Potrebbero piacerti anche
- CONTROL UNIT TMC - 230 - /11: DM - TurretsDocumento22 pagineCONTROL UNIT TMC - 230 - /11: DM - TurretsVladimir100% (4)
- Rm5 Operation Manual (1-38Documento45 pagineRm5 Operation Manual (1-38tonnytoons67% (3)
- Blu Ray Disc and Copper Wires As Solar PanelDocumento37 pagineBlu Ray Disc and Copper Wires As Solar PanelDavid Marc Josef Victorio67% (6)
- SLA7024MDocumento12 pagineSLA7024MEddy SulbaranNessuna valutazione finora
- NG 10 Flyer 09 2011 627d145123Documento4 pagineNG 10 Flyer 09 2011 627d145123SatheeshNessuna valutazione finora
- NG 10 Flyer 09 2011 627d145122Documento8 pagineNG 10 Flyer 09 2011 627d145122SatheeshNessuna valutazione finora
- SRAC8 UserManual EN20210610Documento18 pagineSRAC8 UserManual EN20210610Nadia CondeNessuna valutazione finora
- JVL The MAC Motor AC-Servo Motors With Integrated Driver MAC400 To MAC3000Documento16 pagineJVL The MAC Motor AC-Servo Motors With Integrated Driver MAC400 To MAC3000Electromate100% (1)
- ABB String InvertersDocumento4 pagineABB String InvertersJosephine LegakNessuna valutazione finora
- NG 10 Flyer 09 2011 627d145122Documento2 pagineNG 10 Flyer 09 2011 627d145122SatheeshNessuna valutazione finora
- TMC5072 Datasheet Rev1.25Documento106 pagineTMC5072 Datasheet Rev1.25Florian OuvrardNessuna valutazione finora
- Circuit Note: H-Bridge Driver Circuit Using Isolated Half-Bridge DriversDocumento6 pagineCircuit Note: H-Bridge Driver Circuit Using Isolated Half-Bridge Driversrajat tiwariNessuna valutazione finora
- X3-Brochure 1 (9-17) - 1 - CompressedDocumento4 pagineX3-Brochure 1 (9-17) - 1 - CompressedAlrich BalanayNessuna valutazione finora
- TMC5160A Datasheet Rev1.17Documento134 pagineTMC5160A Datasheet Rev1.17Florian OuvrardNessuna valutazione finora
- 700 PC DS Pump ControllerDocumento2 pagine700 PC DS Pump ControllerOel NaubNessuna valutazione finora
- LT 8364Documento32 pagineLT 8364gtcv805Nessuna valutazione finora
- 4 Ziv 5ctd E2f Data Sheet English Rev 1.1Documento2 pagine4 Ziv 5ctd E2f Data Sheet English Rev 1.1Pablo RiscoNessuna valutazione finora
- Cariadores de FrecuenciaDocumento8 pagineCariadores de FrecuenciaSAW MILLNessuna valutazione finora
- Using The ADC0808/ADC0809 8-Bit P Compatible A/D Converters With 8-Channel Analog MultiplexerDocumento23 pagineUsing The ADC0808/ADC0809 8-Bit P Compatible A/D Converters With 8-Channel Analog MultiplexerRiskyNessuna valutazione finora
- Ap 3843 CPDocumento13 pagineAp 3843 CPJesus ChaileNessuna valutazione finora
- Sa56 Design Ideas: MicrotechnologyDocumento17 pagineSa56 Design Ideas: Microtechnologyvikaspawar2012Nessuna valutazione finora
- TMC5160A Datasheet Rev1.13Documento134 pagineTMC5160A Datasheet Rev1.13Paraschiv DariusNessuna valutazione finora
- Cat - Drives - 2014 1Documento72 pagineCat - Drives - 2014 1JeanNessuna valutazione finora
- Yai Kaeps80000123 PDFDocumento536 pagineYai Kaeps80000123 PDFIrving CurasantaNessuna valutazione finora
- 5 - Manual Software DuplomaticDocumento53 pagine5 - Manual Software DuplomaticLuiz Gustavo Pastrello100% (1)
- TMC220x and TMC2224Documento79 pagineTMC220x and TMC2224Saulius StasysNessuna valutazione finora
- Transformer Monitoring : Protective RelaysDocumento7 pagineTransformer Monitoring : Protective Relaysgaurang1111Nessuna valutazione finora
- TMC7300 Datasheet Rev1.08Documento43 pagineTMC7300 Datasheet Rev1.08NilutpalNessuna valutazione finora
- Conversor DC (Simoreg - K) PDFDocumento114 pagineConversor DC (Simoreg - K) PDFangeloNessuna valutazione finora
- Diodes - Inc. AP3842CMTR E1 DatasheetDocumento14 pagineDiodes - Inc. AP3842CMTR E1 DatasheetEsteban Elias Marquez EscalanteNessuna valutazione finora
- 0182690SBYDocumento4 pagine0182690SBYgeovasNessuna valutazione finora
