Potrebbero piacerti anche
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsDa EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNessuna valutazione finora
- Speed Control of DC Motor Using Pid ControllerDocumento20 pagineSpeed Control of DC Motor Using Pid ControllerBUBUNNessuna valutazione finora
- Control of DC Motor Using Different Control StrategiesDa EverandControl of DC Motor Using Different Control StrategiesNessuna valutazione finora
- PID Speed Control of DC Motor Using MicrocontrollerDocumento7 paginePID Speed Control of DC Motor Using MicrocontrollerGias NawariNessuna valutazione finora
- MX4000/6000 Dual: 4550 193 80281 Revision ADocumento31 pagineMX4000/6000 Dual: 4550 193 80281 Revision AMarco MantovaniNessuna valutazione finora
- DC Motor Speed Control PID Implementation Simulink PDFDocumento12 pagineDC Motor Speed Control PID Implementation Simulink PDFvince kafuaNessuna valutazione finora
- Job Description Oacett Experience Requirements - Revised November 2021Documento6 pagineJob Description Oacett Experience Requirements - Revised November 2021Deepak MasaunNessuna valutazione finora
- Germany - TR6 - Rev 9 - Belegexemplar - ENDocumento52 pagineGermany - TR6 - Rev 9 - Belegexemplar - ENHéctor LodosoNessuna valutazione finora
- Pid Without A PHD PDFDocumento14 paginePid Without A PHD PDFGiovanni Eliezer100% (2)
- Microcontroller Based Digital Control - Dogan IbrahimDocumento191 pagineMicrocontroller Based Digital Control - Dogan IbrahimMuuo WambuaNessuna valutazione finora
- Design and Implementation Speed Control System of PDFDocumento8 pagineDesign and Implementation Speed Control System of PDFvince kafuaNessuna valutazione finora
- DC Motor Speed C BcontrolDocumento6 pagineDC Motor Speed C BcontrolRoger RozarioNessuna valutazione finora
- Section B Group 9 ExpatriateDocumento17 pagineSection B Group 9 ExpatriateAmit ChandekarNessuna valutazione finora
- A Controller Design For Servo Control System Using Different TechniquesDocumento8 pagineA Controller Design For Servo Control System Using Different TechniquesKOKONessuna valutazione finora
- PID Controller Based DC Motor Speed ControlDocumento4 paginePID Controller Based DC Motor Speed ControlEditor IJRITCCNessuna valutazione finora
- Diseño-Guia 7Documento9 pagineDiseño-Guia 7RhinometalI&CNessuna valutazione finora
- A Precise Control of AC Servo Motor Using Neural Network PID ControllerDocumento7 pagineA Precise Control of AC Servo Motor Using Neural Network PID ControllerShantanu PatilNessuna valutazione finora
- Mydcmotorcontrol: Applying Control Theory To A Real DC Motor System in An Open-Loop ConfigurationDocumento5 pagineMydcmotorcontrol: Applying Control Theory To A Real DC Motor System in An Open-Loop ConfigurationnorickespinosNessuna valutazione finora
- Modelling and Control of DC Motor Speed and Position For Wheel Mobile Robot ApplicationDocumento5 pagineModelling and Control of DC Motor Speed and Position For Wheel Mobile Robot Applicationmusavvirabdul123Nessuna valutazione finora
- Neural Network Based Closed Loop Speed Control of DC Motor Using Arduino Uno.Documento4 pagineNeural Network Based Closed Loop Speed Control of DC Motor Using Arduino Uno.seventhsensegroupNessuna valutazione finora
- Calibration Motion Control System-Part2Documento7 pagineCalibration Motion Control System-Part2NURUL FATIN HAMIZAH AH SIAK MOHD HELMINessuna valutazione finora
- DC Motor Speed Control Using PID Controller in Lab View: January 2015Documento5 pagineDC Motor Speed Control Using PID Controller in Lab View: January 2015EngidNessuna valutazione finora
- DC Motor PI ControllerDocumento6 pagineDC Motor PI ControllerPooja MaathNessuna valutazione finora
- Real Time Speed Control of DC Motor With Unknown Transfer Function Through PIDDocumento6 pagineReal Time Speed Control of DC Motor With Unknown Transfer Function Through PIDArbab HaiderNessuna valutazione finora
