Potrebbero piacerti anche
- Lect 2 Coordinate SystemsDocumento57 pagineLect 2 Coordinate SystemsBarış DuranNessuna valutazione finora
- 16 FirstOrderLogicDocumento79 pagine16 FirstOrderLogicchoconlilomNessuna valutazione finora
- ADUni - Theory of Computation - Problem Set 01 SolutionsDocumento6 pagineADUni - Theory of Computation - Problem Set 01 SolutionsAjith SureshNessuna valutazione finora
- ADUni - Theory of Computation - Problem Set 01 SolutionsDocumento7 pagineADUni - Theory of Computation - Problem Set 01 Solutionskiet eduNessuna valutazione finora
- Lecture 1Documento2 pagineLecture 1Pratik ChatterjeeNessuna valutazione finora
- ProjectionsDocumento9 pagineProjectionsstrrrweNessuna valutazione finora
- Understanding Euler Angles: Attitude and Heading SensorsDocumento15 pagineUnderstanding Euler Angles: Attitude and Heading SensorsLaura BILIUSNessuna valutazione finora
- Intrinsic CoordinatesDocumento40 pagineIntrinsic CoordinatesSKETCHILY SEBENTE0% (1)
- 53 - 36765 - ME594 - 2014 - 1 - 2 - 1 - Homogeneous TransformationDocumento21 pagine53 - 36765 - ME594 - 2014 - 1 - 2 - 1 - Homogeneous TransformationHariharanNessuna valutazione finora
- Camera ParametersDocumento35 pagineCamera ParametersAbd W Al AnasNessuna valutazione finora
- 3D Transformations & Orientation Parameterization: Advanced Computer Animation Techniques Aug-Dec 2011 Cesteves@cimat - MXDocumento33 pagine3D Transformations & Orientation Parameterization: Advanced Computer Animation Techniques Aug-Dec 2011 Cesteves@cimat - MXArturo Dominguez Esquivel100% (1)
- MM QuestionbankDocumento4 pagineMM QuestionbankPolisetti Sn Bhaskar100% (1)
- Computer Graphics - 3-Dimensional Transformations - Applied To SurveyingDocumento23 pagineComputer Graphics - 3-Dimensional Transformations - Applied To SurveyingSyedkareem_hkgNessuna valutazione finora
- 3d Viewing TransDocumento70 pagine3d Viewing TransSrinath Gm G MNessuna valutazione finora
- Tutorial DiodeDocumento15 pagineTutorial DiodeAravind KumarNessuna valutazione finora
- Graphics 02 Transformations PDFDocumento45 pagineGraphics 02 Transformations PDFfunny videosNessuna valutazione finora
- Finite Automata DFA and NFADocumento8 pagineFinite Automata DFA and NFAChandra Kanth NNessuna valutazione finora
- 2D/3D Geometric Transformations: CS485/685 Computer Vision Dr. George BebisDocumento40 pagine2D/3D Geometric Transformations: CS485/685 Computer Vision Dr. George BebisAmudha SenthilNessuna valutazione finora
- Assignment 3 - Solutions PDFDocumento13 pagineAssignment 3 - Solutions PDFIsrat Noor KaziNessuna valutazione finora
- 03 2D-3D GeometryDocumento77 pagine03 2D-3D GeometryTuseeq RazaNessuna valutazione finora
- Deterministic Finite Automata: COMPSCI 102 Lecture 2Documento34 pagineDeterministic Finite Automata: COMPSCI 102 Lecture 2Neeraja HariNessuna valutazione finora
- Graphics 03 Projections PDFDocumento44 pagineGraphics 03 Projections PDFStudy portalNessuna valutazione finora
- Person Note Document For Multivariable CalculusDocumento2 paginePerson Note Document For Multivariable CalculusImcomingforyouNessuna valutazione finora
- Practice Problems Week 7Documento4 paginePractice Problems Week 7api-479141525Nessuna valutazione finora
- 4) MLR4: Zero Cond Mean E (U - x1,..xk) 0: 2) NO BIAS ConditionDocumento3 pagine4) MLR4: Zero Cond Mean E (U - x1,..xk) 0: 2) NO BIAS ConditionChristopher GianNessuna valutazione finora
- Three-Dimensional TransformationDocumento46 pagineThree-Dimensional Transformationreem goNessuna valutazione finora
- Exercises Chapter1Documento5 pagineExercises Chapter1Albus SeverusNessuna valutazione finora
- Great Theoretical Ideas in Computer ScienceDocumento36 pagineGreat Theoretical Ideas in Computer ScienceV Nageswara VarmaNessuna valutazione finora
- Projection-Computer GraphicsDocumento60 pagineProjection-Computer GraphicsGopal SharmaNessuna valutazione finora
- Ordered Pair:-An Ordered Pair Consist of Two Elements in A Fixed OrderDocumento19 pagineOrdered Pair:-An Ordered Pair Consist of Two Elements in A Fixed OrderDipinNessuna valutazione finora
