Potrebbero piacerti anche
- ELP332 SecCyc 23-24 1Documento15 pagineELP332 SecCyc 23-24 1satyamsinghgour2002Nessuna valutazione finora
- Synchronous Machine TestsDocumento10 pagineSynchronous Machine TestsItalo ChiarellaNessuna valutazione finora
- (P1) Modul DC Motor Speed Control SystemDocumento13 pagine(P1) Modul DC Motor Speed Control SystemTito Bambang Priambodo - 6726Nessuna valutazione finora
- Induction Motor SimulationDocumento8 pagineInduction Motor SimulationSalah RiahiNessuna valutazione finora
- DC Motor Speed Control System - ED4400BDocumento14 pagineDC Motor Speed Control System - ED4400BDanang Pradika Purnomo100% (1)
- Lab 3 Squirrel Cage Induction Machine-1Documento8 pagineLab 3 Squirrel Cage Induction Machine-1max100% (1)
- DC Machines Lab ManualDocumento153 pagineDC Machines Lab ManualdaluNessuna valutazione finora
- Induction MatlabDocumento12 pagineInduction Matlabgrido002Nessuna valutazione finora
- Electrical and Electronics Lab Manual For Mechanical EngineeringDocumento21 pagineElectrical and Electronics Lab Manual For Mechanical EngineeringSreerag Kunnathu SugathanNessuna valutazione finora
- 2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control MethodDocumento4 pagine2 - To Study The Speed Control of DC Shunt Motor by Armature Control and Field Control Methodbhavesh1863100% (1)
- ELG3311 Lab 6Documento5 pagineELG3311 Lab 6Nabeel MosawedNessuna valutazione finora
- Retardation TestDocumento53 pagineRetardation Testkiran_y2100% (9)
- Voltage Regulation of alternator-EMF, MMF - ZPF-Expt-7Documento7 pagineVoltage Regulation of alternator-EMF, MMF - ZPF-Expt-7Gingka HaganeNessuna valutazione finora
- Jabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentDocumento63 pagineJabalpur Engineering College, Jabalpur Electrical Engineering Department AC/DC Drives Lab. List of ExperimentSajalNessuna valutazione finora
- EECS Lab Manual For IV ECE R2013Documento66 pagineEECS Lab Manual For IV ECE R2013keshav315Nessuna valutazione finora
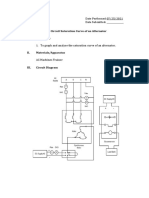
- Open Circuit Saturation Curve of An Alternator I. ObjectivesDocumento4 pagineOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezNessuna valutazione finora
- 637 - 2024 Lab-4 Induction MachinesDocumento12 pagine637 - 2024 Lab-4 Induction Machineseren.alliNessuna valutazione finora
- Three-Phase Induction MotorDocumento10 pagineThree-Phase Induction MotorMadarwi SarwaNessuna valutazione finora
- Capacitor Start/Run Induction Motor LabDocumento9 pagineCapacitor Start/Run Induction Motor LabMarcos Roberto ReinertNessuna valutazione finora
- Servo ED 4R Instruction ManualDocumento68 pagineServo ED 4R Instruction Manual1301041019Nessuna valutazione finora
- Electrical Machines-I Lab Manual R16 Modified PDFDocumento83 pagineElectrical Machines-I Lab Manual R16 Modified PDFsk ibrahimNessuna valutazione finora
- Experiment 3Documento10 pagineExperiment 3عبدالعزيز شقحانNessuna valutazione finora
- EEET103 Lab 07Documento5 pagineEEET103 Lab 07محمد الحديNessuna valutazione finora
- Lab 12Documento7 pagineLab 12Youssef ZIDANINessuna valutazione finora
- 8-DC MotorsDocumento4 pagine8-DC MotorsKrishna Chaitanya ArumallaNessuna valutazione finora
- Speed ControlDocumento10 pagineSpeed Controlعبدالله قيس محمود الحيدريNessuna valutazione finora
- Control System Lab Manual (EE-324-FDocumento52 pagineControl System Lab Manual (EE-324-FMohammad Umar RehmanNessuna valutazione finora
- Electrical Machine & InstrumentationDocumento34 pagineElectrical Machine & InstrumentationJeremy HensleyNessuna valutazione finora
- Lab 3Documento7 pagineLab 3jisteeleNessuna valutazione finora
- Dcservo NewkitDocumento11 pagineDcservo NewkitNikita MalikNessuna valutazione finora
- Jawaharlal Nehru Engineering College: Laboratory ManualDocumento36 pagineJawaharlal Nehru Engineering College: Laboratory Manualprathap kumarNessuna valutazione finora
- Control 3-Phase AC Drive with DSPDocumento5 pagineControl 3-Phase AC Drive with DSPaman srivastavaNessuna valutazione finora
- Lab 4 - DC Motor Tachometer: ObjectiveDocumento8 pagineLab 4 - DC Motor Tachometer: Objectiveswagato deyNessuna valutazione finora
