Potrebbero piacerti anche
- Iccicct - 507 PDFDocumento5 pagineIccicct - 507 PDFGlan DevadhasNessuna valutazione finora
- Controller Design and Implementation of Solar Panel Companion InvertersDocumento11 pagineController Design and Implementation of Solar Panel Companion InvertersroyNessuna valutazione finora
- Reactive Power Flow Control of Grid Tie Inverter To Enhance The Stability of Power GridDocumento8 pagineReactive Power Flow Control of Grid Tie Inverter To Enhance The Stability of Power GridAsraButoolNessuna valutazione finora
- Solar - Photovoltaic - Generators - With - MPPT - and - BatterDocumento12 pagineSolar - Photovoltaic - Generators - With - MPPT - and - BatterCB MildredNessuna valutazione finora
- Stability and Control Aspects of Microgrid Architectures-A Comprehensive ReviewDocumento37 pagineStability and Control Aspects of Microgrid Architectures-A Comprehensive Reviewbipul ahmedNessuna valutazione finora
- Ee 1055 (May) - 1-2Documento2 pagineEe 1055 (May) - 1-2sowmiyaNessuna valutazione finora
- 4 Paper ICITACE 2014Documento6 pagine4 Paper ICITACE 2014Rahmatul HafizahNessuna valutazione finora
- Primary Voltage Control of A Single-Phase Inverter Using Linear Quadratic Regulator With IntegratorDocumento8 paginePrimary Voltage Control of A Single-Phase Inverter Using Linear Quadratic Regulator With IntegratorSwagath Kumar PandaNessuna valutazione finora
- Electric Power Systems Research: SciencedirectDocumento7 pagineElectric Power Systems Research: SciencedirectAbir HezziNessuna valutazione finora
- Enhancing Solar Photovoltaic System Efficiency A Comparative Analysis of Intelligent ANN PandO MPPT Controller Against Traditional AlgorithmsDocumento10 pagineEnhancing Solar Photovoltaic System Efficiency A Comparative Analysis of Intelligent ANN PandO MPPT Controller Against Traditional AlgorithmsEditor IJTSRDNessuna valutazione finora
- Application of Model Current Predictive Control in Low Voltage Ride Through of Photovoltaic StationDocumento6 pagineApplication of Model Current Predictive Control in Low Voltage Ride Through of Photovoltaic StationVinsen Teubun LetsoinNessuna valutazione finora
- Power Control of DC Microgrid With Variable Generation and Energy StorageDocumento5 paginePower Control of DC Microgrid With Variable Generation and Energy StorageSEP-PublisherNessuna valutazione finora
- Dynamic Operation of A Storage Power Plant (SPP) With Voltage Angle Control As Ancillary ServiceDocumento6 pagineDynamic Operation of A Storage Power Plant (SPP) With Voltage Angle Control As Ancillary ServicePRABAL SAMAJDARNessuna valutazione finora
- Analysis of Power Factor Correction of PV-Grid Interconnected System PDFDocumento6 pagineAnalysis of Power Factor Correction of PV-Grid Interconnected System PDFRabindra SinghNessuna valutazione finora
- 05 2016-3-6-pp.27-34Documento8 pagine05 2016-3-6-pp.27-34Meisha desionasistaNessuna valutazione finora
- Renewable Energy: Muhammad Talha, S.R.S. Raihan, N Abd RahimDocumento16 pagineRenewable Energy: Muhammad Talha, S.R.S. Raihan, N Abd RahimsharvinNessuna valutazione finora
- Design and Implementation of Three Phase To Single Phase Solid State TransformerDocumento37 pagineDesign and Implementation of Three Phase To Single Phase Solid State TransformerUsha SreeNessuna valutazione finora
- A Unified Control and Power Management Scheme For PV-Battery-Based Hybrid Microgrids For Both Grid-Connected and Islanded ModesDocumento11 pagineA Unified Control and Power Management Scheme For PV-Battery-Based Hybrid Microgrids For Both Grid-Connected and Islanded ModesBrightworld ProjectsNessuna valutazione finora
- Real and Reactive Power Control of A Three-Phase Single-Stage PV System and PV Voltage StabilityDocumento8 pagineReal and Reactive Power Control of A Three-Phase Single-Stage PV System and PV Voltage StabilityOqaabNessuna valutazione finora
