Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Estimation Curve For Modal Damping in Stay Cables With Viscous Damper - M Pacheco
Caricato da
mocker1987Titolo originale
Copyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Estimation Curve For Modal Damping in Stay Cables With Viscous Damper - M Pacheco
Caricato da
mocker1987Copyright:
Formati disponibili
E S T I M A T I O N C U R V E F O R M O D A L D A M P I N G IN S T A Y
CABLES WITH VISCOUS DAMPER
By Benito M. Pacheco, 1 Member, ASCE, Yozo Fujino, 2
Member, ASCE, and Ajai Sulekh3
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
ABSTRACT." TO simplifythe procedure of designingviscousdampers for stay cables
in bridges, a universal estimation curve is proposed that relates the modal damping
ratio of the cable with attached damper, the mode number, the damper size, the
damper location, and three parameters of the cable: span, mass per unit length,
and fundamental frequency, The curve is obtained from numerical complex-eigen-
value analysisof a taut cable with a singledamper near the anchorage, with judicious
grouping of these parameters into nondimensional factors. Several numerical ex-
amples illustrate the convenient use of this design aid, as well as show realistic
values of the required damper size and location and the expected additional damp-
ing in the first few modes. The damping to be attained is usually high enough to
suppress most vibrations induced by wind. However it is noted that a small sag of
the cable and slight nonviscous properties of the damper may reduce the damper
effectiveness. A modified design curve may have to incorporate these parameters
to provide better accuracy.
TOWARD SIMPLE DESIGN AID
Steel stay cables are widely used in m o d e r n bridges and other structures.
In fact, cable-stayed bridges of longer spans are becoming economically
competitive due to the efficient use of cables in carrying the static loads.
Long stay cables, however, are prone to dynamic problems. The natural
frequencies of a long cable tend to resonate with the dominant frequencies
of environmental forces, such as wind, vehicles, or pedestrians on a bridge,
while the inherent cable damping is usually too small. The vibrations, unless
suppressed or eliminated, m a y speed up fatigue or rapidly wear out the
protection system against corrosion.
Discrete viscous dampers m a y have to be attached to the cables near the
anchorage. This was done, for example, in the Brotonne Bridge in France
(Gimsing 1983); the Sunshine Skyway Bridge in Florida (Watson and Staf-
ford 1988); and, as the first case in Japan, in the A r a t s u Bridge (Yoshimura
et al. 1989). The cables may also be tied with secondary wires to reduce
their effective length and t h e r e b y avoid resonance; but this approach tends
to conflict with the aesthetics of the bridge.
In designing the viscous d a m p e r , an estimate of the additional damping
to be expected for the various modes of the cable is usually o b t a i n e d by
eigenvalue analysis (e.g., Meirovitch 1980). The analysis is very time con-
suming, although the configuration of a cable with a concentrated viscous
force may look simple if sag and bending effects are neglected. To be precise,
usually it has to be done on a c o m p u t e r using a large n u m b e r of degrees of
1Sr. Engr., Ammann & Whitney Consulting Engineers, New York, NY 10014-
3390; Formerly, Assoc. Prof., Univ. of Tokyo.
2prof., Dept. of Civ. Engrg., Univ. of Tokyo, Bunkyo-ku, Tokyo, Japan 113.
3Engr., Taisei Corp., Nishi-Shinjuku, Tokyo, Japan 163; Formerly Grad. Student,
Univ. of Tokyo.
Note. Discussion open until November 1, 1993. To extend the closing date one
month, a written request must be filed with the ASCE Manager of Journals. The
manuscript for this paper was submitted for review and possible publication on
February 2, 1991. This paper is part of the Journal of Structural Engineering, Vol.
119, No. 6, June, 1993. 9 ISSN 0733-9445/93/0006-1961/$1.00 + $.15 per
page. Paper No. 1311.
1961
J. Struct. Eng., 1993, 119(6): 1961-1979
freedom in the mathematical model of the cable. This must be repeated a
number of times while searching for an optimized size or location of the
damper. For different cables, separate numerical eigenvalue analyses may
have to be performed.
To avoid these tedious calculations during preliminary design, the present
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
paper shall propose a design curve that can be used graphically in: (1)
Choosing the proper size or location.of damper, for a required amount of
additional damping in a specified mode; and (2) estimating the additional
damping for the various modes, for given damper size and location.
In obtaining the estimation curve in a universal form, i.e., a form appli-
cable to most stay cables and dampers that are encountered in practice, it
will be assumed that only the first few modes of the cables are of interest,
and that the distance of the damper from the cable anchorage is within
several percent of the cable length. The curve will be compared with sim-
plified equations that have been proposed elsewhere. The use of the design
curve will be illustrated through actual examples of bridge stay cables.
The effect of cable sag, which has been neglected in all previous works,
will be analyzed theoretically in the last part of the paper. This is one of
the factors that may explain why the measured damping in some applications
was less than predicted (Yoshimura et al. 1989; Uno et al. 1991). Further-
more, an experiment using a small-cable model is discussed in Appendix
II. In this experiment, the maximum damping was also found to be less
than expected, but apparently for reasons other than sag. It will be em-
phasized that future studies may have to incorporate a few more factors in
a modified design curve.
EIGENVALUE ANALYSIS OF TAUT CABLE WITH VISCOUS DAMPER
Nondimensionalized Equation of Motion
The motion of the taut cable (Fig. 1) in the linear range is described by
the following partial differential equation:
T o2v OZv Ov
ox---~ = m -~y + c - ~ ~(x - Xc) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (1)
where T = initial static tension force in the cable; m = mass per unit length
of cable; c = damper coefficient; ~ = Dirac's delta function; x = coordinate
along the cable chord line; xc = location of the damper; t = time; and v
= lateral displacement from static position. The inherent damping of the
cable is assumed to be negligible.
The displacement is approximated by a finite series in the form
v(x, t) = ~ bi(t)+oi(x) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (2)
i=1
L
I~ .. >1
T I
FIG, 1. Taut Cable with Viscous Damper
1962
J. Struct. Eng., 1993, 119(6): 1961-1979
where n = number of degrees of freedom (DOF); bi(t) = generalized
displacement in the ith DOF; and r --- ith generalized coordinate, which
is selected here to be
~rix
r = sin--f ............................................. (3)
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
where L = span of the cable. ~bo/(X) is proportional to the ith undamped
mode of the cable. The corresponding undamped natural frequency is
"a'is
tOo/ = -~ ............................................... (4)
It is crucial in the development of a general design curve to nondimen-
sionalize the governing equation. Accordingly the following transformations
are used:
b = [bl(t), b2(t) . . . . b,(t)] r
L ................................... (5)
r = tOoat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (6)
(), = a(__) .................................................. (7)
0r
where %1 = fundamental natural frequency as given by (4) for i = 1.
Eqs. (2)-(7) are substituted into (1); by Galerkin method, each function
r i = 1, 2, 3, . . . n, is used as weighting function for the residual;
and the following orthogonality property is used:
fo (~oi(X)(boj(X) dx 1
= ~ g~ij . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (8)
where. 8ij = Kronecker delta, to obtain the following governing matrix
equation:
Mb" + C b ' + Kb = {0} ...................................... (9)
where
MU = ~u . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (10)
C u = 2 (m---L~ol)C sin --L--WiXc'sln~jx~.L . . . . . . . . . . . . . . . . . . . . . . . . . . . . (11)
Kij = i2~ij ................................................. (12)
Eq. (11) has grouped the cable and damper parameters into nondimensional
factors.
Practical Range of Parameters
As the preceding equations show, three nondimensional parameters are
independent: i, x c / L , and c/mL~Ool.In the present study, it is assumed that
only the first few modes of the cable are of interest, i.e., the integer pa-
rameter i is small. At the same time, it is only possible to attach the damper
at a location that is not too far from the cable anchorage, i.e., the ratio Xc/
1963
J. Struct. Eng., 1993, 119(6): 1961-1979
L is small, too. In most cases, the product of these two parameters, ixc/L,
will be less than (approximately) 0.15.