- Speed Control of DC Motor Using PID Algorithm (STM32F4) : InstructablesDocumento10 pagineSpeed Control of DC Motor Using PID Algorithm (STM32F4) : InstructablespedroNessuna valutazione finora
- CNC SevoDocumento5 pagineCNC SevoLogin AkauntNessuna valutazione finora
- Self Tuned PID Based Speed Control of PMDC Drive: E.Gowthaman C.Dinesh BalajiDocumento7 pagineSelf Tuned PID Based Speed Control of PMDC Drive: E.Gowthaman C.Dinesh BalajiajieNessuna valutazione finora
- Lab 3 ReportDocumento33 pagineLab 3 ReportdasdasdNessuna valutazione finora
- Simulation work on Fractional Order PIλ Control Strategy for speed control of DC motor based on stability boundary locus methodDocumento7 pagineSimulation work on Fractional Order PIλ Control Strategy for speed control of DC motor based on stability boundary locus methodseventhsensegroupNessuna valutazione finora
- Farid ArvaniDocumento6 pagineFarid ArvaniDasuki FahmiNessuna valutazione finora
- 4426 15682 1 PBDocumento9 pagine4426 15682 1 PBmuhammad akbarNessuna valutazione finora
- Study of Fuzzy-PID Control in MATLAB For Two-Phase Hybrid Stepping Motor ZHANG Shengyi and WANG XinmingDocumento4 pagineStudy of Fuzzy-PID Control in MATLAB For Two-Phase Hybrid Stepping Motor ZHANG Shengyi and WANG XinmingMadhusmita BeheraNessuna valutazione finora
- Control of An Unstable Inverted Pendulum SystemDocumento11 pagineControl of An Unstable Inverted Pendulum SystemShivankyJaiswalNessuna valutazione finora
- Fuzzy Based Pid Controller For Speed Control of D.C. Motor Using LabviewDocumento7 pagineFuzzy Based Pid Controller For Speed Control of D.C. Motor Using LabviewGunpla GandamuNessuna valutazione finora
- Design of PLC Based Speed Control of DC Motor Using PI ControllerDocumento4 pagineDesign of PLC Based Speed Control of DC Motor Using PI ControllerTricia Mae EvangelistaNessuna valutazione finora
- Closedloop PID Control of Universal MotorDocumento9 pagineClosedloop PID Control of Universal MotorabhywaNessuna valutazione finora
- Diseño-Guia 6 (PID Controller)Documento8 pagineDiseño-Guia 6 (PID Controller)RhinometalI&CNessuna valutazione finora
- Implementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicDocumento4 pagineImplementing Ball Balancing Beam Using Digital Image Processing and Fuzzy LogicJessica RossNessuna valutazione finora
- Paper UksimDocumento6 paginePaper Uksimsattanic666Nessuna valutazione finora
- LAB 1 ArduinoDocumento11 pagineLAB 1 ArduinoShaikhan NadzemiNessuna valutazione finora
- LAB 1 ArduinoDocumento11 pagineLAB 1 ArduinoShaikhan NadzemiNessuna valutazione finora
- Microprocessor Based Digital PID Controller For Speed Control of D.C. MotorDocumento6 pagineMicroprocessor Based Digital PID Controller For Speed Control of D.C. MotorSwapnica GarreNessuna valutazione finora
- DC Motor Speed Control Using PID Controller in Lab View: January 2015Documento5 pagineDC Motor Speed Control Using PID Controller in Lab View: January 2015lovely personNessuna valutazione finora
- Calibration Motion Control System-Part2 PDFDocumento6 pagineCalibration Motion Control System-Part2 PDFnurhazwaniNessuna valutazione finora
- Study of Fuzzy Logic and Pid Controller in Buck-Boost ConverterDocumento4 pagineStudy of Fuzzy Logic and Pid Controller in Buck-Boost ConverterijsretNessuna valutazione finora
- Digital Control (Unit-1)Documento52 pagineDigital Control (Unit-1)osantqvrzxNessuna valutazione finora
- Result PPRDocumento5 pagineResult PPRMayuri Chauray-shindeNessuna valutazione finora
- Lab Report Control IDocumento19 pagineLab Report Control Iridzwan abuNessuna valutazione finora
- 000 Digital Control LecturesDocumento67 pagine000 Digital Control LecturesPX PRNessuna valutazione finora
- Autotuning Fuzzy PID Controller For Speed Control of BLDC MotorDocumento8 pagineAutotuning Fuzzy PID Controller For Speed Control of BLDC MotorZikra ElninoNessuna valutazione finora
- DC Motor Speed Control Using PID Controller in Lab View: February 2015Documento5 pagineDC Motor Speed Control Using PID Controller in Lab View: February 2015Muhdnursalam ZolkepliNessuna valutazione finora
