Potrebbero piacerti anche
- Me-20 SN PDFDocumento19 pagineMe-20 SN PDFAntonio FernandesNessuna valutazione finora
- Samsung GT-S5570 Galaxy Mini Service ManualDocumento93 pagineSamsung GT-S5570 Galaxy Mini Service ManualSerty Desck100% (1)
- Resistor Transistor LogicDocumento3 pagineResistor Transistor LogicRAJESHKUMAR SNessuna valutazione finora
- Tabela de DiodosDocumento3 pagineTabela de Diodossjx2009Nessuna valutazione finora
- 2004 Logic Selection Guide Sdyu001u c20040412Documento323 pagine2004 Logic Selection Guide Sdyu001u c20040412lxz5101Nessuna valutazione finora
- Cmos Logic DataDocumento450 pagineCmos Logic DataseleneedithNessuna valutazione finora
- Audigy 2zs Vs Audigy 2Documento1 paginaAudigy 2zs Vs Audigy 2calitoswayNessuna valutazione finora
- Section16 PDFDocumento33 pagineSection16 PDFRoozbeh BahmanyarNessuna valutazione finora
- W2a SMD Transistor PDFDocumento86 pagineW2a SMD Transistor PDFMahmoued YasinNessuna valutazione finora
- SCSI Internal Pinout Diagram at PinoutsDocumento3 pagineSCSI Internal Pinout Diagram at PinoutsNabendu Ghosh0% (1)
- Lista de Equivalência de Transistor Da Serie 2sa9xxDocumento4 pagineLista de Equivalência de Transistor Da Serie 2sa9xxVieira BrunoNessuna valutazione finora
- Pdfslide - Tips Persamaan TransistorDocumento6 paginePdfslide - Tips Persamaan TransistorLord BoyNessuna valutazione finora
- Zener Diode Cross Reference ListingDocumento6 pagineZener Diode Cross Reference ListingあいうえおかきくけこNessuna valutazione finora
- 1W STEREO KA2209 AMPLIFIER MODULE (3087v2) PDFDocumento3 pagine1W STEREO KA2209 AMPLIFIER MODULE (3087v2) PDFAlberto MoscosoNessuna valutazione finora
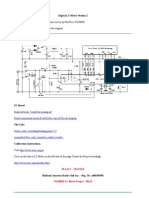
- Digital LC Meter Version 2Documento3 pagineDigital LC Meter Version 2geraldino250Nessuna valutazione finora
- Ka2206B 2.3W Dual Audio Power Amp: O CC L O CC LDocumento4 pagineKa2206B 2.3W Dual Audio Power Amp: O CC L O CC LEdgar Robert DolarNessuna valutazione finora
- Aiwa NSX A888 S888Documento9 pagineAiwa NSX A888 S888Sabastian NakaiNessuna valutazione finora
- BK4811B Datasheet V1.2Documento37 pagineBK4811B Datasheet V1.2BradMorse50% (2)
- Philips Cd104 Service ManualDocumento86 paginePhilips Cd104 Service ManualRick NastiNessuna valutazione finora
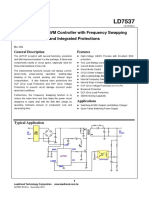
- LD 7537 - Controlador PWMDocumento16 pagineLD 7537 - Controlador PWMTiago LeonhardtNessuna valutazione finora
- Dual Mic Pre Schematic - SSM2017-Based, But INA217 & THAT1510 Are Possible Subs - Kevin Ross Celestial - ComauDocumento1 paginaDual Mic Pre Schematic - SSM2017-Based, But INA217 & THAT1510 Are Possible Subs - Kevin Ross Celestial - ComaucrackintheshatNessuna valutazione finora
- Data SheetDocumento66 pagineData Sheetalexis366Nessuna valutazione finora
- WK3700Documento33 pagineWK3700barryhernsNessuna valutazione finora
- Samsung Max-Zs720 GDocumento22 pagineSamsung Max-Zs720 Ganon_33544164Nessuna valutazione finora
- NiMh and NiCd Battery Charger Circuit Circuit Diagram and InstructionsDocumento1 paginaNiMh and NiCd Battery Charger Circuit Circuit Diagram and InstructionsdewasuryantoNessuna valutazione finora
- Newlester PhilipsDocumento49 pagineNewlester PhilipsCarlos D MauroNessuna valutazione finora
- NS-BP112/NS-BP102 CRX-B370/CRX-B370D: MCR-B370/MCR-B270/ MCR-B370D/MCR-B270DDocumento65 pagineNS-BP112/NS-BP102 CRX-B370/CRX-B370D: MCR-B370/MCR-B270/ MCR-B370D/MCR-B270DVicente Fernandez100% (1)
- Sherman Filter Bank ManualDocumento56 pagineSherman Filter Bank Manualstony74Nessuna valutazione finora
- Introduction To Sigma Delta ConvertersDocumento72 pagineIntroduction To Sigma Delta Convertershjtseng1974100% (1)