- Proact™ P-Series Position Controller: ApplicationsDocumento5 pagineProact™ P-Series Position Controller: Applicationschao wangNessuna valutazione finora
- Lbs Motorize Schneider RLDocumento24 pagineLbs Motorize Schneider RLMohamad AriefNessuna valutazione finora
- Analog Amplifier Ra-2Documento10 pagineAnalog Amplifier Ra-2ankitkanujiyaNessuna valutazione finora
- 7sd600 CatalogueDocumento19 pagine7sd600 Catalogueramesh1950Nessuna valutazione finora
- Spad346 TobencDocumento12 pagineSpad346 Tobencmpalani2@hotmail.comNessuna valutazione finora
- AN028 - Building An Auto-Ranging DMMDocumento8 pagineAN028 - Building An Auto-Ranging DMMMufasirNessuna valutazione finora
- VNH7040AYTR DatasheetDocumento48 pagineVNH7040AYTR DatasheetStelian CrisanNessuna valutazione finora
- Standard: 5 300 HP 3 PHASE 50/60 HZDocumento2 pagineStandard: 5 300 HP 3 PHASE 50/60 HZtuNessuna valutazione finora
- Controlador de Transmision 1Documento3 pagineControlador de Transmision 1JOEL APONTE ORTIZNessuna valutazione finora
- SF4P Varispeed L7 EN INT01Documento4 pagineSF4P Varispeed L7 EN INT01Sam WildNessuna valutazione finora
- TMC5240 Preliminary Datasheet-3115115Documento149 pagineTMC5240 Preliminary Datasheet-3115115Lars domeNessuna valutazione finora
- Irjet V6i5784 PDFDocumento6 pagineIrjet V6i5784 PDFMihir DaveNessuna valutazione finora
- DSP-32207BHenglish ManualDocumento12 pagineDSP-32207BHenglish ManualMiguel D. Diaz H.Nessuna valutazione finora
- Encendido M-M Autos TC ArgentinaDocumento2 pagineEncendido M-M Autos TC ArgentinaLeandroNessuna valutazione finora
- Ucc28c40, Ucc28c41, Ucc28c42, Ucc28c43, Ucc28c44, Ucc28c45 Ucc38c40, Ucc38c41, Ucc38c42, Ucc38c43, Ucc38c44, Ucc38c45Documento32 pagineUcc28c40, Ucc28c41, Ucc28c42, Ucc28c43, Ucc28c44, Ucc28c45 Ucc38c40, Ucc38c41, Ucc38c42, Ucc38c43, Ucc38c44, Ucc38c45curz0% (1)
- Inverse-Time Overcurrent & E/F Relays: Type ICM 21, ICM 21BDocumento8 pagineInverse-Time Overcurrent & E/F Relays: Type ICM 21, ICM 21Brkanth3203Nessuna valutazione finora
- Bodas Controller RC: Series 22Documento16 pagineBodas Controller RC: Series 22Irina VarzouNessuna valutazione finora
- ProductSheet MEK2500 PS2028 3 en 20201201Documento3 pagineProductSheet MEK2500 PS2028 3 en 20201201Papcel InstrumentNessuna valutazione finora
- MC33886Documento28 pagineMC33886abel manuel chico oleceNessuna valutazione finora
- Taylor Lifts SMSCatalogueDocumento18 pagineTaylor Lifts SMSCatalogueMohd Abu AjajNessuna valutazione finora
- TMCM-1043 Short ManualDocumento2 pagineTMCM-1043 Short ManualAnadiKashyapNessuna valutazione finora
- Bidirectional 3-Phase Brushless DC Motor Controller/Driver With Back-Emf SensingDocumento13 pagineBidirectional 3-Phase Brushless DC Motor Controller/Driver With Back-Emf SensingMilka RamirezNessuna valutazione finora
- Advanced Motion Controls B15A8Documento8 pagineAdvanced Motion Controls B15A8Servo2GoNessuna valutazione finora
- Advanced Motion Controls BE30A8Documento9 pagineAdvanced Motion Controls BE30A8Servo2GoNessuna valutazione finora
- XC9235 - 36 - 37 DCDC Study GuideDocumento14 pagineXC9235 - 36 - 37 DCDC Study GuideTumenbayar LkhagvatserenNessuna valutazione finora
- Megawin: Numerical Over Current & Earth Fault RelayDocumento16 pagineMegawin: Numerical Over Current & Earth Fault Relaynaran19794735100% (5)
- Mind-B Series Mind-B Series: Stepping Motor DrivesDocumento2 pagineMind-B Series Mind-B Series: Stepping Motor DrivesAlberto ZilioNessuna valutazione finora
- Product Brief 2SP0115T 2015Documento2 pagineProduct Brief 2SP0115T 2015hieuhuechNessuna valutazione finora
- Key FeaturesDocumento11 pagineKey Featuresghostrider1098Nessuna valutazione finora
- Zero Air Loss Drain ValveDocumento30 pagineZero Air Loss Drain Valvenur hadiNessuna valutazione finora
- Solar Dehydrator Final PaperDocumento35 pagineSolar Dehydrator Final PaperElla Jane CabanagNessuna valutazione finora