- Pi Control System Based Speed Control of DC Motor Using MicrocontrollerDocumento13 paginePi Control System Based Speed Control of DC Motor Using MicrocontrollerAnkit BhardwajNessuna valutazione finora
- A PID Controller For Real-Time DC Motor Speed Control Using The C505C Micro ControllerDocumento6 pagineA PID Controller For Real-Time DC Motor Speed Control Using The C505C Micro Controllerbhargav103Nessuna valutazione finora
- 9e1c PDFDocumento5 pagine9e1c PDFsaeedNessuna valutazione finora
- Naung 2018Documento4 pagineNaung 2018KIRAN VNessuna valutazione finora
- DC Motor Speed Control Through Arduino and L298N Motor Driver Using PID ControllerDocumento4 pagineDC Motor Speed Control Through Arduino and L298N Motor Driver Using PID ControllerKuganes ChandranNessuna valutazione finora
- Microcontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMDocumento4 pagineMicrocontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMSphasonke Daniel ZhouNessuna valutazione finora
- Direct Digital Control: Om Prakash BhartiDocumento5 pagineDirect Digital Control: Om Prakash Bhartivictor alfonso campechano venturaNessuna valutazione finora
- Speed Control of DC Motor by Various MethodsDocumento5 pagineSpeed Control of DC Motor by Various MethodsVIVA-TECH IJRINessuna valutazione finora
- Lab11 - Autotuning PDFDocumento26 pagineLab11 - Autotuning PDFEng. Ebrahim A. AlrohmiNessuna valutazione finora
- Lab11 - AutotuningDocumento26 pagineLab11 - AutotuningEng. Ebrahim A. AlrohmiNessuna valutazione finora
- Camera Movement Control Using PID Controller in LabVIEWDocumento5 pagineCamera Movement Control Using PID Controller in LabVIEWEditor IJTSRDNessuna valutazione finora
- Mechatronics System Design - MECA 443 Lab Experiment 3 - Position Control Using An EncoderDocumento6 pagineMechatronics System Design - MECA 443 Lab Experiment 3 - Position Control Using An EncoderAli ChallakNessuna valutazione finora
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorDa EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNessuna valutazione finora
- Advanced Techniques and Technology of Computer-Aided Feedback ControlDa EverandAdvanced Techniques and Technology of Computer-Aided Feedback ControlNessuna valutazione finora
- 2018 - Design of Real-Time PID Tracking Controller Using Arduino Mega 2560for A Permanent Magnet DC Motor Under Real Disturbances.Documento5 pagine2018 - Design of Real-Time PID Tracking Controller Using Arduino Mega 2560for A Permanent Magnet DC Motor Under Real Disturbances.Sachin ShindeNessuna valutazione finora
- Speed of Control of Motor Arduino Matlab Simulation PDFDocumento10 pagineSpeed of Control of Motor Arduino Matlab Simulation PDFvince kafuaNessuna valutazione finora
- Pid ProjectDocumento5 paginePid ProjectroydebopriyaNessuna valutazione finora
- F3678048619Documento6 pagineF3678048619anmolNessuna valutazione finora
- Elec/Tele/Phtn 4123 Electrical/Telecommunications Design ProficiencyDocumento5 pagineElec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiencyvince kafuaNessuna valutazione finora
- Material: Part I: Introduction To System IdentificationDocumento79 pagineMaterial: Part I: Introduction To System Identificationvince kafuaNessuna valutazione finora
- Material: Part I: Introduction To System IdentificationDocumento79 pagineMaterial: Part I: Introduction To System Identificationvince kafuaNessuna valutazione finora
- Lab 3: Control System Design: Part 1: Introduction and ObjectivesDocumento13 pagineLab 3: Control System Design: Part 1: Introduction and Objectivesvince kafuaNessuna valutazione finora
- ELEC2146 L5 StateSpace V03 PDFDocumento22 pagineELEC2146 L5 StateSpace V03 PDFvince kafuaNessuna valutazione finora
- ELEC2146 L2 SimProg V03 PDFDocumento52 pagineELEC2146 L2 SimProg V03 PDFvince kafuaNessuna valutazione finora
- ELEC2146 L7 NonlinearDS V03 PDFDocumento19 pagineELEC2146 L7 NonlinearDS V03 PDFvince kafuaNessuna valutazione finora
- ELEC2146 L8 NumDE V03 PDFDocumento23 pagineELEC2146 L8 NumDE V03 PDFvince kafuaNessuna valutazione finora