- Diagramma ZED12FX 16FX 22FXUGDocumento1 paginaDiagramma ZED12FX 16FX 22FXUGgiovanniricciardiNessuna valutazione finora
- DL135 D PDFDocumento1.422 pagineDL135 D PDFdexterconexionNessuna valutazione finora
- EVS. Technical Reference XT Hardware Issue3.EnglishDocumento56 pagineEVS. Technical Reference XT Hardware Issue3.EnglishiscrbdiNessuna valutazione finora
- MM B7Documento24 pagineMM B7nangelianNessuna valutazione finora
- DSPDocumento104 pagineDSPTần LongNessuna valutazione finora
- LP154WX4 TlabDocumento31 pagineLP154WX4 TlabsuzukkNessuna valutazione finora
- Sony MZ-R900 Service ManualDocumento50 pagineSony MZ-R900 Service ManualSam NixonNessuna valutazione finora
- Logic Cross Reference HandbookDocumento313 pagineLogic Cross Reference Handbookbesttv046936Nessuna valutazione finora
- Alinco DR-150 Service ManualDocumento44 pagineAlinco DR-150 Service ManualYayok S. Anggoro100% (4)
- Ic-7400 SM 3Documento84 pagineIc-7400 SM 3Luciano HoraNessuna valutazione finora
- Baa-Baa DistortionDocumento1 paginaBaa-Baa DistortionCah KampoengsNessuna valutazione finora
- MPC1000 ServManualDocumento22 pagineMPC1000 ServManualAdrian DuMayNessuna valutazione finora
- DIY SynthDocumento8 pagineDIY SynthFernando Palomera HualamánNessuna valutazione finora
- Monotribe SchematicDocumento1 paginaMonotribe Schematicdse666100% (1)
- Basic Capacitor FormulasDocumento1 paginaBasic Capacitor FormulasvasiliyNessuna valutazione finora
- Microchip dsPIC30F2020 SMPS DatasheetDocumento286 pagineMicrochip dsPIC30F2020 SMPS DatasheetMarlon MoscosoNessuna valutazione finora
- SHARP CD-Q8X Service ManualDocumento48 pagineSHARP CD-Q8X Service ManualavrelecNessuna valutazione finora
- TF 117 Circuit DiagramDocumento9 pagineTF 117 Circuit DiagramFrancis TaisantNessuna valutazione finora
- Andy Mp3 Player SchematicsDocumento1 paginaAndy Mp3 Player SchematicsSiddhant UtekarNessuna valutazione finora
- CTK 4000Documento26 pagineCTK 4000JorgeBaquéNessuna valutazione finora
- Boss RV 5 Digital Reverb SchematicDocumento1 paginaBoss RV 5 Digital Reverb Schematictofu157Nessuna valutazione finora
- Panasonic Cq-Ts7471a (Toyota) Service ManualDocumento35 paginePanasonic Cq-Ts7471a (Toyota) Service ManualbukopilaplNessuna valutazione finora
- Thank You For Your Interest in Our SchematicsDocumento2 pagineThank You For Your Interest in Our SchematicsadyhansoloNessuna valutazione finora
- Alesis Microverb 4 Service ManualDocumento10 pagineAlesis Microverb 4 Service ManualJorge Sánchez RodríguezNessuna valutazione finora
- A Presentation On Microcontroller 8051Documento22 pagineA Presentation On Microcontroller 8051Praveen ShrivastavaNessuna valutazione finora
- 8051 Microcontroller: Chapter - 2Documento58 pagine8051 Microcontroller: Chapter - 2nebyuNessuna valutazione finora
- Unit 4 ADocumento50 pagineUnit 4 ASahil SinghNessuna valutazione finora
- Reference: The 8051 Microcontroller: Architecture, Programming & Applications by Kenneth J. AyalaDocumento27 pagineReference: The 8051 Microcontroller: Architecture, Programming & Applications by Kenneth J. Ayalasachin rawatNessuna valutazione finora
- Data RFDocumento63 pagineData RFmgitecetechNessuna valutazione finora
- Unit-Iv The 8051 Architecture Contents at A GlanceDocumento28 pagineUnit-Iv The 8051 Architecture Contents at A GlanceKushwanth KaramsettiNessuna valutazione finora
- Introduction To 8051: Presented by:-SAHIL SINGLA (151001) ADITYA THAKUR (151002)Documento16 pagineIntroduction To 8051: Presented by:-SAHIL SINGLA (151001) ADITYA THAKUR (151002)Aditya ThakurNessuna valutazione finora
- Sustainability 07 12359Documento13 pagineSustainability 07 12359Sanjoy PanditNessuna valutazione finora