- Assignment 1 - Stress StrainDocumento1 paginaAssignment 1 - Stress StrainZain Tahir0% (2)
- P 20Documento103 pagineP 20DELSP - Dynamic Elevator Services Pakistan100% (6)
- Material Selection Using Ashby MethodDocumento6 pagineMaterial Selection Using Ashby MethodRaúl AnelNessuna valutazione finora
- Railway Short Notes by Shubham SirDocumento101 pagineRailway Short Notes by Shubham SirNikita TiwariNessuna valutazione finora
- Engine Electrical System General Information SpecificationsDocumento55 pagineEngine Electrical System General Information SpecificationsIsaac Galvez EscuderoNessuna valutazione finora
- Electrical Data: ML06 ApplicationsDocumento5 pagineElectrical Data: ML06 ApplicationsCarlos MeloNessuna valutazione finora
- SDT Series Datasheet: Technical DataDocumento1 paginaSDT Series Datasheet: Technical DataAlbert IzhganaitisNessuna valutazione finora
- Elevator Control Valves: EN ISO 9001Documento6 pagineElevator Control Valves: EN ISO 9001Jibjab7Nessuna valutazione finora
- Pagine Per L'Insegnante: Idee Per Una Lezione DigitaleDocumento6 paginePagine Per L'Insegnante: Idee Per Una Lezione DigitaleVasile TurtaNessuna valutazione finora
- Question and Solution of RMO (2023)Documento6 pagineQuestion and Solution of RMO (2023)Fire Blaze PlaysNessuna valutazione finora
- Compression Test For MetalsDocumento11 pagineCompression Test For MetalsmohamedyahaiNessuna valutazione finora
- Allengers HF 49 Service ManualDocumento6 pagineAllengers HF 49 Service Manualdemon6592Nessuna valutazione finora
- 5 Measurement of Water-Holding Capacity and Juiciness: K.O. Honikel and R. HammDocumento37 pagine5 Measurement of Water-Holding Capacity and Juiciness: K.O. Honikel and R. HammFrancisco QuiñonesNessuna valutazione finora
- AFL Standard Compression Joints For Alumoweld and Steel Ground Wire ConductorsDocumento2 pagineAFL Standard Compression Joints For Alumoweld and Steel Ground Wire ConductorsDiego SecoNessuna valutazione finora
- Mapua University: Experiment No. 4BDocumento9 pagineMapua University: Experiment No. 4BGeojanni PangibitanNessuna valutazione finora
- Super WoW 1 - DeMO - Student S BookDocumento11 pagineSuper WoW 1 - DeMO - Student S BooksunnyNessuna valutazione finora
- Wind LoadDocumento34 pagineWind LoadArah Louise ApostolNessuna valutazione finora
- Geometry FormulasDocumento5 pagineGeometry FormulasAlyzza Rose Pampliega LedesmaNessuna valutazione finora
- Vdma 442 T. Klenk Et Al. Conductive SimmerringsDocumento7 pagineVdma 442 T. Klenk Et Al. Conductive SimmerringsChandrasekar KrishnamurthyNessuna valutazione finora
- IITB AE PG SpecializationElectives 20221226Documento9 pagineIITB AE PG SpecializationElectives 20221226samNessuna valutazione finora
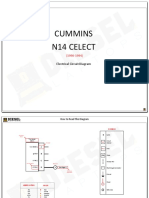
- Cummins N14 Celect: Electrical Circuit DiagramDocumento9 pagineCummins N14 Celect: Electrical Circuit DiagramDiego Lira100% (1)
- Supp Ex On Past Paper Atomic World I (Up To Bonding) (QN)Documento2 pagineSupp Ex On Past Paper Atomic World I (Up To Bonding) (QN)England NgNessuna valutazione finora
- New Iguzzini Products 2009-2010Documento252 pagineNew Iguzzini Products 2009-2010iGuzzini illuminazione SpANessuna valutazione finora
- First Final Examination in Science 7Documento8 pagineFirst Final Examination in Science 7Teresa Marie CorderoNessuna valutazione finora
- CNE 2AC - 341 m3ph @200 M (Sump Depth 2000m)Documento3 pagineCNE 2AC - 341 m3ph @200 M (Sump Depth 2000m)Wibowo ArieNessuna valutazione finora
- Cataloc Online - Purchase RequititionDocumento2 pagineCataloc Online - Purchase RequititionEdy AntoNessuna valutazione finora
- General Navigation Test 2 With AnsDocumento19 pagineGeneral Navigation Test 2 With AnsrohitNessuna valutazione finora