Potrebbero piacerti anche
- Principios de Medicion de EnergiaDocumento27 paginePrincipios de Medicion de EnergiaVictor Manuel Martin Adame100% (1)
- Practica 08 y 09 - Ejercicios ResueltosDocumento9 paginePractica 08 y 09 - Ejercicios ResueltosROLLY JOCSAN FLORES CHERRES25% (8)
- Tipos de Roscas y Sus AplicacionesDocumento10 pagineTipos de Roscas y Sus AplicacionesSebastian Garcia100% (1)
- Transformador (Trabajo Final)Documento24 pagineTransformador (Trabajo Final)Andres Alexander Moran ZamoraNessuna valutazione finora
- Ensayo en VacioDocumento11 pagineEnsayo en VacioVíctor NúñezNessuna valutazione finora
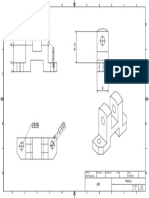
- SoporteDocumento1 paginaSoporteKevin MogrovejoNessuna valutazione finora
- Informe Practica Estatica 7 Adrian CajamarcaDocumento5 pagineInforme Practica Estatica 7 Adrian CajamarcaKevin MogrovejoNessuna valutazione finora
- Analisis de Resultados ResortesDocumento1 paginaAnalisis de Resultados ResortesKevin MogrovejoNessuna valutazione finora
- SEMÁFORODocumento7 pagineSEMÁFOROKevin MogrovejoNessuna valutazione finora
- Informe FinalDocumento5 pagineInforme FinalKevin MogrovejoNessuna valutazione finora
- PreguntasDocumento1 paginaPreguntasKevin MogrovejoNessuna valutazione finora
- Lab 7Documento3 pagineLab 7Kevin MogrovejoNessuna valutazione finora
- Calibracion de PresionDocumento4 pagineCalibracion de PresionKevin MogrovejoNessuna valutazione finora
- EngranajesDocumento3 pagineEngranajesKevin MogrovejoNessuna valutazione finora
- Lab 2Documento3 pagineLab 2Kevin MogrovejoNessuna valutazione finora
- Ensayo de Resortes A CompresiónDocumento8 pagineEnsayo de Resortes A CompresiónKevin MogrovejoNessuna valutazione finora
- Practica 1 Medicion de PresionDocumento7 paginePractica 1 Medicion de PresionKevin MogrovejoNessuna valutazione finora
- Automatización II - Elementos de TrabajoDocumento17 pagineAutomatización II - Elementos de TrabajoRonny TituanaNessuna valutazione finora
- Proyecto Sistemas Mecanicos PROBLEMA5Documento9 pagineProyecto Sistemas Mecanicos PROBLEMA5Kevin MogrovejoNessuna valutazione finora
- Tipos de SoldaduraDocumento5 pagineTipos de SoldaduraKevin MogrovejoNessuna valutazione finora
- Deber 2Documento5 pagineDeber 2Kevin MogrovejoNessuna valutazione finora
- FINALDocumento6 pagineFINALKevin MogrovejoNessuna valutazione finora
- Universidad Politecnica SalesianaDocumento5 pagineUniversidad Politecnica SalesianaKevin MogrovejoNessuna valutazione finora
- Pajon, Javier y Davila, Juan Antonio (2000) - Teoria Basica para El Diseno y Calculo de Tuberias, Elementos de Maquinas y Recipientes A PR (..)Documento49 paginePajon, Javier y Davila, Juan Antonio (2000) - Teoria Basica para El Diseno y Calculo de Tuberias, Elementos de Maquinas y Recipientes A PR (..)Robin RamirezNessuna valutazione finora
- Deber 3Documento4 pagineDeber 3Kevin MogrovejoNessuna valutazione finora
- LevaDocumento4 pagineLevaKevin MogrovejoNessuna valutazione finora
- SoldaduraDocumento8 pagineSoldaduraKevin MogrovejoNessuna valutazione finora
- FINALDocumento6 pagineFINALKevin MogrovejoNessuna valutazione finora
- 2Documento3 pagine2Kevin MogrovejoNessuna valutazione finora
- Red de Comunicacion - Administracion y FinanzasDocumento7 pagineRed de Comunicacion - Administracion y FinanzasKevin MogrovejoNessuna valutazione finora
