNessuna valutazione finora
- Dec. EC409-C - Ktu QbankDocumento3 pagineDec. EC409-C - Ktu QbankNISHANT KUMARNessuna valutazione finora
- Question Paper Code:: Reg. No.Documento3 pagineQuestion Paper Code:: Reg. No.HARI DURAINessuna valutazione finora
- EE303 Linear Control Systems, May 2019Documento3 pagineEE303 Linear Control Systems, May 2019Annjo JacksonNessuna valutazione finora
- Gujarat Technological UniversityDocumento4 pagineGujarat Technological UniversityMandy745Nessuna valutazione finora
- EE404 Industrial Instrumentation and Automation: B H192032 Pages: 2Documento2 pagineEE404 Industrial Instrumentation and Automation: B H192032 Pages: 2Rijo MathewNessuna valutazione finora
- CE Model Question Paper 2019 - 16ME72Documento3 pagineCE Model Question Paper 2019 - 16ME72ashitaNessuna valutazione finora
- 2019 Dec. EE303-F - Ktu QbankDocumento3 pagine2019 Dec. EE303-F - Ktu QbankharithaNessuna valutazione finora
- Answer Any Two Full Questions, Each Carries 15 MarksDocumento3 pagineAnswer Any Two Full Questions, Each Carries 15 MarksOlNessuna valutazione finora
- Cse Question Bank Part BDocumento5 pagineCse Question Bank Part Bbalaji1986Nessuna valutazione finora
- 2020-10-20SupplementaryEE307EE307-F - Ktu QbankDocumento2 pagine2020-10-20SupplementaryEE307EE307-F - Ktu QbankAdithya Kumar M SNessuna valutazione finora
- Gujarat Technological UniversityDocumento2 pagineGujarat Technological UniversityNallaNessuna valutazione finora
- Advanced Marine ControlDocumento14 pagineAdvanced Marine ControlNitin ChaurasiaNessuna valutazione finora
- BMS College of Engineering, Bangalore-560019: July / August 2017 Supplementary Semester ExaminationsDocumento3 pagineBMS College of Engineering, Bangalore-560019: July / August 2017 Supplementary Semester Examinationskoushik bhatNessuna valutazione finora
- Control System Question PaperDocumento2 pagineControl System Question PaperKishor GooddayNessuna valutazione finora
- Sankalchand Patel UniversityDocumento2 pagineSankalchand Patel UniversityDivyNessuna valutazione finora
- CCP NotesDocumento101 pagineCCP NoteslvrevathiNessuna valutazione finora
- BMS College of Engineering, Bangalore-560019: May 2016 Semester End Main ExaminationsDocumento3 pagineBMS College of Engineering, Bangalore-560019: May 2016 Semester End Main Examinationskoushik bhatNessuna valutazione finora
- 09-Digital Control SystemsDocumento2 pagine09-Digital Control Systemssudhakar kNessuna valutazione finora
- CSD W-2022Documento2 pagineCSD W-2022Heet PatelNessuna valutazione finora
- Control System Question BankDocumento12 pagineControl System Question BankKarthik NagarajanNessuna valutazione finora
- Gujarat Technological University: Subject Code:2141004 Subject Name:Control System Engineering Time:10:30 AM To 01:00 PMDocumento3 pagineGujarat Technological University: Subject Code:2141004 Subject Name:Control System Engineering Time:10:30 AM To 01:00 PMvisupinuNessuna valutazione finora
- 3 Hours / 70 Marks: Seat NoDocumento4 pagine3 Hours / 70 Marks: Seat Nopranavsonwane500Nessuna valutazione finora
- Gujarat Technological UniversityDocumento3 pagineGujarat Technological Universityfeyayel988Nessuna valutazione finora
- Advanced Control Theory (Eee)Documento3 pagineAdvanced Control Theory (Eee)Adarsh VkNessuna valutazione finora
- Gujarat Technological UniversityDocumento2 pagineGujarat Technological UniversityMORESAGARNessuna valutazione finora
- 115DU122016 JNTUH Exam PapersDocumento2 pagine115DU122016 JNTUH Exam PapersethanNessuna valutazione finora
- 115AD032016Documento2 pagine115AD032016mushahedNessuna valutazione finora
- Control System All QuestionsDocumento3 pagineControl System All QuestionsRehana Karim TomaNessuna valutazione finora