The practical range of the nondimensionalized damper coefficient,
c/mL%l, is also known approximately. It is not necessary to consider very
high c values; in the extreme case of infinitely large c, the point of attachment
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
of the damper becomes a fixed support that does not allow energy dissi-
pation. The optimum value of c/mLool that gives the maximum possible
damping to a specified mode has been indicated by Kovacs (1982) (Appendix
I) to be about 1/(2"rrixc/L), hence c/mL%1 need not be increased too far
beyond the preceding value.
Nonproportionality of Damping
It is obvious from (10)-(12) that the system is nonproportionally damped,
i.e., while the mass and stiffness matrices are diagonal the damping matrix
is not. The eigenvalue analysis of such a system is time consuming, because
the eigenvalue hi is a complex number. The real and imaginary parts of hi
correspond to two pieces of information about mode i; namely ~i is the
damping ratio and ~oi is the pseudoundamped natural frequency (e.g.,
Pacheco and Fujino 1989)
hi = ~oi(-{i + ~ X/1 - ~ ) .............................. (13)
A perturbation technique (Pacheco and Fujino 1989) has been tried (Sulekh
1990), with the objective of approximating ~i from (9) without the time-
consuming numerical eigenvalue analysis. This technique is effective when
the nonproportionality of damping is weak or moderate. However, it has
become apparent that as the damper coefficient c is increased around the
optimum value indicated by Kovacs (1982), the damping of the system
becomes too strongly nonproportional. The perturbations are so big in this
case that the perturbation method is clearly not applicable.
The damping nonproportionality in this system is weak only when the
value of c/mLooo1 is very small. If nonproportionality is then ignored alto-
gether, by ignoring the off-diagonal terms of the damping matrix, (11), the
modal damping ratio is approximately
Cii (14a)
~i- 2 ~ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
which can be simplified further by replacing the sine function with its ar-
gument
6i = "n2 c i .................................... (15)
Eqs. (14) and (15) are nearly equal in accuracy within the practical range
of ixcL that was previously discussed. In terms of ease of calculation, how-
ever, the form of (15) has an advantage, as will be shown later.
1964
J. Struct. Eng., 1993, 119(6): 1961-1979
Choice of Axes for Plotting Modal Damping against
Three Parameters
Eq. (15) or (14), cannot, of course, be used for the whole practical range
of c/mL%l; in fact, (15) does not predict an optimum damping ratio at all.
Numerical eigenvalue analysis of (9) has to be performed for moderate and
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
large values of c/rnLo~ol within the practical range, and the results have to
be plotted to observe the peak damping.
However, (15) does provide a hint how to choose the coordinates of the
graph in which the modal damping will be plotted versus the three param-
eters i, xc/L, and c/rnL~ool. The objective is to find a curve in the proper
set of coordinates such that the same curve is reasonably applicable to any
value of the three parameters within the practical range.
Kovacs (Appendix I) indicated that the maximum possible damping ratio
attainable in any specified mode is approximately 0.5 xc/L, i.e., the maxi-
mum value of the ratio ~i/(xc/L) is nearly constant at 0.5 and independent
of the parameters i and xc/L. The latter fact is a clue toward a universal
curve. The factor ~i/(Xc/L) appears in (15) if the equation is rewritten as
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Eq. (16) will plot as a single straight line that is applicable to any i, any Xc/
L, or any c/mL%~ if the chosen abscissa is (c/mL%0 i(xc/L) and the ordinate
is ~J(xJL). These coordinates will be used later in plotting the results of
the numerical eigenvalue analysis. Note that when (16) is plotted in these
coordinates, the straight line passes through the origin and the slope is ~r~.
Results of Numerical Eigenvalue Analysis
With matrices M, C, and K [(10)-(12)] as input, a standard computer
subroutine was used to calculate the complex eigenvalues ~i, i = 1, 2 . . . . ,
m. [For the QR method and other algorithms, i.e., Meirovitch (1980).] In
principle, the number of degrees of freedom n should be as large as man-
ageable, so that the error due to the finite-series approximation (2) could
be minimized. Also, as may be verified from (11), the coupling in the
damping matrix could be quite strong; using only the submatrix of the first
n rows and n columns, with small n, might not be a good approximation.
However, only the first m eigenvalues were to be actually computed, where
Fig. 2 shows the trend of convergence of the damping of the first mode
(i = 1), for the case of xc/L = 0.02, as the number of degrees of freedom
in the computational model n is increased. The straight line (n = 1) cor-
responding to (16) is also shown for comparison. It may be noted that fewer
degrees of freedom may give equivalent accuracy when finite-element mod-
eling is used instead of the present global Galerkin approach. The time
required in the iterations for the first few eigenvalues is not necessarily less,
however, as the coefficient matrices of the finite-element model do not
possess the special structure of (9)-(12).
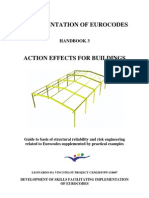
Fig. 3 shows that the modal damping ratios of the six lowest modes
converge around the same curve. Fig. 4 shows the convergence of several
cases with different values of xc/L, ranging from 0.01 to 0.10. Only mode
1 is shown here, as Fig. 3 has already illustrated that the other modes tend
toward the same curve, too.
1965
J. Struct. Eng., 1993, 119(6): 1961-1979
1.0 , I ' I I t
n=l
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
0.8
n=20
0.6
xc /L
n = 350
0.4
0.2
0 , I ~ I, , I , I ,
0 0.05 0.10 0.15 0.25 0.30
r xc
mLcoal L
FIG. 2. Convergence of First-Mode Damping Ratio as Number of Computational
Degrees of Freedom is Increased (xc/L -- 0.02)
Although modal damping is the main concern presently, the following
results of the complex-eigenvalue analysis (Sulekh 1990) are also worth
noting. First, the pseudoundamped frequencies toi, i = 1, 2 . . . . , rn, are
only slightly higher than the corresponding tooi, (4). Second, the method of
normalization of the corresponding complex eigenvector can be chosen such
that the real part resembles the undamped mode shape as given by (3), and
the imaginary part approaches zero when the damper coefficient is very
small. The typical shape of the imaginary part of mode 1 is shown in Fig.
5(b). Third, the eigenvector in Fig. 5 corresponds to mode 1 with optimized
damping. It can be observed in the numerical analysis of the first six modes
for xc/L = 0.02 that the imaginary and real parts are equal at x = xc, the
location of the damper, whenever the damping is optimal for the particular
mode.
U N I V E R S A L E S T I M A T I O N C U R V E FOR M O D A L D A M P I N G
Comparison with Other Proposed Formulas
Figs. 3 and 4 confirm the existence of optimum damping, as well as
indicate that a single curve can accurately represent the modal damping for
the first few modes and for realistically small values of xr The proposed
universal curve is plotted again in Fig. 6. The coordinates of the peak are
1966
J. Struct. Eng., 1993, 119(6): 1961-1979
0.7 ' I ' I ' I ' I ' I ' I ' I i I ' I '
=
0.6 - - mode 1
o mode 2
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
0.5
\ . mode 3
0.4 ~ [] mode 4
Xc/L I \ o modeS -
0.3
0.2
0.1
, I , I , I , I , f I [ 1 [, i _l L | ]
0
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 f.O
c ix_~c
m L COol L
FIG. 3. Convergence of the Six Lowest Modes (xc/L = 0.02)
0.7 ' I ' I ' I ' I ' I ' I ' I ' I ' I' '
0.6
0.5
0.4
xc IL 0.3
0.2
0.1
0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
mLto01 L
FIG. 4. Convergence of Mode 1 for Different Locations of Damper
listed in Table 1 in a modified form that allows comparison with other
proposed formulas.
