Potrebbero piacerti anche
- Ecf480 FPD 3 2015 2Documento15 pagineEcf480 FPD 3 2015 2richard kapimpaNessuna valutazione finora
- Ecf480 FPD 4 2015 2Documento13 pagineEcf480 FPD 4 2015 2richard kapimpaNessuna valutazione finora
- JWWU LA Lecture 2Documento34 pagineJWWU LA Lecture 2林凱文Nessuna valutazione finora
- University of Zakho Faculty of Education Department of Mathematics Second Stage Semester 4Documento28 pagineUniversity of Zakho Faculty of Education Department of Mathematics Second Stage Semester 4Mohamed bamarniNessuna valutazione finora
- Mathimatics For Finance CH 2Documento11 pagineMathimatics For Finance CH 2Yeabtsega FekaduNessuna valutazione finora
- Ma1506 Tutorial 8: MG EIDocumento2 pagineMa1506 Tutorial 8: MG EIWong JiayangNessuna valutazione finora
- Homework 4: Kernel Methods: Minted ListingsDocumento14 pagineHomework 4: Kernel Methods: Minted ListingsMayur AgrawalNessuna valutazione finora
- Chap 2Documento52 pagineChap 2Lê Vũ Anh NguyễnNessuna valutazione finora
- Chapter TwoDocumento24 pagineChapter TwoKaleab TessemaNessuna valutazione finora
- Lecture 7: Regression: 1.1 Linear ModelDocumento20 pagineLecture 7: Regression: 1.1 Linear ModelKirandeep KaurNessuna valutazione finora
- LA Part1 2in1Documento166 pagineLA Part1 2in1闇玥Nessuna valutazione finora
- Notes On Linear AlgebraDocumento10 pagineNotes On Linear AlgebraManas SNessuna valutazione finora
- Lec3 Structural Data Types in PythonDocumento46 pagineLec3 Structural Data Types in PythonShanti GroverNessuna valutazione finora
- Optimization Techniques: Dr. Muhammad Naeem Dr. Ashfaq AhmedDocumento64 pagineOptimization Techniques: Dr. Muhammad Naeem Dr. Ashfaq AhmedMuhammad Ali Khan AwanNessuna valutazione finora
- Chapter Three Systems of Linear Equations: Dr. Asma AlramleDocumento12 pagineChapter Three Systems of Linear Equations: Dr. Asma AlramleRetaj LibyaNessuna valutazione finora
- Appendix: Mathematical BackgroundDocumento132 pagineAppendix: Mathematical BackgroundDominik SchmidtNessuna valutazione finora
- Lineer Algebra Lecture NotesDocumento100 pagineLineer Algebra Lecture Noteseyyupkaya2003Nessuna valutazione finora
- Homework 2 (Chapters 1 & 2)Documento3 pagineHomework 2 (Chapters 1 & 2)Farhan HussainNessuna valutazione finora
- Matrix AlgebraDocumento41 pagineMatrix Algebralilian landströmNessuna valutazione finora
- MATH219 Lecture 6Documento9 pagineMATH219 Lecture 6Serdar BilgeNessuna valutazione finora
- FALLSEM2019-20 MAT1011 ELA VL2019201004380 Reference Material I 18-Oct-2019 EXP 5BDocumento4 pagineFALLSEM2019-20 MAT1011 ELA VL2019201004380 Reference Material I 18-Oct-2019 EXP 5BdNessuna valutazione finora
- Matrices and Determinants ProjectDocumento5 pagineMatrices and Determinants ProjectkunjapNessuna valutazione finora
- Lab 00 IntroMATLAB2 PDFDocumento11 pagineLab 00 IntroMATLAB2 PDF'Jph Flores BmxNessuna valutazione finora
- Vectors MatricesDocumento15 pagineVectors MatricesSanjeev Neo JaiswalNessuna valutazione finora
- Lesson 11Documento12 pagineLesson 11ebi1234Nessuna valutazione finora
- Edited-Linear Algebra-EditedDocumento112 pagineEdited-Linear Algebra-EditedAwot HaileslassieNessuna valutazione finora
- Matrix CalculusDocumento9 pagineMatrix CalculusWmleaoNessuna valutazione finora
- Matrix Algebra and Random VectorsDocumento37 pagineMatrix Algebra and Random VectorsJonathan HuNessuna valutazione finora
- APPLIED MATHEMATICS I - Chapter 2: Matrices, Determinants and Systems of Linear Equations - by Dr. Tadesse BekeshieDocumento38 pagineAPPLIED MATHEMATICS I - Chapter 2: Matrices, Determinants and Systems of Linear Equations - by Dr. Tadesse BekeshieTadesse B. Gerbaba100% (1)
