Potrebbero piacerti anche
- Teardowns: Learn How Electronics Work by Taking Them ApartDa EverandTeardowns: Learn How Electronics Work by Taking Them ApartNessuna valutazione finora
- Programming Arduino Next Steps: Going Further with SketchesDa EverandProgramming Arduino Next Steps: Going Further with SketchesValutazione: 3 su 5 stelle3/5 (3)
- Wiring For Yvwa ChillerDocumento28 pagineWiring For Yvwa ChillerTawanda MandazaNessuna valutazione finora
- Supreme 1200T 461-2016 - Appendix - A-OM - Manual - Spec - Section - 14451 - MixerDocumento187 pagineSupreme 1200T 461-2016 - Appendix - A-OM - Manual - Spec - Section - 14451 - MixerWest BeefNessuna valutazione finora
- User Web Page Design Tool Operating Manual: - Sw1Dnn-Wsvdt-MdDocumento52 pagineUser Web Page Design Tool Operating Manual: - Sw1Dnn-Wsvdt-MdfreitaswalterNessuna valutazione finora
- Logic Selection Guide PDFDocumento156 pagineLogic Selection Guide PDFDANIEL-COSTEL PETCUNessuna valutazione finora
- Instruction Manual For SAB110 PDFDocumento151 pagineInstruction Manual For SAB110 PDFTawanda MandazaNessuna valutazione finora
- POWSD ManualDocumento100 paginePOWSD ManualThai Tran100% (4)
- User 'S Manual: Fully Digital Stepping DriverDocumento18 pagineUser 'S Manual: Fully Digital Stepping DriverAhmed MahemoudNessuna valutazione finora
- DM442m MecheltronDocumento18 pagineDM442m MecheltronYuni MamaNessuna valutazione finora
- User 'S Manual: Fully Digital Stepping DriverDocumento17 pagineUser 'S Manual: Fully Digital Stepping DriverAndré WeillerNessuna valutazione finora
- User's Manual: Fully Digital Stepping DriverDocumento16 pagineUser's Manual: Fully Digital Stepping DriverAndré HoffNessuna valutazione finora
- User 'S Manual: Digital AC Servo DriveDocumento31 pagineUser 'S Manual: Digital AC Servo DriveWallerson AbreuNessuna valutazione finora
- Driver DM556 MDocumento17 pagineDriver DM556 MjcernudaNessuna valutazione finora
- User 'S Manual: Digital DC Servo DriverDocumento13 pagineUser 'S Manual: Digital DC Servo DriverdarkenelNessuna valutazione finora
- DM556m MecheltronDocumento16 pagineDM556m MecheltronRoger Mirano ValderramaNessuna valutazione finora
- User 'S Manual: Digital Brush DC Servo DriverDocumento25 pagineUser 'S Manual: Digital Brush DC Servo DriverErnesto AmadorNessuna valutazione finora
- User's Manual: Extremely Low Noise 3-Phase Microstepping DriverDocumento9 pagineUser's Manual: Extremely Low Noise 3-Phase Microstepping Driverdanarmuhamad21Nessuna valutazione finora
- User's Manual: High Voltage Fully Digital Stepper DriveDocumento11 pagineUser's Manual: High Voltage Fully Digital Stepper DriveLuis Otavio TrindadeNessuna valutazione finora
- User 'S Manual: Fully Digital Stepping DriverDocumento18 pagineUser 'S Manual: Fully Digital Stepping DriverAhmed MahemoudNessuna valutazione finora
- Drive Motor de Passo DM860 PDFDocumento10 pagineDrive Motor de Passo DM860 PDFAlisson laraNessuna valutazione finora
- MSDXX Manual v30Documento25 pagineMSDXX Manual v30Quý TrầnNessuna valutazione finora
- M880A User ManualDocumento10 pagineM880A User Manuallimim56582Nessuna valutazione finora
- MI Configurator Operating Manual: - Sw1Dnn-Miconf-MDocumento76 pagineMI Configurator Operating Manual: - Sw1Dnn-Miconf-MAlex ZXNessuna valutazione finora