The previous study of Kovacs (1982) was wholly concerned with optimi-
zation, i.e., estimating the coordinates of the peak in Fig. 6. Although only
the first mode was explicitly discussed in the original paper, Kovacs's result
1967
J. Struct. Eng., 1993, 119(6): 1961-1979
1.0
I:
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
0.5 ' 1.05 ' , ' , .
~t
, I , I , I ,
00 0.25 0.50 O.75 1.00
x/L
(a)
0.05 I I I
I:
ca.
ltl
, I , I , I ,
-0.05 0 0.25 0.50 0.75 1.00
x/L
(b)
FIG. 5. Real and Imaginary Parts of the Complex Eigenvector of Mode 1 (xJL =
0.02)
is identical in form with that of the present work (Table 1), if extended by
analogy to higher modes (Appendix I).
The more recent numerical analysis of Yoneda and Maeda (1989) led to
empirical equations of a different form, for optimum damper size and cor-
responding modal damping. Their equations (Table 1) give nearly the same
values as the present formulas do, for practical parameters of the cable and
damper as discussed earlier in this paper; but the present equations are
much less cumbersome to use, especially when xc/L is to be designed,
because both Copt,iand ~s. . . . are expressed as linear functions of xc/L.
Yoneda and Maeda (1989) analyzed specific cable examples and consid-
ered a wide range of values of the damper coefficient c, including the
optimum. For quick estimation of modal damping due to a damper at spec-
ified location xc, they finally proposed four linear functions of c, each one
1968
J. Struct. Eng., 1993, 119(6): 1961-1979
0.7 1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1
.... .'"" ': ",, .; """ ':" , , , , ~,'" ". ".,..,. ;'"" :, ,,,' P'., .: ,,," ~",, ..~,.'' ';'. ,..:."' '.~',,, c," ". ;,,,,, ;",., ; ....
0.8 .... i i i ....
.... :,. ,..:.... ,..,,, ,...,,.: ......................................................................................
~_ : L .
o.s
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
"": """i " x ~'~ T "[
~i 0.4 " ~ ~ -.
xc /L 0.3
0.2
0.1
0
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
r ixe
mL(ool L
FIG. 6. Universal Curve Relating Modal Damping Ratio ~i with Damper Size c,
Location xc, Mode Number i, and Cable Parameters m, L, ~Oo,
TABLE 1. Comparison of Optimal Damper and Maximum Damping
Copt,i
Study (N" sec. m-l) ~i. . . .
(1) (2) (3)
Present O.l OrnLo~oj(ixr L ) 0.52xc/L
Kovacs(1982) 1/2"rr(mLt%l)/(ixe/L) 1/2xc/L
Yonedaand Maeda
(1989) 6.25/2~r(mLO~oliXr (6.25/2w)xc/L[0.45 + (xc/L)]
Uno et al. (1991) 6.25/(2"rr)(mLt%lxc/L)/[i sin2(rrxJL)] (3.3/2w)(xc/L)
being applicable to a different range of damper size. Their cop, was used as
reference in defining the four regions of c; but there was no direct attempt
to use a nondimensionalized damping coefficient as parameter.
Extending Yoneda and Maeda's (1989) work, Uno et al. (1991) introduced
nondimensionalization of the damper coefficient, and modified the formula
for optimized modal damping into a linear function of x c / L , instead of
quadratic (Table 1). Independently of the present work (see also Sulekh et
al. 1990), Uno et al. also obtained a generalized curve that is practically
the same as Fig. 6, except for keeping the sine function of x c / L in the
nondimensionalized damper coefficient. Again, the present definition of
nondimensional parameter is more convenient for calculations, since it does
not contain the sin 2 function of x c / L .
Application in Design: Examples
Fig. 6 may be used in different ways in the design of a viscous damper.
In the following examples, two cables (Table 2) of an actual multi-stay-
cable bridge (center span = 420 m) are considered (Yoneda and Maeda
1989).
1969
J. Struct. Eng., 1993, 119(6): 1961-1979
TABLE 2. Properties of Example Cables (Yoneda and Maeda 1989)
m L T ~o~ (Eq. 4)
Cable (kg. m-~) (m) (N) (sec- ~)
(1) (2) (3) (4) (5)
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
C1 98.6 215.11 3.69 x 106 2.825
Cl1 78.3 92.28 3.05 x 106 6.719
.I,I,I,,.I.I.I.L.I.I.I.I.I.I.I.I.I,I.
-~....'....g--.4--i.... --..~,...~.......-b...i....4....~...4-..~....~..~....~ .... -'§247247247
LL~:: i..TT.h VFT-1Ti-I-ViTV,. r.... -:-~..............] ' i ' i ! i i i i ! ! i i
..~.~IITrTTTT!tH+4-§
(2) :::::2::;:::2::::2::::-:::::::::2::::i:::::::::::::::::::::: :,"T"TYT'r"'r'T"'~"'r'"~'$"t-t"h't"'["'t
[-~N.I-H-...t-t-+...1..,..t...V,.t...t.-..V..t-
;-.!.... (2) 0.43
t ? l ' ~ l : : : ~ i ' F - r T - v v ; ! ~~ ~~
:::::::::::::::::::::::::::::::::::::::::::::::
~ .I..L..LLL.i' i,,L (4) 0.26 ~~~IY"V'?-T'V'F"rT',~L..L_~,.,.i....:.
"T"I.... ~f'
0.1 0.2 0.19 0.38
(I) (3) (1) (3)
(b)
"I'VIJ'I'I'I'I'I'I'I'I'L'i'I'I'I'L'I'~
9..i....§247163 ..~....i..~
~.:~L~i~~``.~'.~i~1~L~:~.~.~L~L~ L~ -}-+ 4-.-§ 9 k..i.-. §
...... 4 -..'..--~.,..:..--L.-,~...-:....].-.,~-'....,L...I....-.-....,-.,..L..:....:..z (4) 0,51 ..}....~....i...4....'
. . ..4...:....:....i.....i.....,.~
. . . . . . ....~..~-.L.L..'..~.L..~........
..L ~* ~....L..L..L..L..,L..L.L.i....i....L.L.,L -'- ..L..L -"
(1) 0.48 ~&.i..i...i.Lk i-i S..i..i..i/..i.L: (2) 0.45 ....LLi::Li::ES::L:i::5::i::LI::LI::i:
~L: L L L ~ ~! ~ L: : ~ _ i ....
H....H-.H-q.-i-i-..H..i i H-.- , ~ ~ a ~ ~ ~ "~":'"Y"Y"!'"F'
....r -..v...r-..r,-.r-'r -'~-"v"~"'~""~"~-"-~- - - 9 ~-'"r"
0.070A4 0.06 O.12
(:)(3) (1) (3)
(c) (a)
FIG. 7. Examples Using Universal Curve
Example 1
The damping of m o d e 1 of cable C1 is to be maximized, subject to the
constraint that x J L cannot exceed 0.0235 (i.e., xc should not exceed about
5 m; this limit may be determined by the slope of the cable and the m a x i m u m
allowed height o f d a m p e r attachment from the bridge deck level, which is
about 2.0 m in this case). D e t e r m i n e the p r o p e r d a m p e r size, and the
corresponding damping to be expected for modes 1 and 2.