- Practica 1 Medicion de PresionDocumento6 paginePractica 1 Medicion de PresionKevin MogrovejoNessuna valutazione finora
- Ensayo de Resortes A CompresiónDocumento8 pagineEnsayo de Resortes A CompresiónKevin MogrovejoNessuna valutazione finora
- Deber 2Documento4 pagineDeber 2Kevin MogrovejoNessuna valutazione finora
- Caida LibreDocumento25 pagineCaida LibreLorena Rafael TaipeNessuna valutazione finora
- Problem As Anal Is Is DimensionalDocumento1 paginaProblem As Anal Is Is DimensionalCesar CatuntaNessuna valutazione finora
- Examen-Parcial-Dinamica 2017 1 Solucionario JuevesbDocumento3 pagineExamen-Parcial-Dinamica 2017 1 Solucionario JuevesbCristian Castro100% (1)
- Practica 1 Elt 2470Documento2 paginePractica 1 Elt 2470KevinEcosAlaNessuna valutazione finora
- Campos ElectrostáticosDocumento7 pagineCampos ElectrostáticosJOAN FERLEY GARCÍA MARTÍNEZNessuna valutazione finora
- Diferencia de Potencial EléctricoDocumento2 pagineDiferencia de Potencial EléctricoPauParoxysmNessuna valutazione finora
- Informe de Fisica PDFDocumento11 pagineInforme de Fisica PDFAlexis UribeNessuna valutazione finora
- Universidad Nacional Del SantaDocumento14 pagineUniversidad Nacional Del SantaWilder QuilicheNessuna valutazione finora
- ¿Qué Es La Electrostática?Documento2 pagine¿Qué Es La Electrostática?Anonymous khXKw5nAUc100% (1)
- FIME 16 Examen Final 2020-1Documento3 pagineFIME 16 Examen Final 2020-1MrONLYDRUMSNessuna valutazione finora
- Bloodcells 42x42Documento1 paginaBloodcells 42x42Yecid RomeroNessuna valutazione finora
- EJERCICIOStema 2Documento47 pagineEJERCICIOStema 2Cristian Romero SeguraNessuna valutazione finora
- Preguntas Examen Ingeominas TransporteDocumento5 paginePreguntas Examen Ingeominas Transportemauricio876Nessuna valutazione finora
- ElectromagnetismoDocumento5 pagineElectromagnetismoCarlos SanchezNessuna valutazione finora
- Ejercicios Caída Libre 1,5,1Documento6 pagineEjercicios Caída Libre 1,5,1Jonathan Esquivel Cruz50% (2)
- Dinamica de Rotacion Del Cuerpo RigidoDocumento22 pagineDinamica de Rotacion Del Cuerpo RigidoLuis Fernando Jave HerasNessuna valutazione finora
- Deducción de Fórmula Distancia de ParadaDocumento4 pagineDeducción de Fórmula Distancia de ParadaAlex BustosNessuna valutazione finora
- Analisis SPAT en Transf. Distribucion PDFDocumento219 pagineAnalisis SPAT en Transf. Distribucion PDFDantiancNessuna valutazione finora
- Reporte de Práctica No. 4Documento10 pagineReporte de Práctica No. 4Dann De JesusNessuna valutazione finora
- Primer Taller Mecánica de Fluidos G7 Bayona-Molano-Torres PDFDocumento23 paginePrimer Taller Mecánica de Fluidos G7 Bayona-Molano-Torres PDFNicolas Molano BarónNessuna valutazione finora
- Cuestionario 1 10.05Documento2 pagineCuestionario 1 10.05Isrrael SaraguroNessuna valutazione finora
- Practica 8Documento10 paginePractica 8Alvaro Jose Nieves ValeraNessuna valutazione finora
- ATV61E Installation Manual ES 1760657 04Documento77 pagineATV61E Installation Manual ES 1760657 04Easy Energy SACNessuna valutazione finora
- Ondas ElectromagneticasDocumento6 pagineOndas ElectromagneticasMelissa Flores100% (1)
- Movimiento Rectilineo UniformeDocumento3 pagineMovimiento Rectilineo UniformeAnahiNessuna valutazione finora
- Enunciados Ejercicios Recapitulación FísicaDocumento2 pagineEnunciados Ejercicios Recapitulación FísicaMiguel GutiérrezNessuna valutazione finora