- Parul University: Seat No: - Enrollment NoDocumento2 pagineParul University: Seat No: - Enrollment Noaakash mehtaNessuna valutazione finora
- Met-Met-Met: Seventh Semester B.Tech Degree Examination (Regular and Supplementary), December 2020Documento2 pagineMet-Met-Met: Seventh Semester B.Tech Degree Examination (Regular and Supplementary), December 2020vivekNessuna valutazione finora
- Act - Bank.newformat - Jan6 - 1230Documento10 pagineAct - Bank.newformat - Jan6 - 1230Vijay RajuNessuna valutazione finora
- UG11T2702 Advanced Marine Control Engg & AutomationDocumento3 pagineUG11T2702 Advanced Marine Control Engg & AutomationSrinivasan PrakashNessuna valutazione finora
- F F1166 Pages: 2: Answer Any Two Full Questions, Each Carries 15 MarksDocumento2 pagineF F1166 Pages: 2: Answer Any Two Full Questions, Each Carries 15 MarksAndrew JeromiasNessuna valutazione finora
- Unit IDocumento18 pagineUnit ILAKSHMI SNessuna valutazione finora
- Control Systems and PLC-sample-question-paper (Msbte-Study-Resources)Documento5 pagineControl Systems and PLC-sample-question-paper (Msbte-Study-Resources)shubhampawaskar1313Nessuna valutazione finora
- Gujarat Technological UniversityDocumento2 pagineGujarat Technological UniversityHerat HirparaNessuna valutazione finora
- EEE342Documento3 pagineEEE342krishna135Nessuna valutazione finora
- Design and Implementation of Large-Range Compliant Micropositioning SystemsDa EverandDesign and Implementation of Large-Range Compliant Micropositioning SystemsNessuna valutazione finora
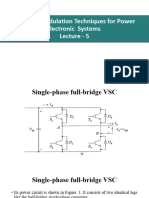
- Lecture 5 - Single Phase Full Bridge VSCDocumento12 pagineLecture 5 - Single Phase Full Bridge VSCAfsal Abdul KarimNessuna valutazione finora
- Lecture 7 - SymmetryDocumento16 pagineLecture 7 - SymmetryAfsal Abdul KarimNessuna valutazione finora
- Lecture 4 - Single Phase Half Bridge VSCDocumento13 pagineLecture 4 - Single Phase Half Bridge VSCAfsal Abdul KarimNessuna valutazione finora
- Advanced Control Theory Module 3 PDFDocumento50 pagineAdvanced Control Theory Module 3 PDFAfsal Abdul KarimNessuna valutazione finora
- 132 2020 KTUUniversityOrderregardinginternaltestsDocumento2 pagine132 2020 KTUUniversityOrderregardinginternaltestsSheen Xavier ANessuna valutazione finora
- Placement CompaniesDocumento3 paginePlacement CompaniesAfsal Abdul KarimNessuna valutazione finora
- EE301 Power Generation, Transmission and Protection, December 2017 PDFDocumento2 pagineEE301 Power Generation, Transmission and Protection, December 2017 PDFAfsal Abdul KarimNessuna valutazione finora
- Summer Internship Notice-2019Documento3 pagineSummer Internship Notice-2019Ritik DewanganNessuna valutazione finora
- EE307 Signals and SystemsDocumento2 pagineEE307 Signals and SystemsbibuthomasNessuna valutazione finora
- Power System AnalysisDocumento90 paginePower System AnalysisAfsal Abdul KarimNessuna valutazione finora
- AdvControl M1 Ktunotes - in - PDFDocumento80 pagineAdvControl M1 Ktunotes - in - PDFShubham YadavNessuna valutazione finora
- Lcs TP SeriesDocumento86 pagineLcs TP SeriesAfsal Abdul KarimNessuna valutazione finora
- Control Systems Engineering - I. J. Nagrath and M. Gopal PDFDocumento81 pagineControl Systems Engineering - I. J. Nagrath and M. Gopal PDFJanardhan GannigaNessuna valutazione finora
- YS1700 Drum Level ControlDocumento2 pagineYS1700 Drum Level ControlIdriss BarçaNessuna valutazione finora
- FBISE Grade 10 Biology Worksheet#1Documento2 pagineFBISE Grade 10 Biology Worksheet#1Moaz AhmedNessuna valutazione finora
- Mufti ReligionMilitancy WebDocumento0 pagineMufti ReligionMilitancy WebAyaz Ahmed KhanNessuna valutazione finora