- 69th PCC MinutesDocumento61 pagine69th PCC MinutesSanjoy PanditNessuna valutazione finora
- An Introduction About WaveletDocumento18 pagineAn Introduction About WaveletMimi PhuongNessuna valutazione finora
- Prezentacija Fuzzy Inference SystemsDocumento18 paginePrezentacija Fuzzy Inference SystemsruzmirNessuna valutazione finora
- 72nd PCC MinutesDocumento71 pagine72nd PCC MinutesSanjoy PanditNessuna valutazione finora
- Multi JerarquicoDocumento23 pagineMulti JerarquicoCesario GillasNessuna valutazione finora
- Get PDFDocumento6 pagineGet PDFzahraayiNessuna valutazione finora
- 68PCCMINUTESDocumento110 pagine68PCCMINUTESSanjoy PanditNessuna valutazione finora
- 67PCCMINUTESDocumento46 pagine67PCCMINUTESSanjoy PanditNessuna valutazione finora
- 71st PCC MinutesDocumento77 pagine71st PCC MinutesSanjoy PanditNessuna valutazione finora
- 73rd PCC MinutesDocumento74 pagine73rd PCC MinutesSanjoy PanditNessuna valutazione finora
- 70PCCMINUTESDocumento70 pagine70PCCMINUTESSanjoy PanditNessuna valutazione finora
- AE Elect Civil Mech IT&C Mpp-2019-03Documento13 pagineAE Elect Civil Mech IT&C Mpp-2019-03Rohit KumarNessuna valutazione finora
- Solar PV Water PumpingDocumento13 pagineSolar PV Water PumpingSanjoy PanditNessuna valutazione finora
- 54th PCC Minutes - Final - Website Version - 07.01.2020Documento67 pagine54th PCC Minutes - Final - Website Version - 07.01.2020Sanjoy PanditNessuna valutazione finora
- Differential ProtectionDocumento2 pagineDifferential ProtectionSanjoy PanditNessuna valutazione finora
- Fault EventDocumento1 paginaFault EventSanjoy PanditNessuna valutazione finora
- ATMEL MCS 8051 Instruct SetDocumento50 pagineATMEL MCS 8051 Instruct Setand3botNessuna valutazione finora
- Estimation of Fault Resistance From Fault Recording Data: Daniel Wong & Michael Tong 2014-November-5Documento28 pagineEstimation of Fault Resistance From Fault Recording Data: Daniel Wong & Michael Tong 2014-November-5cg7316Nessuna valutazione finora
- CrakerDocumento1 paginaCrakerSanjoy PanditNessuna valutazione finora
- Graph Theory and Algorithms Assignment 1: ×M Matrix. Consider A Graph G Whose Vertices Are The EntriesDocumento2 pagineGraph Theory and Algorithms Assignment 1: ×M Matrix. Consider A Graph G Whose Vertices Are The EntriesSanjoy PanditNessuna valutazione finora
- PCC ReportDocumento11 paginePCC ReportSanjoy PanditNessuna valutazione finora
- 65pccminutes PDFDocumento49 pagine65pccminutes PDFSanjoy PanditNessuna valutazione finora
- Problem 5, Page 9.: Math 368. Combinatorics and Graph Theory. Fall 2012Documento1 paginaProblem 5, Page 9.: Math 368. Combinatorics and Graph Theory. Fall 2012Sanjoy PanditNessuna valutazione finora
- Directed Graph 1Documento17 pagineDirected Graph 1Sanjoy PanditNessuna valutazione finora
- Graph Theory by Tero HarjuDocumento99 pagineGraph Theory by Tero HarjuabelousNessuna valutazione finora
- Solutions To Problem Set 7Documento2 pagineSolutions To Problem Set 7Sanjoy PanditNessuna valutazione finora
- 5 Directed Graphs: What Is A Directed Graph?Documento9 pagine5 Directed Graphs: What Is A Directed Graph?Sanjoy PanditNessuna valutazione finora
- Distance Protection ApplicationDocumento12 pagineDistance Protection Applicationluiscamposch50% (2)
- Final Report On Staad ProDocumento36 pagineFinal Report On Staad ProPangerwati Ozukum90% (10)
- Microsoft Lumia 950 XL - Unlocked (Black)Documento8 pagineMicrosoft Lumia 950 XL - Unlocked (Black)Dawood AhmedNessuna valutazione finora
- V9.4 Patch InstallDocumento5 pagineV9.4 Patch InstallmbsahgNessuna valutazione finora