- Fdonair: Forwardt Software PackageDocumento69 pagineFdonair: Forwardt Software PackageMitic MilanNessuna valutazione finora
- Mvi56e MCM MCMXT Um001Documento209 pagineMvi56e MCM MCMXT Um001Israel100% (1)
- Dlink dc5 ManualDocumento74 pagineDlink dc5 Manualjulius004Nessuna valutazione finora
- Lenel HardwareDocumento85 pagineLenel HardwareLumumba BandyNessuna valutazione finora
- Granvista Plus Gvp221Documento65 pagineGranvista Plus Gvp221白Muhammad Fiqri HNessuna valutazione finora
- Ovation SIS With Electronic Marshalling Safety Manual OW360 - 42Documento36 pagineOvation SIS With Electronic Marshalling Safety Manual OW360 - 42kumarNessuna valutazione finora
- Opengear User ManualDocumento248 pagineOpengear User ManualjsnNessuna valutazione finora
- Owon Xdg3000 User ManualDocumento80 pagineOwon Xdg3000 User Manualyo8rmhNessuna valutazione finora
- Hardware Installation Manual For DM805-AI: Digital Stepper Drive With Analog 0 5V InputDocumento29 pagineHardware Installation Manual For DM805-AI: Digital Stepper Drive With Analog 0 5V Inputmaicon tozatoNessuna valutazione finora
- A100K10602 Alphacom XE User GuideDocumento119 pagineA100K10602 Alphacom XE User GuideAlberto R PerezNessuna valutazione finora
- User Manual: Digital Microstep DriveDocumento17 pagineUser Manual: Digital Microstep DriveIlhami DemirNessuna valutazione finora
- CTH300 C5X Motion Controller User ManualV1.00Documento221 pagineCTH300 C5X Motion Controller User ManualV1.00Felipe OsorioNessuna valutazione finora
- GT911 Datasheet PDFDocumento25 pagineGT911 Datasheet PDFLucky ChitkaraNessuna valutazione finora
- RUT955 Manual v1 39Documento226 pagineRUT955 Manual v1 39Yuriy ShapovalovNessuna valutazione finora
- Dcs-960l A1 Manual v1.00 WWDocumento69 pagineDcs-960l A1 Manual v1.00 WWLuis Daniel Woiski GuilhermeNessuna valutazione finora
- DAQMaster EN User 180821 W PDFDocumento191 pagineDAQMaster EN User 180821 W PDFAhmadNessuna valutazione finora
- RSG2300P Hardware Installation Guide enDocumento52 pagineRSG2300P Hardware Installation Guide enFelipe MoyaNessuna valutazione finora
- MdriveDocumento104 pagineMdriveAlejandroSosaVieraNessuna valutazione finora
- DSR 250 Manual 104 en CADocumento233 pagineDSR 250 Manual 104 en CAHendrawan DarmalimNessuna valutazione finora
- FRONIUS Wire Feeder VR 7000 42,0426,0015, ENDocumento56 pagineFRONIUS Wire Feeder VR 7000 42,0426,0015, ENRobert MeglicNessuna valutazione finora
- User Web Page Design Tool Operating Manual: - Sw1Dnn-Wsvdt-MdDocumento52 pagineUser Web Page Design Tool Operating Manual: - Sw1Dnn-Wsvdt-MdfreitaswalterNessuna valutazione finora
- Pelco CM6700 Matrix Switcher-Controller Manual PDFDocumento44 paginePelco CM6700 Matrix Switcher-Controller Manual PDFOfftake SutamiNessuna valutazione finora
- User Guide For X Series HD IP Camera V2.0 PDFDocumento29 pagineUser Guide For X Series HD IP Camera V2.0 PDFtecnicoteNessuna valutazione finora
- User's Manual: 0HJD3L (HO3R (3OXV 6Shhg'Rph, Qwhuqhw&DphudDocumento109 pagineUser's Manual: 0HJD3L (HO3R (3OXV 6Shhg'Rph, Qwhuqhw&DphudMahmoud AhmedNessuna valutazione finora
- SMC6000 HMDocumento33 pagineSMC6000 HMNo KidderNessuna valutazione finora