- BCS 054 Previous Year Question Papers by IgnouassignmentguruDocumento84 pagineBCS 054 Previous Year Question Papers by IgnouassignmentguruÄñkûßh PälNessuna valutazione finora
- Vectors and Tensor Operations in Polar CoordinatesDocumento19 pagineVectors and Tensor Operations in Polar CoordinatesAscanio BarbosaNessuna valutazione finora
- Computer Graphics 3D Display MethodsDocumento5 pagineComputer Graphics 3D Display MethodsSyedkareem_hkgNessuna valutazione finora
- Matrices: Definition. ADocumento5 pagineMatrices: Definition. AKery DzNessuna valutazione finora
- Neural Fingerprint Enhancement: Edward RaffDocumento7 pagineNeural Fingerprint Enhancement: Edward Raffroman_ramosNessuna valutazione finora
- A Star AlgorithmDocumento24 pagineA Star AlgorithmPreeTi KalWarNessuna valutazione finora
- ECE 440 Cheat SheetDocumento2 pagineECE 440 Cheat SheetAdan DubeNessuna valutazione finora
- Non-Positional Number SystemDocumento6 pagineNon-Positional Number SystemhellorosyNessuna valutazione finora
- Lec 5Documento5 pagineLec 5Hawraa HawraaNessuna valutazione finora
- Chapter 4 Polar Coordinate, Polar CurvesDocumento80 pagineChapter 4 Polar Coordinate, Polar CurvesLol KekNessuna valutazione finora
- Polar Equation2Documento39 paginePolar Equation2leepatrickbanezNessuna valutazione finora
- M.M Tripathi Coordinate GeometryDocumento85 pagineM.M Tripathi Coordinate GeometryDivya AgrawalNessuna valutazione finora
- 3-2 Polar CoordinatesDocumento6 pagine3-2 Polar Coordinatesjosh fanNessuna valutazione finora
- 1.calculus III (Math211) - Week 1, 2 & 3Documento65 pagine1.calculus III (Math211) - Week 1, 2 & 3Khaled FaisalNessuna valutazione finora
- 141 10.1 Lecture Notes Polar CordinatesDocumento4 pagine141 10.1 Lecture Notes Polar CordinatesHaroon ShahNessuna valutazione finora
- APPLICATION 1 Area Bounded by CurvesRectangular Polar Coordinates PDFDocumento31 pagineAPPLICATION 1 Area Bounded by CurvesRectangular Polar Coordinates PDFJingWeybzNessuna valutazione finora
- Parametric Equations and Polar CoordinatesDocumento112 pagineParametric Equations and Polar CoordinatesZazliana IzattiNessuna valutazione finora
- Final PPT of Tracing of Polar CurvesDocumento66 pagineFinal PPT of Tracing of Polar CurvesNidhi Rai100% (2)
- 160 11 3 4 PolarCoords AreaArcLengthCOMPLETEDocumento16 pagine160 11 3 4 PolarCoords AreaArcLengthCOMPLETEangggelNessuna valutazione finora
- 9.4 Polar CoordinatesDocumento10 pagine9.4 Polar CoordinatesNadine BadawiyehNessuna valutazione finora
- Chapter 12 PDFDocumento50 pagineChapter 12 PDFNaveen DharavathNessuna valutazione finora
- Point (Theory)Documento13 paginePoint (Theory)Himanshu GuptaNessuna valutazione finora
- 2functions and Planes, Cylindrical and Spherical CoordinatesDocumento101 pagine2functions and Planes, Cylindrical and Spherical CoordinatesUlaş YoldaşNessuna valutazione finora
- Chapter 8-Polar CoordinatesDocumento17 pagineChapter 8-Polar CoordinatesNicholas GawanNessuna valutazione finora
- Polar Coordinates NotesDocumento15 paginePolar Coordinates NotesEnzo OoiNessuna valutazione finora
- 4.2 Polar Coordinates and Polar Graphs PDFDocumento10 pagine4.2 Polar Coordinates and Polar Graphs PDFLarsen Atega AlexanderssonNessuna valutazione finora
- 9 3polarDocumento9 pagine9 3polarZazliana IzattiNessuna valutazione finora
- 9 3polarDocumento9 pagine9 3polarZazliana IzattiNessuna valutazione finora
- 9 3polarDocumento9 pagine9 3polarZazliana IzattiNessuna valutazione finora
- Geometry Lesson 4Documento18 pagineGeometry Lesson 4Joy IbarrientosNessuna valutazione finora
- English 5: Learning Activity Sheet Cause and Effect Relationship Background Information For LearnersDocumento7 pagineEnglish 5: Learning Activity Sheet Cause and Effect Relationship Background Information For LearnersFaye CabauatanNessuna valutazione finora
- TLE - NewDocumento4 pagineTLE - NewFaye CabauatanNessuna valutazione finora
