Potrebbero piacerti anche
- Statechart Based Modeling and Controller Implementation of Complex Reactive SystemsDocumento6 pagineStatechart Based Modeling and Controller Implementation of Complex Reactive SystemsalbertuchisNessuna valutazione finora
- A Classification Framework For Automated Control Code GenerationDocumento23 pagineA Classification Framework For Automated Control Code GenerationalbertuchisNessuna valutazione finora
- Modern Solution For Controlling A Combined Fodder PlantDocumento6 pagineModern Solution For Controlling A Combined Fodder PlantalbertuchisNessuna valutazione finora
- Giulio Corradi Presentation PDFDocumento64 pagineGiulio Corradi Presentation PDFalbertuchisNessuna valutazione finora
- Giulio Corradi Presentation PDFDocumento64 pagineGiulio Corradi Presentation PDFalbertuchisNessuna valutazione finora
- OpchysysDocumento1 paginaOpchysysalbertuchisNessuna valutazione finora
- Ifix MBTCPDocumento25 pagineIfix MBTCPalbertuchisNessuna valutazione finora
- KalmanDocumento5 pagineKalmanalbertuchisNessuna valutazione finora
- Ifix MBTCPDocumento25 pagineIfix MBTCPalbertuchisNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Sqlplus Oracle BasicDocumento53 pagineSqlplus Oracle BasicfazaNessuna valutazione finora
- Core - 03 - C#Documento9 pagineCore - 03 - C#Ryan BaeNessuna valutazione finora
- Ques: Explain Oops Concepts in Detail With ExampleDocumento17 pagineQues: Explain Oops Concepts in Detail With ExampleTanay AgrawalNessuna valutazione finora
- Attributes DescriptionsDocumento3 pagineAttributes DescriptionsBrantano LeonNessuna valutazione finora
- Syllabus For Computer Programming II: Module 1: Introduction To JavaDocumento118 pagineSyllabus For Computer Programming II: Module 1: Introduction To JavaAbhishek GaikwadNessuna valutazione finora
- AN0005 SP-SK Control Word Rev 4Documento3 pagineAN0005 SP-SK Control Word Rev 4tvnexusNessuna valutazione finora
- AWP Chapter 1Documento71 pagineAWP Chapter 1kebe AmanNessuna valutazione finora
- GFG Flipkart QuestionsDocumento39 pagineGFG Flipkart QuestionsRajiv Poplai100% (1)
- Ui - Native GUI For iOS - Python 3.6.1 DocumentationDocumento79 pagineUi - Native GUI For iOS - Python 3.6.1 Documentationaasief sahiboNessuna valutazione finora
- Collections in Java - JavatpointDocumento15 pagineCollections in Java - JavatpointmanojNessuna valutazione finora
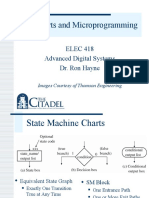
- SM Charts and Microprogramming: ELEC 418 Advanced Digital Systems Dr. Ron HayneDocumento38 pagineSM Charts and Microprogramming: ELEC 418 Advanced Digital Systems Dr. Ron Hayneashwani22Nessuna valutazione finora
- Arrays and The Arraylist Class: Starting Out With Java: From Control Structures Through Objects Fifth EditionDocumento75 pagineArrays and The Arraylist Class: Starting Out With Java: From Control Structures Through Objects Fifth Editionqwert11jNessuna valutazione finora
- Lab 1 Input, Processing, and OutputDocumento8 pagineLab 1 Input, Processing, and OutputGhost BKNessuna valutazione finora
- Renault Re-Prog Procedure (ENG)Documento21 pagineRenault Re-Prog Procedure (ENG)lavoineNessuna valutazione finora
- Isa s88Documento2 pagineIsa s88Sd Weds DsNessuna valutazione finora
- Report of LabviewDocumento5 pagineReport of LabviewAli AliNessuna valutazione finora
- A Tabu Search AlgorithmDocumento19 pagineA Tabu Search Algorithmmmaruys2Nessuna valutazione finora
- Data Structures and Algorithms - Slides UpdatedDocumento182 pagineData Structures and Algorithms - Slides UpdatedMehak NazNessuna valutazione finora
- Reversing Encrypted Callbacks and COM InterfacesDocumento31 pagineReversing Encrypted Callbacks and COM InterfacesTravis SolomonNessuna valutazione finora
- Bài tập phân tích thiết kế giải thuậtDocumento24 pagineBài tập phân tích thiết kế giải thuậtHiệp Sĩ GiấyNessuna valutazione finora
- The Definitive Guide To Hotwire and DjangoDocumento199 pagineThe Definitive Guide To Hotwire and DjangoКарлыгач ЖумабековаNessuna valutazione finora
- Basic VB Dotnet PDFDocumento57 pagineBasic VB Dotnet PDFAlfaz MahardhikaNessuna valutazione finora
- ICSE Class 10th Computer Applications Sample PaperDocumento2 pagineICSE Class 10th Computer Applications Sample PaperVarun S Varun100% (1)
- Fanuc 30i Data Input OutputDocumento10 pagineFanuc 30i Data Input OutputShahzad AnwarNessuna valutazione finora
- Log AplikasiDocumento12 pagineLog AplikasiAldyNessuna valutazione finora
- 1930 - Report Cover Page and Template - DITDocumento19 pagine1930 - Report Cover Page and Template - DITLim Zhong WeiNessuna valutazione finora
- SQL 02 MySQL Design HandoutDocumento3 pagineSQL 02 MySQL Design HandoutAlexandre CabrelNessuna valutazione finora
- JDBC - Java Database ConnectivityDocumento352 pagineJDBC - Java Database Connectivityapi-3745771100% (1)
- Erlang Programming RulesDocumento21 pagineErlang Programming RulesjoshmuzaNessuna valutazione finora
- The Notation - OOADDocumento133 pagineThe Notation - OOADSeena JassiNessuna valutazione finora