- Experiment 3Documento7 pagineExperiment 3NUR SYAFIQAH BINTI MOHD SHAHIR STUDENTNessuna valutazione finora
- 4.5 Energy Performance Assessment of Motors / Variable Speed DrivesDocumento24 pagine4.5 Energy Performance Assessment of Motors / Variable Speed DrivesranveerNessuna valutazione finora
- DC Machine 1Documento5 pagineDC Machine 1Euzziel EclarinalNessuna valutazione finora
- Grid-Connected Induction Generator - 2021Documento8 pagineGrid-Connected Induction Generator - 2021Game PlayNessuna valutazione finora
- Electrical AC Machines-1 Lab Load TestDocumento3 pagineElectrical AC Machines-1 Lab Load TestKavita DhamalNessuna valutazione finora
- Expt 6 The Cage Rotor Induction MotorDocumento5 pagineExpt 6 The Cage Rotor Induction MotorRyan De GuzmanNessuna valutazione finora
- ELEC30x0 Lab8Documento6 pagineELEC30x0 Lab8Lûtwàmä JôëNessuna valutazione finora
- Synchronous Motor Test TestDocumento5 pagineSynchronous Motor Test TestChidamparam PalaniyappanNessuna valutazione finora
- EEE363 (Exp 10) Study of The Operating Characteristics and Torque Speed Relationship of Capacitor Start Motor & Run MotorDocumento8 pagineEEE363 (Exp 10) Study of The Operating Characteristics and Torque Speed Relationship of Capacitor Start Motor & Run Motorsalad.ass420420Nessuna valutazione finora
- Induction Machines and Synchronous Machines Lab - Cycle 1Documento20 pagineInduction Machines and Synchronous Machines Lab - Cycle 1SalmanNessuna valutazione finora
- Drives and Control Lab ManualDocumento36 pagineDrives and Control Lab ManualKabilanNessuna valutazione finora
- Electrical Motors and LightingDocumento77 pagineElectrical Motors and Lightinghami2pkNessuna valutazione finora
- Troubleshooting Guide for 12V14 TAG Engine Fuel Injection SystemDocumento10 pagineTroubleshooting Guide for 12V14 TAG Engine Fuel Injection SystemAadarsh ReddyNessuna valutazione finora
- DC Motor Speed & Loss AnalysisDocumento14 pagineDC Motor Speed & Loss AnalysisRusyaidi UmarNessuna valutazione finora
- Synchronizing a Three Phase Synchronous GeneratorDocumento5 pagineSynchronizing a Three Phase Synchronous GeneratorShameen MazharNessuna valutazione finora
- Simulations of Induction Machine BehaviourDocumento10 pagineSimulations of Induction Machine BehaviourorcunNessuna valutazione finora
- Synchronous MachineDocumento51 pagineSynchronous MachineahmmsayemNessuna valutazione finora
- (Rev) Lab Activity 3Documento6 pagine(Rev) Lab Activity 3MitzOsorioNessuna valutazione finora
- Maximizing Motor Efficiency at Industrial PlantsDocumento66 pagineMaximizing Motor Efficiency at Industrial PlantsAerwin Bautista100% (1)
- The DC Series Motor: Electrical and Electronics Engineering DepartmentDocumento10 pagineThe DC Series Motor: Electrical and Electronics Engineering DepartmentJOHN RYAN GUINANAONessuna valutazione finora
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDa EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNessuna valutazione finora
- Variable Speed AC Drives with Inverter Output FiltersDa EverandVariable Speed AC Drives with Inverter Output FiltersNessuna valutazione finora
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsDa EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsValutazione: 3.5 su 5 stelle3.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Valutazione: 2.5 su 5 stelle2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Da EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Nessuna valutazione finora
- Operational Amplifier Circuits: Analysis and DesignDa EverandOperational Amplifier Circuits: Analysis and DesignValutazione: 4.5 su 5 stelle4.5/5 (2)
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlDa EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlValutazione: 5 su 5 stelle5/5 (1)
- Troubleshooting Induction MotorsDocumento14 pagineTroubleshooting Induction MotorsImelda LadrilloNessuna valutazione finora
- Transient Recovery Voltage Across An Opening Circuit BreakerDocumento3 pagineTransient Recovery Voltage Across An Opening Circuit BreakertrebeardNessuna valutazione finora