- Hi-Target V60 GNSS RTK Receiver: User GuideDocumento55 pagineHi-Target V60 GNSS RTK Receiver: User GuidealgebraikoNessuna valutazione finora
- Apollo Aan 100 - Revj3Documento81 pagineApollo Aan 100 - Revj3Martha Roa CaicedoNessuna valutazione finora
- Oracle FLEXCUBE Universal Banking: Limits and Collateral Management User Guide Release 12.0.3.2.10Documento124 pagineOracle FLEXCUBE Universal Banking: Limits and Collateral Management User Guide Release 12.0.3.2.10MulualemNessuna valutazione finora
- Lexium 17D Series Servo Drive User Guide: ModiconDocumento182 pagineLexium 17D Series Servo Drive User Guide: ModiconRodrigo DuarteNessuna valutazione finora
- Ethernet Modbus X80 Gateway Device Type Manager: User ManualDocumento40 pagineEthernet Modbus X80 Gateway Device Type Manager: User ManualVladNessuna valutazione finora
- Autonics Daqmaster ManualDocumento210 pagineAutonics Daqmaster ManualkariemNessuna valutazione finora
- Ix T7A: Installation ManualDocumento28 pagineIx T7A: Installation ManualSidney Chaves de LimaNessuna valutazione finora
- Maintenance and Service GuideDocumento105 pagineMaintenance and Service GuidebenNessuna valutazione finora
- 11-1506 880PL - HD - ManualDocumento37 pagine11-1506 880PL - HD - Manualalejandro.ruizgNessuna valutazione finora
- E EPSONRC+UsersGuide75 r1Documento606 pagineE EPSONRC+UsersGuide75 r1IOZEF1Nessuna valutazione finora
- X Smart User Manual 1.5 ENDocumento22 pagineX Smart User Manual 1.5 ENColour IdeaNessuna valutazione finora
- OnguardDocumento698 pagineOnguardOscar Orlando Sánchez FlórezNessuna valutazione finora
- Operating ManualDocumento78 pagineOperating ManualMagureanu MihaiNessuna valutazione finora
- Ip Camera: H SeriesDocumento26 pagineIp Camera: H Series余日中Nessuna valutazione finora
- DP3CL Open Bus Step Driver ManualDocumento54 pagineDP3CL Open Bus Step Driver ManualNguyen QuanNessuna valutazione finora
- ChishonaDocumento20 pagineChishonaTawanda Mandaza100% (1)
- COMMANDER Products Data Sheet: PC Configuration SoftwareDocumento4 pagineCOMMANDER Products Data Sheet: PC Configuration SoftwareTawanda MandazaNessuna valutazione finora
- PoultryDocumento11 paginePoultryTawanda MandazaNessuna valutazione finora
- 2-Channel Counter/Frequency Module: Model ADAM-4080Documento1 pagina2-Channel Counter/Frequency Module: Model ADAM-4080Tawanda MandazaNessuna valutazione finora
- 2-Channel Counter/Frequency Module: Model ADAM-4080Documento1 pagina2-Channel Counter/Frequency Module: Model ADAM-4080Tawanda MandazaNessuna valutazione finora
- Nstrumentation N: Systems & ServicesDocumento12 pagineNstrumentation N: Systems & ServicesTawanda MandazaNessuna valutazione finora
- COMMANDER Products Data Sheet: PC Configuration SoftwareDocumento4 pagineCOMMANDER Products Data Sheet: PC Configuration SoftwareTawanda MandazaNessuna valutazione finora
- Abb C100 Im - C100 - 10 - IssDocumento60 pagineAbb C100 Im - C100 - 10 - IssTawanda MandazaNessuna valutazione finora
- Abb C 355 ControllerDocumento16 pagineAbb C 355 ControllerTawanda MandazaNessuna valutazione finora
- Dq2611m ManualDocumento7 pagineDq2611m ManualTawanda MandazaNessuna valutazione finora
- Unisab II Control Ver 2 00Documento4 pagineUnisab II Control Ver 2 00Tawanda MandazaNessuna valutazione finora