- Optimal MigridsDocumento5 pagineOptimal MigridselecandresNessuna valutazione finora
- Analysis of A Grid-Forming Converter Based On Repetitive Control in Centralized AC MicrogridDocumento8 pagineAnalysis of A Grid-Forming Converter Based On Repetitive Control in Centralized AC MicrogridGabriel VilknNessuna valutazione finora
- Fuzzy Logic Based Maximum Power Point Tracking Designed For 10kW Solar Photovoltaic SystemDocumento7 pagineFuzzy Logic Based Maximum Power Point Tracking Designed For 10kW Solar Photovoltaic SystemFerry OpilOpNessuna valutazione finora
- Ijird, 50Documento24 pagineIjird, 50oke temitope oluwasanmiNessuna valutazione finora
- Distribution Voltage Control Considering The Impact of PV Generation On Tap Changers and Autonomous RegulatorsDocumento11 pagineDistribution Voltage Control Considering The Impact of PV Generation On Tap Changers and Autonomous RegulatorsEvellyne ChrisNessuna valutazione finora
- STouil RRST 4 2019 PP 357-363Documento7 pagineSTouil RRST 4 2019 PP 357-363Tushar MukherjeeNessuna valutazione finora
- 10.15546 - Aeei-2021-0014 3phase Pi ContrlDocumento8 pagine10.15546 - Aeei-2021-0014 3phase Pi ContrlgeremuNessuna valutazione finora
- An Efficient Constant Current Controller For PV Solar Power Generator Integrated With The GridDocumento6 pagineAn Efficient Constant Current Controller For PV Solar Power Generator Integrated With The GridsunilkumareceNessuna valutazione finora
- A Three-Phase Grid Tied SPV System With Adaptive DC Link Voltage For CPI Voltage VariationsDocumento8 pagineA Three-Phase Grid Tied SPV System With Adaptive DC Link Voltage For CPI Voltage VariationsAayesha AhmedNessuna valutazione finora
- Analysis and Implement of Hybrid ANN PandO Based MPPT Controller To Enhance Efficiency of Photovoltaic SystemDocumento12 pagineAnalysis and Implement of Hybrid ANN PandO Based MPPT Controller To Enhance Efficiency of Photovoltaic SystemEditor IJTSRDNessuna valutazione finora
- Research and Design of Inverter Applied in Solar PV Systems Connected To Distribution GridDocumento11 pagineResearch and Design of Inverter Applied in Solar PV Systems Connected To Distribution GridJohn AdewaleNessuna valutazione finora
- Grid-Integrated Industrial Motors-Driven Solar Water Pump With Power Flow Management1Documento5 pagineGrid-Integrated Industrial Motors-Driven Solar Water Pump With Power Flow Management1Editor in ChiefNessuna valutazione finora
- IET Generation Trans Dist - 2021 - BagchiDocumento12 pagineIET Generation Trans Dist - 2021 - BagchiMohamed SobhyNessuna valutazione finora
- Electric Power Systems Research: SciencedirectDocumento14 pagineElectric Power Systems Research: Sciencedirectoscard1ofNessuna valutazione finora
- A MPPT With Sliding Mode Control For PV System: AuthorDocumento8 pagineA MPPT With Sliding Mode Control For PV System: AuthorAkbar aliNessuna valutazione finora
- RP Report New Second One123Documento9 pagineRP Report New Second One123Electrio MurmuNessuna valutazione finora
- Solar Photovoltaic Power Conversion Using Modular Multilevel Converter PDFDocumento6 pagineSolar Photovoltaic Power Conversion Using Modular Multilevel Converter PDFMohan SriramNessuna valutazione finora
- Energy Conversion and Management: Z. Zhou, P.M. Holland, P. IgicDocumento10 pagineEnergy Conversion and Management: Z. Zhou, P.M. Holland, P. IgicjulioNessuna valutazione finora
- Design and Simulation of A Modified Sliding Mode Controller Evaluated With A Conventional PampO MPPT Controller For Solar ApplicationsDocumento5 pagineDesign and Simulation of A Modified Sliding Mode Controller Evaluated With A Conventional PampO MPPT Controller For Solar ApplicationsMazoon ButtNessuna valutazione finora