- DB100 Manual (KIMO)Documento2 pagineDB100 Manual (KIMO)Hamza WidadiNessuna valutazione finora
- 1.daftar Harga Suku CadangDocumento2 pagine1.daftar Harga Suku CadangCahyadi AndhikaNessuna valutazione finora
- Data Protection GDPRE Short Version 5 2021Documento49 pagineData Protection GDPRE Short Version 5 2021anees kausarNessuna valutazione finora
- Digital Ethiopia 2025 - A Strategy For Ethiopia Inclusive ProsperityDocumento155 pagineDigital Ethiopia 2025 - A Strategy For Ethiopia Inclusive Prosperityace187Nessuna valutazione finora
- SPD Compatible Pedals: SM-SH51 SM-SH55Documento1 paginaSPD Compatible Pedals: SM-SH51 SM-SH55Bernardo LizardiNessuna valutazione finora
- D73244GC20 SGDocumento316 pagineD73244GC20 SGDjebrani AzizNessuna valutazione finora
- Senior ListDocumento25 pagineSenior ListFELIX VINCENT BOMPATNessuna valutazione finora
- WEG Motor Scan Gateway Cassia X1000 Manual 10008451731 PT en EsDocumento74 pagineWEG Motor Scan Gateway Cassia X1000 Manual 10008451731 PT en EsMiguel LunaNessuna valutazione finora
- PS3 CECH - 3001A+B - (160GB 320GB) ManualDocumento40 paginePS3 CECH - 3001A+B - (160GB 320GB) ManualJose RodriguezNessuna valutazione finora
- Passive Cash Cow 2020Documento19 paginePassive Cash Cow 2020dineronline50% (4)
- Manual de Bop Doble RamDocumento30 pagineManual de Bop Doble RamAndres Paul (paultgt)Nessuna valutazione finora
- Ankit ResumeDocumento3 pagineAnkit ResumeSaurabh VarshneyNessuna valutazione finora
- LCPC Assessment Form 001 ADocumento1 paginaLCPC Assessment Form 001 ABarangay MukasNessuna valutazione finora
- Microcontroller Based Line Differential Protection For Ofc IJERTV2IS111220Documento4 pagineMicrocontroller Based Line Differential Protection For Ofc IJERTV2IS111220AnilNessuna valutazione finora
- Raw Data Extract: Pay ReportDocumento12 pagineRaw Data Extract: Pay ReportAditya AnandNessuna valutazione finora
- PC1046Documento15 paginePC1046Sharafat KabirNessuna valutazione finora
- Tubesheet LayoutDocumento5 pagineTubesheet LayoutMehta MehulNessuna valutazione finora
- U-C RT B M: Harge Attery OduleDocumento24 pagineU-C RT B M: Harge Attery OduleFiel A'nNessuna valutazione finora
- Program: 5: Write A Program To Implement and Find Class, Network ID and Host ID From Given IPV4 AddressDocumento5 pagineProgram: 5: Write A Program To Implement and Find Class, Network ID and Host ID From Given IPV4 AddressAbhishek PanwarNessuna valutazione finora
- G Force InstructionsDocumento17 pagineG Force Instructions주형준Nessuna valutazione finora
- CE417 - CE Laws Ethics and Contracts - ISO Syllabus For 2ndsem 2022 2023 GRACE BABADocumento21 pagineCE417 - CE Laws Ethics and Contracts - ISO Syllabus For 2ndsem 2022 2023 GRACE BABAKlausmene AveriaNessuna valutazione finora
- Gas Measuring and Alarm Systems: Exdetector Hc-100Documento7 pagineGas Measuring and Alarm Systems: Exdetector Hc-100joseNessuna valutazione finora
- Catalog Lampu PijarDocumento32 pagineCatalog Lampu PijarMuhammad Nuryaqin Pratama PutraNessuna valutazione finora
- Management of Contractors ProcedureDocumento2 pagineManagement of Contractors ProcedurednmuleNessuna valutazione finora
- Benchmark H4000 Hotplate Stirrer Instruction ManualDocumento1 paginaBenchmark H4000 Hotplate Stirrer Instruction ManualKenneth SaganNessuna valutazione finora
- LightCastle Partners Bangladesh Startup Ecosystem Report 2021 1Documento33 pagineLightCastle Partners Bangladesh Startup Ecosystem Report 2021 1Dibakar DasNessuna valutazione finora
- Carleton University: Sysc 4600 Digital Communications Fall 2016Documento2 pagineCarleton University: Sysc 4600 Digital Communications Fall 2016essper61Nessuna valutazione finora