Fig. 7(a) indicates the sequence of calculation by the labels n u m b e r e d 1
through 4 in parentheses and referred to herein as sequences 1 - 4 . Assuming
that the maximum allowed distance is used, the corresponding d a m p e r size
that will give o p t i m u m abscissa in sequence 1 is c o m p u t e d as
c = 0.1 (98.6)(215.11)(2.825) = 2.55 • 1 0 S N - s e c . m -1 . . . . . . . . . . (17)
(1)(o.o235)
and the corresponding damping for m o d e 1 is read from the ordinate at
sequence 2
1970
J. Struct. Eng., 1993, 119(6): 1961-1979
~ = 0.52(0.0235) = 1.22% .................................. (18)
For mode 2, the abscissa at sequence 3 is twice that of mode 1. The damping
is read at sequence 4
~2 = 0.42(0.0235) = 0.99% .................................. (19)
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
These modal damping values are large enough to suppress most types of
wind-induced vibration. If, due to space and other constraints, the distance
x~ is reduced to half, optimal damping for mode 1 will be obtained by
doubling the damper size; but then the damping ratios will be half of the
respective values just given.
Example 2
The damping of mode 1 of the shorter cable, C l l , is to be maximized
using the same damper size as determined for cable C1 in example 1, pro-
vided that xJL should not exceed 0.0364 (i.e., xc should not be much more
than 3.3 m). Determine the proper xJL and the expected ~1 and ~2.
As a first trial, assume that the maximum allowed xjL is used, i.e.,
0.0364; then the abscissa becomes 0.19, sequence 1 in Fig. 7(b). The first
modal damping is read at sequence 2:~1 = (0.43)(0.0364) = 1.57%. For
the second mode the abscissa, sequence 3 in the figure, is of course twice
that of sequence 1; the second modal damping is read at sequence 4:~2 =
(0.26)(0.0364) = 0.95%.
It may be noted that in comparison with the respective values in example
1, in which the same damper size has been used, the present first-mode
damping is higher while the second-mode damping is lower.
For a second trial, the damper location is selected such that the abscissa
of the first mode is at sequence 1 of Fig. 7(a), i.e., corresponding to the
peak in the universal curve
_ (78.3)(92.28)(6.719)
xc = 0.1 = 0.0190 ........................ (20)
L (1)(2.55 x 105)
This is just a little more than half of the maximum allowed value of 0.0364.
The corresponding damping is read from the ordinate at sequence 2:~1 =
(0.52)(0.0190) = 0.99%. The second-mode damping is read at sequence 4:
~2 = (0.42)(0.0190) = 0.80%.
On comparing the two trials, it is apparently better to attach the damper
at the greater distance of xc/L --- 0.0364 [the first trial; Fig. 7(b)] even
though the corresponding point in the universal curve is not the peak point
for either mode.
Example 3
The damping ratios of modes 1 and 2 of cable C1 are to be maximized
using again the damper size determined in example 1. Note in contrast that
only the first mode is explicitly being optimized in example 1. Determine
the proper xcL, and the expected ~1 and ~2. Check if it is possible and
preferable to make the damping of mode 2 equal to mode 1.
Fig. 7(c) indicates at sequence 1 that it is possible to find an ordinate that
corresponds to two values of the abscissa, where one--corresponding to
mode 2 and shown at sequence 3 in Fig. 7(c)--is twice the o t h e r - -
corresponding to mode 1 and shown at sequence 2; hence it is possible to
make the damping ratios of modes 1 and 2 equal. The abscissa at sequence
1971
J. Struct. Eng., 1993, 119(6): 1961-1979
2, corresponding to mode 1, is 0.07. For the damper size determined in
example 1, the location should be
x~ = 0.07 (98.6)(215.11)(2.825) = 0.0164 . . . . . . . . . . . . . . . . . . . . . . . (21)
L (1)(2.55 x 105)
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
and the damping ratios for the two modes are equal at
~a = ~2 = 0.48(0.0164) = 0.79% ............................. (22)
Comparing this with example 1, it is apparent that the damper location in
example 1, corresponding to a much greater xc/L, is preferable if the same
damper size is to be used.
Example 4
The damping ratios of modes 1 and 2 of cable C1 are to be maximized
(as in example 3) except that the maximum damper size that may be used
is only 1.5 x 105 N - s e c . m - L
With this damper size and the maximum allowed location of xc/L =
0.0235, the abscissa for mode 1 is 0.06, which is sequence 1 in Fig. 7(d).
Mode 2 is at sequence 2. The damping ratios for the two modes, which are
read at sequences 3 and 4 are
~1 m 0.45(0.0235) = 1.06% .................................. (23)
~2 = 0.51(0.0235) = 1.20% .................................. (24)
This design is apparently better than the trial in example 3, in which the
two modal damping ratios are made equal, although the present damper
size is much smaller. It may be noted, too, that the second-mode damping
in the present example is larger than that of the first mode. In fact, mode
2, instead of mode 1, has nearly optimum damping.
Example 5
The damping ratios of modes 1 and 2 of cable C l l are to be made equal,
and the smaller damper of example 4, c = 1.5 x l0 s N . s e c . m -a, is to be
used. Determine the proper xc/L, and the expected ~1 and ~2. Compare
with the design in example 2.
By calculations following Fig. 7(c), it is found that the necessary location
is xc/L = 0.0226, which gives the same damping ratio of 1.08% to the two
modes. Comparing with the two trial designs in example 2, it is observed
that the present design is the best as far as mode 2 is concerned, and it is
the second best for mode 1.
The preceding examples demonstrate the convenience of having a uni-
versal design curve. The present definition of abscissa is particularly con-
venient in the calculation of xc/L in the second trial of example 2, and in
examples 3 and 5.
EFFECT OF SMALL SAG
The design curve of Fig. 6 has been based on idealized cable and damper,
ignoring such factors as cable sag, flexural rigidity of the cable, stiffness of
the damper, or nonlinear damper characteristics. The effect of small sag is
analyzed here; Fig. 8 exaggerates the sag, for clarity.
Following the formulation of Irvine (1981), the static profile of the cable
is assumed to be parabolic and the effect of the inclination of the cable
1972
J. Struct. Eng., 1993, 119(6): 1961-1979
t,,r
L )1
VI -'- V
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
FIG. 8. Cable with Small Sag
chord is ignored. This simplification is accurate when the ratio of midspan
sag to span is 1:8 or less. The equation of motion becomes
kZ fL 02V OV
Z~ 02~' n Jo vax = m + c--8(x - x0 ............... (25)
ox 2 - -U o,
where H = component of initial static tension T, along the (horizontal)
chord; and the dimensionless sag p a r a m e t e r k 2 is (Irvine 1981)
~2 L, A
.......... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (26)
LeH
Le=L
[ (r
where, for small sag
1+~ 1 ................................... (27)
In (26), g = acceleration due to gravity; E = Young's modulus; A = cross-
sectional area; and t e statically extended length of the cable, h 2 in stay
---
cables seldom exceeds the value 1.0 (Gimsing 1983).
Again using (2)-(8), the governing matrix equation is obtained in a form
identical to (9) except that the stiffness matrix is not diagonal
2h 2 [1 -- (-- 1)'111 -- (-- 1)q
Kij = i28ij -k ,re----
s ij ...................... (28)
which is identical to (12) if X2 is zero, i.e., if sag is negligible.
When i is an even integer, the off-diagonal terms (j :~ i) of the stiffness
matrix are zero and the diagonal term is identical to that in (12), as can be
verified from (28). By (3), it may be recalled that qbo~(X) for even-valued i
is antisymmetric about the midspan. Such qbo~(X) has zero contribution to
the integral in the second term of the left-hand side of (25). Hence, it can
be seen that the even-numbered modes, which are antisymmetric, are not
to be affected by the small sag.
Fig. 9 shows the damping ratios of the six lowest modes for the same
parameters as in Fig. 3, except that the sag parameter k 2 is not zero, but
1.0. It can be observed that due to the sag the first-mode damping is mod-
erately reduced although the other odd-numbered modes are hardly af-
fected.