- ELEC2146 L2 SimProg V03 PDFDocumento52 pagineELEC2146 L2 SimProg V03 PDFvince kafuaNessuna valutazione finora
- ELEC2146 L10 Discretization V03 PDFDocumento19 pagineELEC2146 L10 Discretization V03 PDFvince kafuaNessuna valutazione finora
- 73-9564-Appl - Note - ABS-EIP - CLC5000 - v.0.20Documento10 pagine73-9564-Appl - Note - ABS-EIP - CLC5000 - v.0.20Jorge MezaNessuna valutazione finora
- MGS1600GY: Precision Magnetic Track Following Sensor With GyrosopeDocumento21 pagineMGS1600GY: Precision Magnetic Track Following Sensor With GyrosopeDwi SaputroNessuna valutazione finora
- Mr. Vinayak Hanchate - CV BIM PDFDocumento3 pagineMr. Vinayak Hanchate - CV BIM PDFYassem MalikNessuna valutazione finora
- How To Configure An Authoritative Time Server in Windows ServerDocumento15 pagineHow To Configure An Authoritative Time Server in Windows ServerAsif Majeed MalikNessuna valutazione finora
- 05 MAS Distributed Constraint OptimizationDocumento124 pagine05 MAS Distributed Constraint Optimizationhai zhangNessuna valutazione finora
- MakeAnimated PowerPoint Slide by PowerPoint SchoolDocumento7 pagineMakeAnimated PowerPoint Slide by PowerPoint SchoolDee BrarNessuna valutazione finora
- Bretec L30C Parts Manual L30CDocumento24 pagineBretec L30C Parts Manual L30CdanielNessuna valutazione finora
- 3932-Article Text-21872-2-10-20211223Documento19 pagine3932-Article Text-21872-2-10-20211223papungNessuna valutazione finora
- Literature ReviewDocumento14 pagineLiterature Reviewapi-625006508Nessuna valutazione finora
- Computer Vision Is An Interdisciplinary Scientific Field That Deals With How Computers Can Gain High-LevelDocumento3 pagineComputer Vision Is An Interdisciplinary Scientific Field That Deals With How Computers Can Gain High-LevelPreah GulatiNessuna valutazione finora
- Four Different Levels of MeasurementDocumento2 pagineFour Different Levels of MeasurementMaria Isabella RuaYanaNessuna valutazione finora
- 201 0722 QPDocumento4 pagine201 0722 QPAsyiqin MohdNessuna valutazione finora
- Routine Test Plan For Stator of 6fra 6068Documento5 pagineRoutine Test Plan For Stator of 6fra 6068Ritesh YadavNessuna valutazione finora
- Engineering Notebook For x-3Documento13 pagineEngineering Notebook For x-3api-261545606Nessuna valutazione finora
- For Refeence Only: Bell 412ep With BLR Fastfin™ SystemDocumento3 pagineFor Refeence Only: Bell 412ep With BLR Fastfin™ SystemHerlambang Surya100% (1)
- Plantech Industries Company Deck v1Documento19 paginePlantech Industries Company Deck v1Nemanja RadićNessuna valutazione finora
- Nil Report EP LabDocumento6 pagineNil Report EP LabCHANDRAPRAKASHNessuna valutazione finora
- CDS BIG OMEGA ® 20in. 133lb-ft K55 API Drift 18.543in.Documento1 paginaCDS BIG OMEGA ® 20in. 133lb-ft K55 API Drift 18.543in.ThierryNessuna valutazione finora
- New Aqua Calibration CertificateDocumento20 pagineNew Aqua Calibration Certificateahmed mohamedNessuna valutazione finora
- En 1434-4Documento47 pagineEn 1434-4onebluelineNessuna valutazione finora
- LV Cable Catalogue (Copper)Documento49 pagineLV Cable Catalogue (Copper)tees220510Nessuna valutazione finora
- Energy Performance Certificate (EPC)Documento8 pagineEnergy Performance Certificate (EPC)Moni ElenaNessuna valutazione finora
- Data Sheet 24 V Batterie DataDocumento4 pagineData Sheet 24 V Batterie DataMichel De Souza CorreaNessuna valutazione finora
- Fault Code 196 (3-Wire Sensor) : Coolant Level Sensor 1 Circuit - Voltage Below Normal or Shorted To Low SourceDocumento3 pagineFault Code 196 (3-Wire Sensor) : Coolant Level Sensor 1 Circuit - Voltage Below Normal or Shorted To Low SourceHamilton MirandaNessuna valutazione finora
- GRID Integration of Renewable Energy SourcesDocumento9 pagineGRID Integration of Renewable Energy SourcesmanasasurendraNessuna valutazione finora
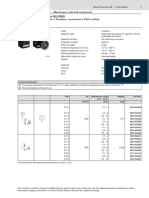
- Pressure Regulator, Series NL2-RGSDocumento3 paginePressure Regulator, Series NL2-RGSHuynh Duc TriNessuna valutazione finora