- Comparison of Maximum Power Tracking Using Artificial Intelligence Based Optimization Controller in Photovoltaic SystemsDocumento6 pagineComparison of Maximum Power Tracking Using Artificial Intelligence Based Optimization Controller in Photovoltaic Systemsindra setyawanNessuna valutazione finora
- 05IPST080Documento6 pagine05IPST080Niveditha NamasivaayamNessuna valutazione finora
- Dynamic Power Management and Control of PV PEM Fuel Cell Based Standalone AC/DC Microgrid Using Hybrid Energy StorageDocumento12 pagineDynamic Power Management and Control of PV PEM Fuel Cell Based Standalone AC/DC Microgrid Using Hybrid Energy StorageTRIAD TECHNO SERVICESNessuna valutazione finora
- A New Fuzzy Based INC MPPT Algorithm ForDocumento6 pagineA New Fuzzy Based INC MPPT Algorithm Forcharushila patelNessuna valutazione finora
- 1final Iete - Forth Revision1Documento10 pagine1final Iete - Forth Revision1Dr. Monika JainNessuna valutazione finora
- Microgrids Black StartDocumento7 pagineMicrogrids Black StartLalit ChoudharyNessuna valutazione finora
- Energy Management Control of Hybrid Power System With Smes Battery As Energy StorageDocumento18 pagineEnergy Management Control of Hybrid Power System With Smes Battery As Energy StorageShaniba TPNessuna valutazione finora
- Modeling and Simulation of A GRID-TIED Solar PV System: K.Sakthivel, V.Jayalakshmi, G.RajakumariDocumento7 pagineModeling and Simulation of A GRID-TIED Solar PV System: K.Sakthivel, V.Jayalakshmi, G.RajakumariChairul AkbarNessuna valutazione finora
- Comparative Analysis of Backstepping and Active Disturbance Rejection Control Approach Used in Photovoltaic System Connected To The GridDocumento10 pagineComparative Analysis of Backstepping and Active Disturbance Rejection Control Approach Used in Photovoltaic System Connected To The GridDileep VarmaNessuna valutazione finora
- GridDocumento6 pagineGridgiongan342Nessuna valutazione finora
- Evaluation of Photovoltaic Systems For Reactive Power Compensation in Low Voltage Power SystemsDocumento6 pagineEvaluation of Photovoltaic Systems For Reactive Power Compensation in Low Voltage Power SystemsElkin Polo ArizaNessuna valutazione finora
- 38.electrical - IJEEER - Bi - Directional Grid-Connected - Sravan KumarDocumento10 pagine38.electrical - IJEEER - Bi - Directional Grid-Connected - Sravan KumarTJPRC PublicationsNessuna valutazione finora
- Energies 05 03425Documento6 pagineEnergies 05 03425Madhav SharmaNessuna valutazione finora
- Stability Improvement of Microgrids Using A Novel Reduced UPFC Structure Via Nonlinear Optimal ControlDocumento7 pagineStability Improvement of Microgrids Using A Novel Reduced UPFC Structure Via Nonlinear Optimal ControlEngr GM SialNessuna valutazione finora
- Single-Phase Seven-Level Grid-Connected Inverter For Photovoltaic SystemDocumento7 pagineSingle-Phase Seven-Level Grid-Connected Inverter For Photovoltaic Systemanil kasotNessuna valutazione finora
- 48 An Improved Maximum Power Point Tracking For PDFDocumento10 pagine48 An Improved Maximum Power Point Tracking For PDFSouhaib LoudaNessuna valutazione finora
- 1 s2.0 S1876610214027908 Main PDFDocumento7 pagine1 s2.0 S1876610214027908 Main PDFkullay reddy desi reddyNessuna valutazione finora
- A Grid Tied SPV System With Adaptive DC Link Voltage For CPI Voltage Variations Using Fuzzy Logic ControlDocumento9 pagineA Grid Tied SPV System With Adaptive DC Link Voltage For CPI Voltage Variations Using Fuzzy Logic ControlAbhinav ShendageNessuna valutazione finora
- Microgrid EveryoneDocumento7 pagineMicrogrid EveryoneTareq AzizNessuna valutazione finora
- Design and Implementation of A Nonlinear PI Predictive Controller For A Grid-Tied Photovoltaic InverterDocumento10 pagineDesign and Implementation of A Nonlinear PI Predictive Controller For A Grid-Tied Photovoltaic InverterAmiir AmirNessuna valutazione finora