1973
J. Struct. Eng., 1993, 119(6): 1961-1979
0.7 I I I I I ! I I I " J
0.6 o mode 1
o mode 2
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
0.5
0.4 A mode 4
v mode 5
xc/L 0.3 * mode 6
12~
0.2 r o
vt v ~ ,k #t
0.1
., , . . . . , , , . , , , , . , .
0
0 0.1 0.2 0 3 . 4 0 . 0.5 0.6 0.7 0.8 0.9 1.0
C ixc
mLco01 L
FIG. 9. Effect of Mode 1 of Small Sag (;~2 = 1.0, xc/L = 0.02)
It is clear that further parametric study of sag and other factors (e.g.,
Appendix II) is required for the applicability of the design curve to be made
more comprehensive.
CONCLUSION AND RECOMMENDATION
Viscous dampers near the cable anchorage are a viable means to raise
the modal damping of long stay cables and suppress most types of vibrations,
particularly those induced by wind, provided there is enough distance from
the cable anchorage to the point of attachment of the damper. The maximum
possible modal damping is directly proportional to this distance. For the
specified location, the maximum possible damping can be attained through
the use of an optimal damper size. Examples in the present paper have
shown typical values.
The present study has propose d a universal curve relating modal damping
ratio, mode number, damper size, damper location, and three cable param-
eters: span, mass per unit length, and fundamental frequency. The unified
curve has been obtained by grouping these parameters judiciously. With
this curve, the preliminary design of viscous dampers, including the esti-
mation of expected additional damping in the first few modes of the cable,
becomes very simple. Several design situations have been illustrated in the
examples.
When better accuracy is desired from a design curve like the one pro-
posed here, it may be necessary to incorporate the effect of small sag
through a dimensionless sag parameter, especially for very long spans.
Slight nonviscous properties of actual dashpots may have to be considered
as well.
1974
J. Struct. Eng., 1993, 119(6): 1961-1979
APPENDIX I. EXISTENCEOF OPTIMUM DAMPER SIZE
Fig. 10 is from Kovacs (1982). Although only the first mode was treated
explicitly in the original paper, it is shown here that Kovacs's reasoning can
be extended readily to higher modes.
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
Schematic frequency-response curves are plotted in Fig. 10 for three
values of c: c = 0 (no damper; solid curve); c = infinite (extremely large
damper; solid curve); and c = Coe,(optimal-size damper; dashed curve). 12
is the frequency of harmonic excitation; the force is assumed to excite only
one mode. ct is the dynamic magnification factor, i.e, the ratio of the am-
plitude of harmonic response to the static deflection that would occur if the
force were applied very slowly.
When c = 0, the mode is completely undamped; the frequency-response
curve tends to infinity (i.e., resonance) at 12 = O~oz.When c = infinite, the
mode does not get any damping, either; the frequency-response curve tends
~ ----~ T
.x~ ~ c=O
.S~.. . . '....j l ~ - ~ c=~
a
C--O~
C=Copt--~. " /
t ~L__
Xc
1.0
= o~(I+~L)~
0 0901 ~ol/(1--~-)
FIG. 10. Kovacs's Definition of Optimum Damper
1975
J. Struct. Eng., 1993, 119(6): 1961-1979
again to infinity. The latter resonance occurs at ~ = t%J(1 - xc/L), this
being the natural frequency when the effective length is L(1 - xc/L).
The two response curves are defined by
1
~c=o = . ..................................... (29)
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
1 I ............................. (3o)
I
These curves intersect at a frequency between %1 and O~ol/(1 - xc/L)
ac=o = a . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (31)
1 1
- . . . . . . . . . . . . . . . . . . . . . . . . . . (32)
1 ,
Kovacs (1982) gave the approximation
1 xc~ ........................................ (33)
with the assumption that xo/L is small.
Correspondingly, the dynamic magnification factor at this frequency can
be approximated by (29)
1
................................................ (34)
Assuming a single m o d e with viscous damping, the corresponding damping
ratio is
1
~max = - - ............................................. (35a)
20topt
1 X~
~rnax = ~ Z ............................................... (35b)
F r o m his analysis of the frequency response for different d a m p e r sizes,
Kovacs estimated the o p t i m u m c as
mLO~ol
Cop t ~ - - ............................................ (36a)
Coe, ~ 1 ......................................... (36b)
1976
J. Struct. Eng., 1993, 119(6): 1961-1979
Eqs. (35) and (36) may be extended to higher modes, by treating L in
Fig. 10 as L/i, i.e., by considering the shown mode shape as simply the
rightmost portion of a higher mode. The frequency ~Oolis to be treated then
as i%1. The extended formulas are
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
1 Xc . .............................................. (37)
~i.... ~ 2 L
Coet,i ~, 1
.......................................... (38)
mLr
It should be noted that according to (37), the maximum possible damping
ratio is independent of the mode number i.
APPENDIX II. EXPERIMENT WITH SMALL-CABLE MODEL
Fig. 11 is from Sulekh (1990). A steel-wire rope was fitted with improvised
viscous damper, and the damping ratio was estimated from the logarithmic
decrement of free vibration. Silicone oil was used as the liquid in the damper,
because it was available for a wide range of different kinematic viscosities.
The viscosity was hardly affected by temperature change.
The wire (cable) properties are: m = 0.07 k g . m -1, L = 2.08 m, and T
= 59.4 N. The lowest natural frequency is about 44 sec-1 or 7 Hz. The sag
parameter (Irvine 1981) is negligible.
The piston of the damper is simulated by a light wooden square plate,
which is about 0.02 m on a side, attached to the wire by a wooden stick.
As damper cylinder, an open container with silicone oil is used. The abscissa
in Fig. 11 is the kinematic viscosity of the oil, instead of the damper coef-
ficient c. The effective coefficient of this improvised damper is difficult to
0.7 ~I I ' I ' I ' I ' I ' I
0.6
0.5
0.4
xc / L 0 0
0.3 0
O0 0
0.2 0
0
0.1
2
0
0 '0.'01 O. ~ l l ~ l
0.03 0.04 0. ~
~ l , l , l
0.06 0.07 &08
J
Kinematic viscosity of silicone oil (m2/$)
FIG. 11. Damping of Mode 1 in Experimental Model (xc/L = 0.06) (Sulekh 1990)
1977
J. Struct. Eng., 1993, 119(6): 1961-1979
calibrate, as it depends not only on the kinematic viscosity of the liquid but
also on the geometry of the piston.
Fig. 11 illustrates that there is indeed an optimum viscosity (optimum
damper), which provides the maximum possible modal damping ratio. How-
ever, this peak does not reach the predicted value; the ordinate of Fig. 11
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
does not reach 0.52. Since the wire rope is very close to the idealized taut
cable, it may be surmised that most of the discrepancy in modal damping
is attributable to the damper itself. Some characteristics of the improvised
damper and the idealized viscous dashpot may have been significantly dif-
ferent.
APPENDIX III. REFERENCES
Gimsing, N. J. (1983). Cable-Supported Bridges. John Wiley & Sons, Chichester,
England.
Irvine, H. M. (1981). Cable Structures. MIT Press, Cambridge, Mass.
Kovacs, I. (1982). "Zur frage der seilschwingungen und tier seildampfung." Die
Bautechnik, 10, 325-332 (in German).
Meirovitch, L. (1980). Computational methods in structural dynamics. Sijthoff and
Noordhoff, Alphen aan den Rijn, The Netherlands.
Pacheco, B. M., and Fujino, Y. (1989). "Perturbation technique to approximate the
effect of damping non-proportionality in modal dynamic analysis." J. Structural
Engrg./Earthquake Engrg., Japan Society of Civil Engineers, Tokyo, Japan, 6(1),
169s-178s.
Sulekh, A. (1990). Non-dimensional curves for modal damping in stay cables with
viscous dampers, MS thesis, Dept. of Civil Eng., Univ. of Tokyo, Tokyo, Japan.