- MODEL 2785502: Resolver To Encoder Converter With Hall Effect Simulation For Motor Control ApplicationsDocumento7 pagineMODEL 2785502: Resolver To Encoder Converter With Hall Effect Simulation For Motor Control ApplicationstrebeardNessuna valutazione finora
- Electric LightingDocumento10 pagineElectric LightingSarah FrazierNessuna valutazione finora
- Induction MotorDocumento10 pagineInduction Motoreng_mhassan1Nessuna valutazione finora
- Pre-Lab Due Before Performing The Experiment: Induction Motor DC GenerationDocumento11 paginePre-Lab Due Before Performing The Experiment: Induction Motor DC GenerationtrebeardNessuna valutazione finora
- Motor Load and Efficiency PDFDocumento16 pagineMotor Load and Efficiency PDFwfjerrNessuna valutazione finora
- Identification of Induction Motor Parameters from Transient TestsDocumento6 pagineIdentification of Induction Motor Parameters from Transient TeststrebeardNessuna valutazione finora
- Starting Methods of 3-Phase Induction MotorsDocumento30 pagineStarting Methods of 3-Phase Induction MotorsThilina Dhanushka GuluwitaNessuna valutazione finora
- Electric Motor Energy and Reliability Analysis PDFDocumento15 pagineElectric Motor Energy and Reliability Analysis PDFtrebeardNessuna valutazione finora
- UtilityDocumento8 pagineUtilityAmit JainNessuna valutazione finora
- Efficiency Testing of Electric Induction MotorsDocumento10 pagineEfficiency Testing of Electric Induction Motorslbk50Nessuna valutazione finora
- Electrical Motor DiagnosticsDocumento7 pagineElectrical Motor DiagnosticstrebeardNessuna valutazione finora
- 352 MantillaDocumento5 pagine352 Mantillaயுவராஜ் ஜோதிலிங்கம்Nessuna valutazione finora
- Motor Shaft Misalignment Versus Efficiency AnalysisDocumento8 pagineMotor Shaft Misalignment Versus Efficiency AnalysistrebeardNessuna valutazione finora
- AC Induction Motor FundamentalsDocumento24 pagineAC Induction Motor Fundamentalsrohtahir100% (3)
- X24164 16K 2048 X 8 Bit: Preliminary InformationDocumento14 pagineX24164 16K 2048 X 8 Bit: Preliminary InformationtrebeardNessuna valutazione finora
- Test Fixtures: Device Compatibility 3323A 3327 8006 8007 8008 8009Documento2 pagineTest Fixtures: Device Compatibility 3323A 3327 8006 8007 8008 8009trebeardNessuna valutazione finora
- Pressure Vessel Design For Engineering Plastics: Hoop Stress May NotDocumento3 paginePressure Vessel Design For Engineering Plastics: Hoop Stress May NotStanley PeterNessuna valutazione finora
- Hoop Stress Calculations in Plastic Tubing and Pipe: P (R - 1) 2 or S S P (D - T) 2tDocumento1 paginaHoop Stress Calculations in Plastic Tubing and Pipe: P (R - 1) 2 or S S P (D - T) 2ttrebeardNessuna valutazione finora
- Perspective On Connector ReliabilityDocumento28 paginePerspective On Connector ReliabilitytrebeardNessuna valutazione finora
- The Three Point Bend Test: 1 Beam TheoryDocumento2 pagineThe Three Point Bend Test: 1 Beam TheoryarthozNessuna valutazione finora
- Use A Linear Potentiometer To Create A NonlinearDocumento4 pagineUse A Linear Potentiometer To Create A NonlineartrebeardNessuna valutazione finora
- Web Class 6 FinalDocumento40 pagineWeb Class 6 FinalLina ShakirNessuna valutazione finora
- Tensile and Flexural Properties of Single Carbon FibresDocumento10 pagineTensile and Flexural Properties of Single Carbon FibrestrebeardNessuna valutazione finora
- Pomona: Model 5223 Triaxial Cable Assembly Male Both Ends, 3 LugDocumento2 paginePomona: Model 5223 Triaxial Cable Assembly Male Both Ends, 3 LugtrebeardNessuna valutazione finora
- Measuring volume and surface resistivity of dielectric materialsDocumento4 pagineMeasuring volume and surface resistivity of dielectric materialsamal gainNessuna valutazione finora
- SMLA Encoder With Segmented Ring For Large Shafts and Inaccessible AreasDocumento1 paginaSMLA Encoder With Segmented Ring For Large Shafts and Inaccessible AreastrebeardNessuna valutazione finora
- Conversion Table For Electroplating: Application NotesDocumento1 paginaConversion Table For Electroplating: Application NotestrebeardNessuna valutazione finora