- Droop Control of Bi-Directional DC-DC Converter For Improved Voltage Regulation and Load Sharing in DC MicrogridDocumento16 pagineDroop Control of Bi-Directional DC-DC Converter For Improved Voltage Regulation and Load Sharing in DC MicrogridsathishNessuna valutazione finora
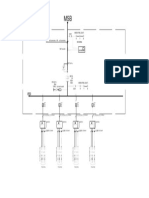
- SDNL He Thong-ModelDocumento1 paginaSDNL He Thong-ModelTrần Quang TuyênNessuna valutazione finora
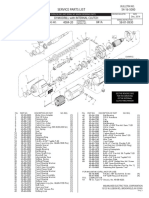
- Service Parts: Industrial Generator SetsDocumento108 pagineService Parts: Industrial Generator SetsTrần Quang TuyênNessuna valutazione finora
- Electric Power System Inertia: Requirements, Challenges and SolutionsDocumento19 pagineElectric Power System Inertia: Requirements, Challenges and SolutionsTrần Quang TuyênNessuna valutazione finora
- Table Soccer Basics enDocumento12 pagineTable Soccer Basics enTrần Quang TuyênNessuna valutazione finora
- Guide PedagogiqueGBRDocumento43 pagineGuide PedagogiqueGBRTrần Quang TuyênNessuna valutazione finora
- Sma Grid Guard 10.0: Technical InformationDocumento52 pagineSma Grid Guard 10.0: Technical InformationTrần Quang TuyênNessuna valutazione finora
- Operation & Maintenance ManualDocumento112 pagineOperation & Maintenance ManualTrần Quang TuyênNessuna valutazione finora
- HSY-25 T5: Hs - Stationary Range Standard SoundproofingDocumento6 pagineHSY-25 T5: Hs - Stationary Range Standard SoundproofingTrần Quang TuyênNessuna valutazione finora
- Flexible Coil Current Transformer Installation GuideDocumento19 pagineFlexible Coil Current Transformer Installation GuideTrần Quang TuyênNessuna valutazione finora
- Smart Inverter Technology ForDocumento27 pagineSmart Inverter Technology ForTrần Quang TuyênNessuna valutazione finora
- Limited Warranty Statement Photovoltaic Bifacial Module ProductsDocumento5 pagineLimited Warranty Statement Photovoltaic Bifacial Module ProductsTrần Quang TuyênNessuna valutazione finora
- 000 - Solar Photovoltaic Generators With MPPT and Battery Storage in Microgrids-File Exchange - MATLAB Central PDFDocumento20 pagine000 - Solar Photovoltaic Generators With MPPT and Battery Storage in Microgrids-File Exchange - MATLAB Central PDFTrần Quang TuyênNessuna valutazione finora
- SC SCS US GridServices TI en 11Documento16 pagineSC SCS US GridServices TI en 11Trần Quang TuyênNessuna valutazione finora
- Energies 12 01826 PDFDocumento6 pagineEnergies 12 01826 PDFTrần Quang TuyênNessuna valutazione finora
- Power Systems Kohler PowerDocumento28 paginePower Systems Kohler PowerTrần Quang TuyênNessuna valutazione finora
- 20190226-Solar Permitting Guidebook 4th EditionDocumento114 pagine20190226-Solar Permitting Guidebook 4th EditionTrần Quang TuyênNessuna valutazione finora
- Microgrid of JapanDocumento28 pagineMicrogrid of JapanTrần Quang TuyênNessuna valutazione finora
- 15PPM Ocd CM PDFDocumento4 pagine15PPM Ocd CM PDFTrần Quang Tuyên100% (1)
- Automatic Backup Unit: Installation ManualDocumento24 pagineAutomatic Backup Unit: Installation ManualTrần Quang TuyênNessuna valutazione finora
- 1Documento13 pagine1Trần Quang TuyênNessuna valutazione finora
- Sunny Island Generator - White Paper: Technical Documentation SIGEN-13:F E0914Documento27 pagineSunny Island Generator - White Paper: Technical Documentation SIGEN-13:F E0914Trần Quang TuyênNessuna valutazione finora
- Band GapDocumento10 pagineBand Gappetru apopeiNessuna valutazione finora
- RECON-BRX-2017-Breaking CRP On NXP LPC Microcontrollers SlidesDocumento57 pagineRECON-BRX-2017-Breaking CRP On NXP LPC Microcontrollers SlidespaulNessuna valutazione finora