- Digital Fiberoptic Sensor FS-N SeriesDocumento6 pagineDigital Fiberoptic Sensor FS-N SeriesRaul MezaNessuna valutazione finora
- Untitled 1Documento2 pagineUntitled 1Samiul IslamNessuna valutazione finora
- AVR Memory Mapped I-ODocumento16 pagineAVR Memory Mapped I-OEmin KültürelNessuna valutazione finora
- G102 User GuideV2.3-Mobicom TelematicsDocumento18 pagineG102 User GuideV2.3-Mobicom TelematicsJeson Zhu100% (2)
- Manual - PLC XCM Motion ControllerDocumento85 pagineManual - PLC XCM Motion ControllerJose LuisNessuna valutazione finora
- Amplified Square Wave Speed SensorDocumento4 pagineAmplified Square Wave Speed Sensorfebydwi01Nessuna valutazione finora
- Motorized Electromechanical Swing Gate: Assembly and Operation ManualDocumento22 pagineMotorized Electromechanical Swing Gate: Assembly and Operation ManualNestorV8Nessuna valutazione finora
- NXR-700 800 CSI K Ver210 EN 20081231Documento74 pagineNXR-700 800 CSI K Ver210 EN 20081231Quoc MaiNessuna valutazione finora
- 74 Series Logic ICsDocumento9 pagine74 Series Logic ICsshahidali6Nessuna valutazione finora
- S4 5Documento12 pagineS4 5Fabian CaizaNessuna valutazione finora
- REN RC210xxA DST 20230601Documento59 pagineREN RC210xxA DST 20230601杉澤 佑樹Nessuna valutazione finora
- Mitsubishi Manuals 1422Documento33 pagineMitsubishi Manuals 1422ronesromualdoNessuna valutazione finora
- Technical Manual For Aasd Series Servo Drive 1 60Documento60 pagineTechnical Manual For Aasd Series Servo Drive 1 60Ali JafferyNessuna valutazione finora
- Pmac2a PC104 Axis HRMDocumento55 paginePmac2a PC104 Axis HRMhuseyintopcuNessuna valutazione finora
- Nxds 6 IDocumento24 pagineNxds 6 IПетр КрасновNessuna valutazione finora
- DNP 3Documento121 pagineDNP 3pauloheideckeNessuna valutazione finora
- E22-900T30D UserManual EN v1.2Documento25 pagineE22-900T30D UserManual EN v1.2SuhariNessuna valutazione finora
- Atx2005r10atx 2099665633Documento7 pagineAtx2005r10atx 2099665633freddyNessuna valutazione finora
- Features Description: Ultra Low Voltage Detectors PT7M6101/6102Documento9 pagineFeatures Description: Ultra Low Voltage Detectors PT7M6101/6102Bhupender SiwachNessuna valutazione finora
- Panasonic DP2 42E DatasheetDocumento15 paginePanasonic DP2 42E DatasheetJosueNessuna valutazione finora
- EH782Documento93 pagineEH782jorgeNessuna valutazione finora
- Service Manual: Board RepairDocumento173 pagineService Manual: Board RepairPaulo SilvaNessuna valutazione finora
- Features: E1 Single Chip TransceiverDocumento102 pagineFeatures: E1 Single Chip TransceiverBinh TruongNessuna valutazione finora
- Manual DigitaalDocumento68 pagineManual DigitaalAndres UmarraNessuna valutazione finora
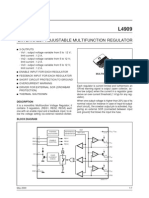
- Externally Adjustable Multifunction Regulator: DescriptionDocumento7 pagineExternally Adjustable Multifunction Regulator: DescriptionRICHIHOTS2Nessuna valutazione finora
- Hall SenzorDocumento15 pagineHall SenzorfelixmosNessuna valutazione finora
- UTMII - Rotating Torque Metter PDFDocumento40 pagineUTMII - Rotating Torque Metter PDFHuỳnh LêNessuna valutazione finora
- Yea Kaeps800000042k SGDV Ac APDocumento24 pagineYea Kaeps800000042k SGDV Ac APthanh_cdt01Nessuna valutazione finora