- BASS of Kaybuti Buti MoDocumento21 pagineBASS of Kaybuti Buti MoFaye CabauatanNessuna valutazione finora
- Lecture Notes 8 Other Transcendental FunctionsDocumento8 pagineLecture Notes 8 Other Transcendental FunctionsFaye CabauatanNessuna valutazione finora
- Electromagnetic Field Theory: A Problem Solving ApproachDocumento40 pagineElectromagnetic Field Theory: A Problem Solving ApproachdavidNessuna valutazione finora
- Creating An Implant Library For The 3shape Dental System (v4.0)Documento80 pagineCreating An Implant Library For The 3shape Dental System (v4.0)Goran Prendjov67% (3)
- 149 Vigyan Bhairav Tantra Vol 2Documento5 pagine149 Vigyan Bhairav Tantra Vol 2nadbrahmaNessuna valutazione finora
- Chapter 2 - Aerodynamics - SomeFundamentalPrinciplesandEquationsDocumento29 pagineChapter 2 - Aerodynamics - SomeFundamentalPrinciplesandEquationsChristian NobertoNessuna valutazione finora
- 2 - Volumetric Dip and AzimuthDocumento20 pagine2 - Volumetric Dip and AzimuthSagnik Basu RoyNessuna valutazione finora
- Bauer Ultrasonic Koden enDocumento1 paginaBauer Ultrasonic Koden enTargetRockNessuna valutazione finora
- Lieber, Lillian R. - Infinity. Beyond The Beyond The Beyond (1953) - Rinehart, 1953Documento370 pagineLieber, Lillian R. - Infinity. Beyond The Beyond The Beyond (1953) - Rinehart, 1953Julieta MarchantNessuna valutazione finora
- Past Papers IGCSE 2022 62Documento8 paginePast Papers IGCSE 2022 62David ThydetNessuna valutazione finora
- Math PracticeDocumento5 pagineMath PracticeRehaan BichaNessuna valutazione finora
- Pyx PlotDocumento160 paginePyx PlotRupak BhattacharyaNessuna valutazione finora
- B-64484EN-2 - 02 Fanuc 30,31,32i Operator Manual PDFDocumento452 pagineB-64484EN-2 - 02 Fanuc 30,31,32i Operator Manual PDFRelu Chiru100% (1)
- 02 Robot AnatomyDocumento35 pagine02 Robot AnatomyTonny ThanhNessuna valutazione finora
- Procedia Cirp: Aswin K Ramasubramanian, Nikolaos PapakostasDocumento7 pagineProcedia Cirp: Aswin K Ramasubramanian, Nikolaos PapakostasIoana BiticaNessuna valutazione finora
- Porphyry Copper Deposits of The World: Database, Map, and Grade and Tonnage ModelsDocumento9 paginePorphyry Copper Deposits of The World: Database, Map, and Grade and Tonnage ModelsItalo MelgarNessuna valutazione finora
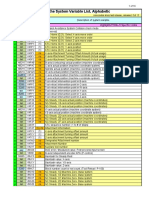
- SystemVarsAlpha List OkumaDocumento16 pagineSystemVarsAlpha List Okumaseb_dominique100% (2)
- Techno GCode Commands PDFDocumento24 pagineTechno GCode Commands PDFdjalikadjouNessuna valutazione finora
- MgO VASP TutorialDocumento16 pagineMgO VASP TutorialKartavya BholaNessuna valutazione finora
- CG Unit 1 5 NotesDocumento173 pagineCG Unit 1 5 Noteskrishnakumar velapanNessuna valutazione finora
- Sec 2 E Math Ang Mo Kio Sec SA2 2018iDocumento33 pagineSec 2 E Math Ang Mo Kio Sec SA2 2018imitran narayananNessuna valutazione finora
- Mathematics IDocumento1 paginaMathematics IYadav MaheshNessuna valutazione finora
- Math 31 IB HL - SL (Area Under Curves) With AnswersDocumento4 pagineMath 31 IB HL - SL (Area Under Curves) With AnswersKabir MehtaNessuna valutazione finora
- Commit Log v1.0bDocumento3 pagineCommit Log v1.0bcory ahumadaNessuna valutazione finora
- Algebra2 5 2 Lesson Curated Practice Problem SetDocumento4 pagineAlgebra2 5 2 Lesson Curated Practice Problem SetBlanca GuzmanNessuna valutazione finora
- Basic Concepts of Symmetry and Group TheoryDocumento26 pagineBasic Concepts of Symmetry and Group TheoryNov IndaNessuna valutazione finora
- F6 DSE08 Exp & Log FunctionsDocumento19 pagineF6 DSE08 Exp & Log Functions5G 11 Lam Hiu Nam Jolie 林曉楠 (21-22)Nessuna valutazione finora
- NMRDocumento24 pagineNMRGulayDilekNessuna valutazione finora
- CATIA V5 QuestionsDocumento10 pagineCATIA V5 Questionsvennesravan100% (1)
- Unity - InputDocumento5 pagineUnity - InputVictor Monteiro de OliveiraNessuna valutazione finora
- Den CharDocumento11 pagineDen CharReidacocadapreta100% (1)
- Displacement and Force in Two Dimensions-3Documento2 pagineDisplacement and Force in Two Dimensions-3varaprasadNessuna valutazione finora