- HP 16047A, B, C, 10648A, B, C, 16034B, 16023B Operating NoteDocumento28 pagineHP 16047A, B, C, 10648A, B, C, 16034B, 16023B Operating NotetrebeardNessuna valutazione finora
- Nob Tool CatalogueDocumento2 pagineNob Tool CatalogueFoton y JacNessuna valutazione finora
- Stheory Balagtas Activity Lesson 15Documento6 pagineStheory Balagtas Activity Lesson 15xVlad LedesmaNessuna valutazione finora
- C34 January 2014 (IAL)Documento44 pagineC34 January 2014 (IAL)SandyDavidNessuna valutazione finora
- Primary Reformer TubesDocumento10 paginePrimary Reformer TubesAhmed ELmlahyNessuna valutazione finora
- Common MisconceptionsDocumento7 pagineCommon MisconceptionsBoazz750Nessuna valutazione finora
- The Iec GooseDocumento2 pagineThe Iec GooseGalo VacaNessuna valutazione finora
- A-019730-1647416754604-137865-W.M.Supun Anjana DSADocumento175 pagineA-019730-1647416754604-137865-W.M.Supun Anjana DSADishan SanjayaNessuna valutazione finora
- Astrology, Believe It or Not - OCRDocumento155 pagineAstrology, Believe It or Not - OCRShashwat Singh Pokharel100% (2)
- Deep Learning: Huawei AI Academy Training MaterialsDocumento47 pagineDeep Learning: Huawei AI Academy Training Materialsfadhil muhammad hanafiNessuna valutazione finora
- DMTH505 Measure Theorey and Functional Analysis PDFDocumento349 pagineDMTH505 Measure Theorey and Functional Analysis PDFJahir Uddin LaskarNessuna valutazione finora
- 2 Power System and Stability (Read-Only)Documento17 pagine2 Power System and Stability (Read-Only)Avik PoudelNessuna valutazione finora
- CE 308 Plain and Reinforced Concrete - Ii Determination of Size, Spacing and Cover in Reinforced Concrete Slab by Cover MeterDocumento9 pagineCE 308 Plain and Reinforced Concrete - Ii Determination of Size, Spacing and Cover in Reinforced Concrete Slab by Cover MeterumairNessuna valutazione finora
- Lumion PRO 5Documento6 pagineLumion PRO 5paparock34Nessuna valutazione finora
- Model SRX-101A: Operation ManualDocumento31 pagineModel SRX-101A: Operation ManualSebastian SamolewskiNessuna valutazione finora
- Components of A BarrageDocumento21 pagineComponents of A BarrageEngr.Hamid Ismail CheemaNessuna valutazione finora
- Shipboard: Micrpoclimate' Coolin SysemsDocumento47 pagineShipboard: Micrpoclimate' Coolin Sysemsjakalae5263Nessuna valutazione finora
- NETZSCH NEMO BY Pumps USADocumento2 pagineNETZSCH NEMO BY Pumps USAWawan NopexNessuna valutazione finora
- Eaton 290376 NZMH4 VE800 S1 en - GBDocumento10 pagineEaton 290376 NZMH4 VE800 S1 en - GBkarthik01heroNessuna valutazione finora
- 4-1 E Handbook 2013-14Documento53 pagine4-1 E Handbook 2013-14Siva Reddy KunduruNessuna valutazione finora
- The Chemistry of Gemstone Colours 2016Documento1 paginaThe Chemistry of Gemstone Colours 2016Lukau João PedroNessuna valutazione finora
- Mini Project FormatDocumento5 pagineMini Project Formatriteshrajput078Nessuna valutazione finora
- English ThesisDocumento112 pagineEnglish ThesisMaria Teresa OndoyNessuna valutazione finora
- Service Repair Manual - (Cat) Caterpillar 3126 Machine Engine SN 1bw, 55kDocumento1.094 pagineService Repair Manual - (Cat) Caterpillar 3126 Machine Engine SN 1bw, 55kLen Wal100% (2)
- EECIM01 Course MaterialDocumento90 pagineEECIM01 Course Materialsmahesh_1980Nessuna valutazione finora
- 034 PhotogrammetryDocumento19 pagine034 Photogrammetryparadoja_hiperbolicaNessuna valutazione finora
- Celda Carga - KIS-2BA - 5KNDocumento4 pagineCelda Carga - KIS-2BA - 5KNJosé TimanáNessuna valutazione finora
- 913-2174-01 - Ibypass VHD User Guide Version 1.5 - Revh - VanphDocumento218 pagine913-2174-01 - Ibypass VHD User Guide Version 1.5 - Revh - Vanphpham hai van100% (1)
- Sampling, Testing, and Analysis of Asphalt Roll Roofing, Cap Sheets, and Shingles Used in Roofing and WaterproofingDocumento13 pagineSampling, Testing, and Analysis of Asphalt Roll Roofing, Cap Sheets, and Shingles Used in Roofing and WaterproofingLuigi HernándezNessuna valutazione finora
- Module 6 The HypothesisDocumento14 pagineModule 6 The HypothesisJester Guballa de LeonNessuna valutazione finora
- Mobile GIS Platforms and Applications with ArcGISDocumento28 pagineMobile GIS Platforms and Applications with ArcGISZachary Perkins100% (1)