Uno, K., Kitagawa, S., Tsutsumi, H., Inoue, A., and Nakaya, S. (1991). "A simple
method of designing cable vibration dampers of cable-stayed bridges." J. Struct.
Engrg., Japan Society of Civil Engineering, Tokyo, Japan, 37A, 789-798.
Watson, S. C., and Stafford, D. (1988). "Cables in trouble." Civil Engineering,
ASCE, 58(4), 38-41.
Yoneda, M., and Maeda, K. (1989). "A study on practical estimation method for
structural damping of stay cable with damper." Proc., Canada-Japan Workshop
on Bridge Aerodynamics, Ottawa, Canada, 119-128.
Yoshimura, T., Inoue, A., Kaji, K., and Savage, M. (1989). "A study on the aero-
dynamic stability of the Aratsu Bridge." Proc. Canada-Japan Workshop on Bridge
Aerodynamics, Ottawa, Canada, 41-50.
APPENDIX IV, NOTATION
The following symbols are used in this paper:
A = cross-sectional area;
bz(t) = generalized displacement in ith degree of freedom;
c = viscous damper coefficient;
Cop,,i = optimal damper coefficient for mode i;
E = Young's modulus;
g = acceleration due to gravity;
H = horizontal component of T;
i, j = mode number;
L = span of cable;
Le = length of cable with sag;
m = mass per unit length of cable;
n = number of degrees of freedom in computational model of cable;
T = initial static tension force in cable;
1978
J. Struct. Eng., 1993, 119(6): 1961-1979
t = time;
v(x, t) = lateral displacement from static position;
X = coordinate along cable chord axis;
Xc = location of damper;
= dynamic magnification factor;
Downloaded from ascelibrary.org by Technische Universitat Munchen on 01/07/20. Copyright ASCE. For personal use only; all rights reserved.
hi = complex eigenvalue of mode i;
h2 = sag parameter;
= damping ratio of mode i;
~i,max = maximum possible damping ratio for mode i;
T = nondimensionalized time;
+oi(x) = ith generalized coordinate; undamped mode of taut cable;
= circular frequency of harmonic exciting force;
6Oi = pseudoundamped natural circular frequency o f mode i; and
OJoi = undamped natural circular frequency of mode i.
J. Struct. Eng., 1993, 119(6): 1961-1979
Potrebbero piacerti anche
- Estimation of Damping Ratio of Cable-Stayed Bridges For Seismic Design by Kazuhiko Kawashima, T Shigeki Unjoh, 2 and Meguru Tunomoto 3Documento17 pagineEstimation of Damping Ratio of Cable-Stayed Bridges For Seismic Design by Kazuhiko Kawashima, T Shigeki Unjoh, 2 and Meguru Tunomoto 3じゅんこ塩原Nessuna valutazione finora
- Agilent Eesof Eda: Characterization and Modeling of Bond Wires For High-Frequency ApplicationsDocumento6 pagineAgilent Eesof Eda: Characterization and Modeling of Bond Wires For High-Frequency ApplicationsRavinder KumarNessuna valutazione finora
- Optimization of Cable Tensioning in Cable-Stayed Bridges: D. Janjic M. Pircher and H. PircherDocumento7 pagineOptimization of Cable Tensioning in Cable-Stayed Bridges: D. Janjic M. Pircher and H. PircherpkrnNessuna valutazione finora
- WIRELINE_STRETCHDocumento2 pagineWIRELINE_STRETCHLuisNessuna valutazione finora
- Cable VibrationDocumento15 pagineCable VibrationStructureClassNessuna valutazione finora
- Ampacity Calculations For Deeply InstallDocumento10 pagineAmpacity Calculations For Deeply InstallsajuaanalsaNessuna valutazione finora
- Ijnm AogDocumento21 pagineIjnm Aogvincenzo.gattulliNessuna valutazione finora
- Underground Cable Fault DetectorDocumento21 pagineUnderground Cable Fault DetectorgiriNessuna valutazione finora
- Reconfigurable ReflectarraysDocumento16 pagineReconfigurable ReflectarraysBryan396100% (1)
- Design Analysis of Hybrid Cable-Stayed Suspension Bridges PDFDocumento14 pagineDesign Analysis of Hybrid Cable-Stayed Suspension Bridges PDFjaswantNessuna valutazione finora
- Impedance Measurements in Coaxial Waveguide Systems: R. L. Jesch R. M. JicklingDocumento12 pagineImpedance Measurements in Coaxial Waveguide Systems: R. L. Jesch R. M. JicklingRizkya RahmandhitaNessuna valutazione finora
- CM-P1 11604 EN SKF Vibration Sensors Catalog InstallationDocumento8 pagineCM-P1 11604 EN SKF Vibration Sensors Catalog Installationambresh.09Nessuna valutazione finora
- Dual Beam Cellular Base Station Antenna with Adjustable Beam PatternsDocumento17 pagineDual Beam Cellular Base Station Antenna with Adjustable Beam Patternsamos JosephNessuna valutazione finora
- A Comprehensive Battery Energy Storage Optimal Sizing Model For Microgrid ApplicationsDocumento13 pagineA Comprehensive Battery Energy Storage Optimal Sizing Model For Microgrid ApplicationsJin JiangNessuna valutazione finora
- Elegance and Strength: NetwoDocumento8 pagineElegance and Strength: NetwoSoham BandyopadhyayNessuna valutazione finora
- Accurate Models For Microstrip Computeraided DesignDocumento3 pagineAccurate Models For Microstrip Computeraided DesigndfghjklvbhnmNessuna valutazione finora
- Accurate Models For Microstrip Computer-Aided DesignDocumento3 pagineAccurate Models For Microstrip Computer-Aided DesignDenz ChoeNessuna valutazione finora
- Crosstalk Analysis in Complex Aeronautical Bundle: Charles Jullien, Philippe Besnier Michel Dunand Isabelle JunquaDocumento6 pagineCrosstalk Analysis in Complex Aeronautical Bundle: Charles Jullien, Philippe Besnier Michel Dunand Isabelle JunquaEngineerOmarNessuna valutazione finora
- Leon - 1989 - Interior Joints With Variable Anchorage LengthsDocumento15 pagineLeon - 1989 - Interior Joints With Variable Anchorage LengthsMarimuthu KaliyamoorthyNessuna valutazione finora
- 1 s2.0 S0141029619314634 MainDocumento18 pagine1 s2.0 S0141029619314634 MainFredy PicaulyNessuna valutazione finora
- Signal Integrity Tips and VNA MeasurementsDocumento43 pagineSignal Integrity Tips and VNA MeasurementsF.DzialoNessuna valutazione finora
- Om Yz BR Isscc 22Documento3 pagineOm Yz BR Isscc 22Ganagadhar CHNessuna valutazione finora
- Crossed Dipole Antennas: A ReviewDocumento17 pagineCrossed Dipole Antennas: A ReviewpremNessuna valutazione finora
- 04384451Documento10 pagine04384451arpan palNessuna valutazione finora
- Gruszczynski 2006Documento7 pagineGruszczynski 2006moraeunwprqphslndfNessuna valutazione finora
- Electromagnetic and Electrostatic Transmission-Line Parameters by Digital ComputerDocumento10 pagineElectromagnetic and Electrostatic Transmission-Line Parameters by Digital Computermrjack1Nessuna valutazione finora
- A Millimeter-Wave Perpendicular Coax-To-Microstrip Transition - Microwave Symposium Digest, 2002 IEEE MTT-S InternationalDocumento4 pagineA Millimeter-Wave Perpendicular Coax-To-Microstrip Transition - Microwave Symposium Digest, 2002 IEEE MTT-S Internationalgilberto araujoNessuna valutazione finora
- CAN Electric Utility LR Pages 1 160Documento160 pagineCAN Electric Utility LR Pages 1 160Rob KhaniNessuna valutazione finora