- Self-Efficacy and Academic Stressors in University StudentsDocumento9 pagineSelf-Efficacy and Academic Stressors in University StudentskskkakleirNessuna valutazione finora
- PTE Writing FormatDocumento8 paginePTE Writing FormatpelizNessuna valutazione finora
- Study of Subsonic Wind Tunnel and Its Calibration: Pratik V. DedhiaDocumento8 pagineStudy of Subsonic Wind Tunnel and Its Calibration: Pratik V. DedhiaPratikDedhia99Nessuna valutazione finora
- Video ObservationDocumento8 pagineVideo Observationapi-532202065Nessuna valutazione finora
- Promotion of Coconut in The Production of YoghurtDocumento4 paginePromotion of Coconut in The Production of YoghurtԱբրենիկա ՖերլինNessuna valutazione finora
- Using Ms-Dos 6.22Documento1.053 pagineUsing Ms-Dos 6.22lorimer78100% (3)
- Rfis On Formliners, Cover, and EmbedmentsDocumento36 pagineRfis On Formliners, Cover, and Embedmentsali tahaNessuna valutazione finora
- Nugent 2010 Chapter 3Documento13 pagineNugent 2010 Chapter 3Ingrid BobosNessuna valutazione finora
- Tushnet - An Essay On RightsDocumento43 pagineTushnet - An Essay On RightslarisamannNessuna valutazione finora
- Comparison of Multi-Coil and Diaphragm Spring ClutchesDocumento3 pagineComparison of Multi-Coil and Diaphragm Spring Clutchesmasb_994077Nessuna valutazione finora
- Paper:Introduction To Economics and Finance: Functions of Economic SystemDocumento10 paginePaper:Introduction To Economics and Finance: Functions of Economic SystemQadirNessuna valutazione finora
- Research in International Business and Finance: Huizheng Liu, Zhe Zong, Kate Hynes, Karolien de Bruyne TDocumento13 pagineResearch in International Business and Finance: Huizheng Liu, Zhe Zong, Kate Hynes, Karolien de Bruyne TDessy ParamitaNessuna valutazione finora
- COACHING TOOLS Mod4 TGOROWDocumento6 pagineCOACHING TOOLS Mod4 TGOROWZoltan GZoltanNessuna valutazione finora
- Excel Lesson 5 QuizDocumento5 pagineExcel Lesson 5 Quizdeep72Nessuna valutazione finora
- 8A L31 Phiếu BTDocumento7 pagine8A L31 Phiếu BTviennhuNessuna valutazione finora
- ASTM D 4437-99 Standard Practice For Determining The Integrity of Fiel Seams Used in Joining Flexible Polymeric Sheet GeomembranesDocumento3 pagineASTM D 4437-99 Standard Practice For Determining The Integrity of Fiel Seams Used in Joining Flexible Polymeric Sheet GeomembranesPablo Antonio Valcárcel Vargas100% (2)
- Sample Paper Book StandardDocumento24 pagineSample Paper Book StandardArpana GuptaNessuna valutazione finora
- Project Report On HeritageDocumento39 pagineProject Report On HeritageBALA YOGESH YANDAMURINessuna valutazione finora
- Data Mining For Business Analyst AssignmentDocumento9 pagineData Mining For Business Analyst AssignmentNageshwar SinghNessuna valutazione finora
- Vmware It Academy Program May2016Documento26 pagineVmware It Academy Program May2016someoneNessuna valutazione finora
- HW Chapter 25 Giancoli Physics - SolutionsDocumento8 pagineHW Chapter 25 Giancoli Physics - SolutionsBecky DominguezNessuna valutazione finora
- 0n9) O6..,w48j-GDocumento14 pagine0n9) O6..,w48j-GMocha FurrerNessuna valutazione finora
- Case Studies InterviewDocumento7 pagineCase Studies Interviewxuyq_richard8867100% (2)
- Invenio Flyer enDocumento2 pagineInvenio Flyer enErcx Hijo de AlgoNessuna valutazione finora
- As I Lay Writing How To Write Law Review ArticleDocumento23 pagineAs I Lay Writing How To Write Law Review ArticleWalter Perez NiñoNessuna valutazione finora
- -4618918اسئلة مدني فحص التخطيط مع الأجوبة من د. طارق الشامي & م. أحمد هنداويDocumento35 pagine-4618918اسئلة مدني فحص التخطيط مع الأجوبة من د. طارق الشامي & م. أحمد هنداويAboalmaail Alamin100% (1)
- First Aid Transportation of The InjuredDocumento30 pagineFirst Aid Transportation of The InjuredMuhammad Naveed Akhtar100% (1)