- Amalgam Uv Specs and User ManualDocumento3 pagineAmalgam Uv Specs and User ManualNaldre PhamhinthuanNessuna valutazione finora
- Neuromorphic Computing-Seminar ReportDocumento20 pagineNeuromorphic Computing-Seminar ReportArti PatleNessuna valutazione finora
- OZ9939GNDocumento12 pagineOZ9939GNEduardo SierraNessuna valutazione finora
- Premier Slide ManualDocumento28 paginePremier Slide Manualinfo2378Nessuna valutazione finora
- Ideapad 330 15intel Platform SpecificationsDocumento1 paginaIdeapad 330 15intel Platform Specificationslegatus2yahoo.grNessuna valutazione finora
- The Digital Library Project VOLUME 1: The World of Knowbots (Draft)Documento48 pagineThe Digital Library Project VOLUME 1: The World of Knowbots (Draft)Md Kamruzzaman KhanNessuna valutazione finora
- Sav 4752Documento39 pagineSav 4752tlidiaNessuna valutazione finora
- LG Cl-18 Lb563t 563le Lb563t-Gr-gt TFT LCD Full 730Documento26 pagineLG Cl-18 Lb563t 563le Lb563t-Gr-gt TFT LCD Full 730Fidel ArroyoNessuna valutazione finora
- Hafiz Muhammad AjmalDocumento2 pagineHafiz Muhammad AjmalajmalNessuna valutazione finora
- TES-P-119-25-R2-Lighting and Receptacles For Substation Yard Building-1Documento20 pagineTES-P-119-25-R2-Lighting and Receptacles For Substation Yard Building-1Salman YounasNessuna valutazione finora
- 2022 Auto Wiring DLC TestDocumento4 pagine2022 Auto Wiring DLC TestmilevyoNessuna valutazione finora
- CLAD Sample Exam 1Documento3 pagineCLAD Sample Exam 1Hemakumar MohanNessuna valutazione finora
- Siglent SDS1000CML Oscilloscope Service ManualDocumento61 pagineSiglent SDS1000CML Oscilloscope Service Manualandorrr4937Nessuna valutazione finora
- 808D Diagnostics Manual 0615 en en-USDocumento566 pagine808D Diagnostics Manual 0615 en en-USSatish KumarNessuna valutazione finora
- Introduction To Delta-Sigma Adcs: Ece1371 Advanced Analog CircuitsDocumento54 pagineIntroduction To Delta-Sigma Adcs: Ece1371 Advanced Analog CircuitsmuammadmrdNessuna valutazione finora
- 54 16 5000Documento2 pagine54 16 5000Anonymous VKPfb3Nessuna valutazione finora
- Harmonic GenerationDocumento20 pagineHarmonic Generationue06037Nessuna valutazione finora
- Ec2045 Satellite CommunicationDocumento2 pagineEc2045 Satellite CommunicationTHIRUNEELAKANDANNessuna valutazione finora
- 21 Ele 13Documento3 pagine21 Ele 13c rajNessuna valutazione finora
- An 571Documento3 pagineAn 571shah435457Nessuna valutazione finora
- Fault Code 111: Engine Control Module Critical Internal Failure - Bad Intelligent Device or ComponentDocumento3 pagineFault Code 111: Engine Control Module Critical Internal Failure - Bad Intelligent Device or ComponentHamilton MirandaNessuna valutazione finora
- Mds-4310 Radio TransceiverDocumento129 pagineMds-4310 Radio Transceiverdiegoalvarez2012Nessuna valutazione finora
- University Physics Lab Report (UWI)Documento10 pagineUniversity Physics Lab Report (UWI)VanoiMariaStylesWilkinsonNessuna valutazione finora
- Toshiba Satellite C650 Inwertec Manaus Mas10m Premp Build Rev A02 PDFDocumento52 pagineToshiba Satellite C650 Inwertec Manaus Mas10m Premp Build Rev A02 PDFThomas DelacruzNessuna valutazione finora
- E Valupak M Specs InstructionsDocumento8 pagineE Valupak M Specs Instructionsmgk80Nessuna valutazione finora
- Microfon Philips SME 570Documento2 pagineMicrofon Philips SME 570AramaNessuna valutazione finora
- Service Manual: AVR-2809CI AVR-2809 AVR-989 AVC-2809Documento177 pagineService Manual: AVR-2809CI AVR-2809 AVR-989 AVC-2809Lan NgocNessuna valutazione finora
- Quadratic Boost Converter With Less Input Current Ripple and Rear-End Capacitor Voltage Stress For Renewable Energy ApplicationsDocumento11 pagineQuadratic Boost Converter With Less Input Current Ripple and Rear-End Capacitor Voltage Stress For Renewable Energy ApplicationsSureshkumar AlagarsamyNessuna valutazione finora