- Mooring With Multicomponent Cable Systems: K. A. AnsariDocumento8 pagineMooring With Multicomponent Cable Systems: K. A. AnsariSoledad AceitunoNessuna valutazione finora
- Ote 3850 Ropes For Deep Water Mooring: by T. LTDDocumento12 pagineOte 3850 Ropes For Deep Water Mooring: by T. LTDcmkohNessuna valutazione finora
- Requirements, Radio High-Voltage: Insulation Corona Interference For LinesDocumento9 pagineRequirements, Radio High-Voltage: Insulation Corona Interference For Linesboxeli2281Nessuna valutazione finora
- Nenadović, A. Tensegrity PDFDocumento10 pagineNenadović, A. Tensegrity PDFPatrickNessuna valutazione finora
- Transceiver Architecture Selection: Review, State-of-the-Art Survey and Case StudyDocumento21 pagineTransceiver Architecture Selection: Review, State-of-the-Art Survey and Case StudyrfidguysNessuna valutazione finora
- Robust High Voltage Cable Joint DesignDocumento5 pagineRobust High Voltage Cable Joint DesignsubhankarNessuna valutazione finora
- Higher Ampacity With Interleaved BusbarsDocumento4 pagineHigher Ampacity With Interleaved BusbarsmuthakkerNessuna valutazione finora
- Interleaved Bus Bar Explanation PDFDocumento4 pagineInterleaved Bus Bar Explanation PDFVikram Singh100% (1)
- Higher Ampacity of Busbars: Prospect/RetrospectDocumento4 pagineHigher Ampacity of Busbars: Prospect/RetrospectmuthakkerNessuna valutazione finora
- Cross-Bonding For MV Cable Systems: Advantages and Impact On Accessories DesignDocumento5 pagineCross-Bonding For MV Cable Systems: Advantages and Impact On Accessories DesignLuis ÁtilaNessuna valutazione finora
- 2014-Reconfigurable Reflectarrays and Array Lenses For Dynamic Antenna Beam Control A ReviewDocumento16 pagine2014-Reconfigurable Reflectarrays and Array Lenses For Dynamic Antenna Beam Control A Reviewadamhong0109Nessuna valutazione finora
- mrs2007 234Documento6 paginemrs2007 234Antonio BatataNessuna valutazione finora
- Lumped Track Layout Design For Dynamic WDocumento10 pagineLumped Track Layout Design For Dynamic WkalakhetianushaNessuna valutazione finora
- Characteristic Impedance of Shielded Stripline PDFDocumento6 pagineCharacteristic Impedance of Shielded Stripline PDFLarry StellNessuna valutazione finora
- The Design of Sigma-Delta Modulation Analog-To-Digital ConvertersDocumento12 pagineThe Design of Sigma-Delta Modulation Analog-To-Digital ConvertersnsitdelhiNessuna valutazione finora
- High-Frequency Characterization of Twisted-Pair Cables: José E. Schutt-Ainé, Senior Member, IEEEDocumento4 pagineHigh-Frequency Characterization of Twisted-Pair Cables: José E. Schutt-Ainé, Senior Member, IEEEjffm7147Nessuna valutazione finora
- Analysis of Subsea Umbilicals and CablesDocumento2 pagineAnalysis of Subsea Umbilicals and CablesSethGraceNessuna valutazione finora
- PHASAR-Based WDM-Devices Principles, Design and ApplicationsDocumento15 paginePHASAR-Based WDM-Devices Principles, Design and Applicationswlltld100% (1)
- Katalog-KTS en 2018 10Documento1 paginaKatalog-KTS en 2018 10Alomaki KismaNessuna valutazione finora
- Precast Segment Lining DesignDocumento11 paginePrecast Segment Lining DesignM Sajid IqbalNessuna valutazione finora
- Charging System Technique: Wireless Switched SmartDocumento4 pagineCharging System Technique: Wireless Switched SmartHamza HebNessuna valutazione finora
- Thousands of Conductance Levels in Memristors Integrated On CMOSDocumento9 pagineThousands of Conductance Levels in Memristors Integrated On CMOSSumit DiwareNessuna valutazione finora
- A Six-Port Network Based On Substrate Integrated WDocumento11 pagineA Six-Port Network Based On Substrate Integrated Wli kelkelNessuna valutazione finora
- Transient Oscillations in Multi-Winding TransformersDocumento10 pagineTransient Oscillations in Multi-Winding TransformersIlona Dr. SmunczNessuna valutazione finora
- Journal: Design Notes On The Resistance-Capacity Oscillator CircuitDocumento4 pagineJournal: Design Notes On The Resistance-Capacity Oscillator CircuitValcesarNessuna valutazione finora
- Reconfigurable Intelligent Surfaces For Wireless Communications: Principles, Challenges, and OpportunitiesDocumento12 pagineReconfigurable Intelligent Surfaces For Wireless Communications: Principles, Challenges, and OpportunitiesRana ElshamyNessuna valutazione finora
- Elmossallamy 2020Documento13 pagineElmossallamy 2020Trần Văn VũNessuna valutazione finora
- AR Bus Bar BenefitsDocumento1 paginaAR Bus Bar BenefitsJair ArmandoNessuna valutazione finora
- SEP A Stable Election Protocol For Clustered HeterDocumento12 pagineSEP A Stable Election Protocol For Clustered HeterKHUSHI RAJNessuna valutazione finora
- Compact Size Coplanar Waveguide Bandpass Filter Design and ModelingDocumento6 pagineCompact Size Coplanar Waveguide Bandpass Filter Design and ModelingFa Mido ChemseddineNessuna valutazione finora
- Accurate Analytical Model of Winding Losses in Round Litz Wire WindingsDocumento6 pagineAccurate Analytical Model of Winding Losses in Round Litz Wire WindingsKarthik PariharNessuna valutazione finora
- No 117Documento286 pagineNo 117mocker1987Nessuna valutazione finora
- No 070Documento353 pagineNo 070mocker1987Nessuna valutazione finora
- Modelling and Predesign of Steel and Composite StructuresDocumento2 pagineModelling and Predesign of Steel and Composite Structuresmocker1987Nessuna valutazione finora
- 09 - Hikami+Shiraishi-rain Wind Induced Vibrations of Cables in Cable Stayed Bridges - JEneuDocumento10 pagine09 - Hikami+Shiraishi-rain Wind Induced Vibrations of Cables in Cable Stayed Bridges - JEneumocker1987Nessuna valutazione finora
- 11.6.1.3 Integral AbutmentsDocumento5 pagine11.6.1.3 Integral AbutmentsRodrigo FritzNessuna valutazione finora
- A Structured Approach To The Design and PDFDocumento12 pagineA Structured Approach To The Design and PDFmocker1987Nessuna valutazione finora
- Hoek Brown HistoryDocumento8 pagineHoek Brown HistoryTony ChanNessuna valutazione finora
- SBJ+ 32 C5 COW 23 RE 011 0+operation,+maintenance+and+rehabiltation+strategyDocumento93 pagineSBJ+ 32 C5 COW 23 RE 011 0+operation,+maintenance+and+rehabiltation+strategymocker1987Nessuna valutazione finora
- Simplified pile settlement prediction using hyperbolic modelDocumento14 pagineSimplified pile settlement prediction using hyperbolic modelmocker1987Nessuna valutazione finora
- Bridge Deck Loading Analysis Reading ListDocumento3 pagineBridge Deck Loading Analysis Reading Listmocker1987Nessuna valutazione finora
- JCSS Workshop On Semi-Probabilistic FEM Calculations: - Load and Material ModelsDocumento5 pagineJCSS Workshop On Semi-Probabilistic FEM Calculations: - Load and Material Modelsmocker1987Nessuna valutazione finora
- Design Post-Installed Rebar Using Anchoring or Reinforcement MethodsDocumento2 pagineDesign Post-Installed Rebar Using Anchoring or Reinforcement MethodsJacky Leong100% (1)
- Sigrist, Hackbarth 3rd Fib International Congress - 2010Documento10 pagineSigrist, Hackbarth 3rd Fib International Congress - 2010mocker1987Nessuna valutazione finora
- Road Bridges and Footbridges: Bridge Testing GuideDocumento64 pagineRoad Bridges and Footbridges: Bridge Testing Guidemocker1987Nessuna valutazione finora
- Eota TR 047 Design of Anchor Channels 2018 03Documento61 pagineEota TR 047 Design of Anchor Channels 2018 03coolkaisyNessuna valutazione finora
- Anchors Testing TR 048 Details of Tests For Post Installed Fasteners in Concrete 2016Documento27 pagineAnchors Testing TR 048 Details of Tests For Post Installed Fasteners in Concrete 2016coolkaisyNessuna valutazione finora
- Eurocode 3 ActionsDocumento158 pagineEurocode 3 ActionsKeeran Montag100% (7)
- Eota TR 049 Postinstalled Fasteners in Concrete Under Seismic Action 2016 08Documento44 pagineEota TR 049 Postinstalled Fasteners in Concrete Under Seismic Action 2016 08mocker1987Nessuna valutazione finora
- Systems For Post-Installed Rebar Connections With MortarDocumento42 pagineSystems For Post-Installed Rebar Connections With Mortarmocker1987Nessuna valutazione finora
- ETAG 001-Annex C 10-08-01Documento34 pagineETAG 001-Annex C 10-08-01jpjobduNessuna valutazione finora
- Sigrist, Hackbarth 3rd Fib International Congress - 2010Documento10 pagineSigrist, Hackbarth 3rd Fib International Congress - 2010mocker1987Nessuna valutazione finora
- Eota TR023Documento21 pagineEota TR023vanratingenNessuna valutazione finora
- Refill Instructions For TK-Fine Vario L PencilDocumento1 paginaRefill Instructions For TK-Fine Vario L Pencilmocker1987Nessuna valutazione finora
- 3Documento1 pagina3mocker1987Nessuna valutazione finora
- Shear and Flexure Limit State Design of Concrete BeamsDocumento45 pagineShear and Flexure Limit State Design of Concrete Beamsmocker1987Nessuna valutazione finora
- Objects in the LUSAS Modeller Scripting APIDocumento17 pagineObjects in the LUSAS Modeller Scripting APImocker1987Nessuna valutazione finora
- Shear and Flexure Limit State Design of Concrete BeamsDocumento45 pagineShear and Flexure Limit State Design of Concrete Beamsmocker1987Nessuna valutazione finora
- A Structured Approach To The Design and PDFDocumento12 pagineA Structured Approach To The Design and PDFmocker1987Nessuna valutazione finora
- Q3AS-351-FM3 Design Verification RegisterDocumento1 paginaQ3AS-351-FM3 Design Verification Registermocker1987Nessuna valutazione finora
- Discussion How Eurocode 7 Has Affected Geotechnical Design A ReviewDocumento3 pagineDiscussion How Eurocode 7 Has Affected Geotechnical Design A ReviewkrainajackaNessuna valutazione finora
- The Meaning of Al FatihaDocumento11 pagineThe Meaning of Al Fatihammhoward20Nessuna valutazione finora
- SDLC - Agile ModelDocumento3 pagineSDLC - Agile ModelMuhammad AkramNessuna valutazione finora
- Universitas Alumni Psikotest LolosDocumento11 pagineUniversitas Alumni Psikotest LolosPsikotes BVKNessuna valutazione finora
- Culture of BMWDocumento6 pagineCulture of BMWhk246100% (1)
- Personal Weaknesses ListDocumento3 paginePersonal Weaknesses ListKinga SzászNessuna valutazione finora
- FunambolDocumento48 pagineFunambolAmeliaNessuna valutazione finora
- The Story of Babri MasjidDocumento54 pagineThe Story of Babri MasjidKiran Penumala100% (1)
- Health Statement Form Medical Questionnaire (2M Up)Documento1 paginaHealth Statement Form Medical Questionnaire (2M Up)DECA HOMES YAKALNessuna valutazione finora
- The Republic of LOMAR Sovereignty and International LawDocumento13 pagineThe Republic of LOMAR Sovereignty and International LawRoyalHouseofRA UruguayNessuna valutazione finora
- Introduction To Vitamin C, (Chemistry STPM)Documento2 pagineIntroduction To Vitamin C, (Chemistry STPM)NarmeenNirmaNessuna valutazione finora
- Bombardier CityfloDocumento14 pagineBombardier CityfloBiju KmNessuna valutazione finora
- Wjec Gcse English Literature Coursework Mark SchemeDocumento6 pagineWjec Gcse English Literature Coursework Mark Schemef6a5mww8100% (2)
- Web Search - One People's Public Trust 1776 UCCDocumento28 pagineWeb Search - One People's Public Trust 1776 UCCVincent J. CataldiNessuna valutazione finora
- Narasimha EngDocumento33 pagineNarasimha EngSachin SinghNessuna valutazione finora
- Goan Bread Tradition Questions AnsweredDocumento2 pagineGoan Bread Tradition Questions AnsweredPreeti SharmaNessuna valutazione finora
- Infanrix Hexa RSMKL July 2023Documento37 pagineInfanrix Hexa RSMKL July 2023Bayu KurniawanNessuna valutazione finora
- Cambridge Assessment International Education: Biology 5090/61 October/November 2017Documento6 pagineCambridge Assessment International Education: Biology 5090/61 October/November 2017Zarish NoorNessuna valutazione finora
- HCF and LCMDocumento3 pagineHCF and LCMtamilanbaNessuna valutazione finora
- DRF1301 1000V 15A 30MHz MOSFET Push-Pull Hybrid DriverDocumento4 pagineDRF1301 1000V 15A 30MHz MOSFET Push-Pull Hybrid DriverAddy JayaNessuna valutazione finora
- MF 04Documento21 pagineMF 04Carlos De la CruzNessuna valutazione finora
- New Democracy June-August 2017Documento32 pagineNew Democracy June-August 2017Communist Party of India - Marxist Leninist - New DemocracyNessuna valutazione finora
- Financial MarketsDocumento323 pagineFinancial MarketsSetu Ahuja100% (2)
- Supplier Development at Honda, Nissan and ToyotaDocumento28 pagineSupplier Development at Honda, Nissan and Toyotapresidonsi100% (1)
- We Don't Eat Our: ClassmatesDocumento35 pagineWe Don't Eat Our: ClassmatesChelle Denise Gumban Huyaban85% (20)
- ESL Lesson PlanDocumento4 pagineESL Lesson PlanuarkgradstudentNessuna valutazione finora
- Science & Technology: Wireless Sensor Network and Internet of Things (Iot) Solution in AgricultureDocumento10 pagineScience & Technology: Wireless Sensor Network and Internet of Things (Iot) Solution in AgricultureSivajith SNessuna valutazione finora
- Ns5e rw3 SB Ak HyeDocumento24 pagineNs5e rw3 SB Ak HyeKeys Shield JoshuaNessuna valutazione finora
- PIC16 F 1619Documento594 paginePIC16 F 1619Francisco Martinez AlemanNessuna valutazione finora
- Lecture Notes 1-8Documento39 pagineLecture Notes 1-8Mehdi MohmoodNessuna valutazione finora
- People v Gemoya and Tionko - Supreme Court upholds murder convictionDocumento7 paginePeople v Gemoya and Tionko - Supreme Court upholds murder convictionLASNessuna valutazione finora