- 331 Notes MatrixDocumento15 pagine331 Notes MatrixSharifullah ShamimNessuna valutazione finora
- Notes LinearSystemsDocumento33 pagineNotes LinearSystemsRenu KoshalNessuna valutazione finora
- Linear Algebra NotesDocumento15 pagineLinear Algebra NotesKing PowerNessuna valutazione finora
- Chapter 3 Lae1Documento27 pagineChapter 3 Lae1razlan ghazaliNessuna valutazione finora
- Mat334 TD7Documento5 pagineMat334 TD7jethrotabueNessuna valutazione finora
- Chapter 1Documento60 pagineChapter 1Tejas PagareNessuna valutazione finora
- Module 1 Lesson 1 - System of Linear EquationsDocumento6 pagineModule 1 Lesson 1 - System of Linear EquationsAbegail VillanuevaNessuna valutazione finora
- Vector Valued FunctionDocumento15 pagineVector Valued FunctionEncik ComotNessuna valutazione finora
- Assignment-1 (Linear Algebra)Documento3 pagineAssignment-1 (Linear Algebra)DEBOJIT CHATTERJEENessuna valutazione finora
- Signal System AssignmentDocumento5 pagineSignal System Assignment21ELB370MOHAMMAD AREEB HASAN KHANNessuna valutazione finora
- Department of Mathematics MAL 110 (Mathematics I) Tutorial Sheet No. 6 Linear Algebra and MatrixDocumento2 pagineDepartment of Mathematics MAL 110 (Mathematics I) Tutorial Sheet No. 6 Linear Algebra and MatrixKushagra GuptaNessuna valutazione finora
- MIT6 003F11 Lec04 PDFDocumento50 pagineMIT6 003F11 Lec04 PDFMunir KadernaniNessuna valutazione finora
- Guia 03 MathScript - SilesMedranoDocumento10 pagineGuia 03 MathScript - SilesMedranoLiam Siles NuñezNessuna valutazione finora
- Mat RiceDocumento37 pagineMat RiceADITYA SINGHNessuna valutazione finora
- 3: Divide and Conquer: Fourier Transform: PolynomialDocumento8 pagine3: Divide and Conquer: Fourier Transform: PolynomialIrmak ErkolNessuna valutazione finora
- 3: Divide and Conquer: Fourier Transform: PolynomialDocumento8 pagine3: Divide and Conquer: Fourier Transform: PolynomialCajun SefNessuna valutazione finora
- Guia 03 MathScript (2023-04-03) 09.25Documento9 pagineGuia 03 MathScript (2023-04-03) 09.25Gustavo gallegos cornejoNessuna valutazione finora
- MidSem Model Sol2024Documento11 pagineMidSem Model Sol2024rajyash.kgp2.0Nessuna valutazione finora
- 001 - Lecture - 2 - Equilibrium - Matrix AlgebraDocumento36 pagine001 - Lecture - 2 - Equilibrium - Matrix AlgebraSahana NayakaNessuna valutazione finora
- Chapter 4 (5 Lectures)Documento16 pagineChapter 4 (5 Lectures)mayankNessuna valutazione finora
- Business Mathematics CH-2Documento40 pagineBusiness Mathematics CH-2Aynetu TerefeNessuna valutazione finora
- Final Cheet SheetDocumento2 pagineFinal Cheet SheetJorge BerumenNessuna valutazione finora
- 4 Working With Matrices and ArraysDocumento10 pagine4 Working With Matrices and ArraysZakariaNessuna valutazione finora
- (2022-2-GEC-ê Ë ) LN6 - Matrix AlgebraDocumento7 pagine(2022-2-GEC-ê Ë ) LN6 - Matrix Algebra한창현Nessuna valutazione finora
- Eigenvalues and Eigenvectors Vector Spaces Linear Transformations Matrix DiagonalizationDocumento17 pagineEigenvalues and Eigenvectors Vector Spaces Linear Transformations Matrix DiagonalizationphrNessuna valutazione finora
- M1 +Review+of+Mathematical+FoundationsDocumento4 pagineM1 +Review+of+Mathematical+FoundationsKpop HarteuNessuna valutazione finora
- Chap1 1Documento10 pagineChap1 1Jane NdindaNessuna valutazione finora
- Unit 2 Matrix Algebra and Its ApplicationDocumento41 pagineUnit 2 Matrix Algebra and Its ApplicationAbrha63675% (4)
- Matrix Theory and Applications for Scientists and EngineersDa EverandMatrix Theory and Applications for Scientists and EngineersNessuna valutazione finora
- Nonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970Da EverandNonlinear Functional Analysis and Applications: Proceedings of an Advanced Seminar Conducted by the Mathematics Research Center, the University of Wisconsin, Madison, October 12-14, 1970Louis B. RallNessuna valutazione finora
- Transmutation and Operator Differential EquationsDa EverandTransmutation and Operator Differential EquationsNessuna valutazione finora
- Ch-3 RD MathsDocumento112 pagineCh-3 RD MathsThe VRAJ GAMESNessuna valutazione finora
- Wolfram Mathematica Tutorial Collection - Differential Equation Solving With DSolve (2008) (p118)Documento118 pagineWolfram Mathematica Tutorial Collection - Differential Equation Solving With DSolve (2008) (p118)Galeotto Marzio100% (5)
- InequalitiesDocumento18 pagineInequalitiesAzlinda TuahNessuna valutazione finora
- 2023 Paper 34Documento19 pagine2023 Paper 34creatorb2003Nessuna valutazione finora
- TEST 15 (Intermediate Algebra & Statistics)Documento41 pagineTEST 15 (Intermediate Algebra & Statistics)Bblack DeathNessuna valutazione finora
- Exponential Operations and Aggregation Operators of Interval Neutrosophic Sets and Their Decision Making MethodsDocumento18 pagineExponential Operations and Aggregation Operators of Interval Neutrosophic Sets and Their Decision Making MethodsMia AmaliaNessuna valutazione finora
- Fortran Sub Programs Elliptic IntegralDocumento24 pagineFortran Sub Programs Elliptic Integralbefana63Nessuna valutazione finora
- I Year B.SC PaperDocumento22 pagineI Year B.SC PaperMukesh SinghNessuna valutazione finora
- Neurocomputing: Bao-Di Liu, Bin Shen, Liangke Gui, Yu-Xiong Wang, Xue Li, Fei Yan, Yan-Jiang WangDocumento13 pagineNeurocomputing: Bao-Di Liu, Bin Shen, Liangke Gui, Yu-Xiong Wang, Xue Li, Fei Yan, Yan-Jiang WangMeHaK KhAliDNessuna valutazione finora
- Quadratic Equation PDFDocumento54 pagineQuadratic Equation PDFHāřśh Đīxīţ HđNessuna valutazione finora
- Employee Scheduling Methods Using A CalculatorDocumento6 pagineEmployee Scheduling Methods Using A CalculatorMohd Nazri SalimNessuna valutazione finora
- X13 PermutationsDocumento20 pagineX13 PermutationsIvan kayle BatistinNessuna valutazione finora
- Algebra Homework 11 Normal Subgroups, Quotients, Isomorphism Theorems, Classification of Finite Abelian GroupsDocumento3 pagineAlgebra Homework 11 Normal Subgroups, Quotients, Isomorphism Theorems, Classification of Finite Abelian GroupsAlejandroNessuna valutazione finora
- GATE - CS - Engineering MathematicsDocumento33 pagineGATE - CS - Engineering Mathematicsvipi143Nessuna valutazione finora
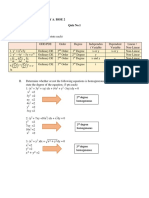
- Ruizo, Charlene Joy A. Bsse 2 Math 121 (Quiz No.1)Documento5 pagineRuizo, Charlene Joy A. Bsse 2 Math 121 (Quiz No.1)Charlene Joy RuizoNessuna valutazione finora
- Expressions and VariablesDocumento1 paginaExpressions and VariablesATLASNessuna valutazione finora
- Level 1 Problem Sheet - Vectors and Solid GeometryDocumento4 pagineLevel 1 Problem Sheet - Vectors and Solid GeometryRanu GamesNessuna valutazione finora
- Mathematics Chapter Wise Assignment For Class 9 Summative Assessment 1 PDFDocumento30 pagineMathematics Chapter Wise Assignment For Class 9 Summative Assessment 1 PDFPrasNessuna valutazione finora
- Control Systems-Lab Manual 11newDocumento4 pagineControl Systems-Lab Manual 11newmanni1220122Nessuna valutazione finora
- Chapter 1 Linear ProgrammingDocumento4 pagineChapter 1 Linear ProgrammingmasyatiNessuna valutazione finora
- MathsBookPart1 PDFDocumento195 pagineMathsBookPart1 PDFSarahNessuna valutazione finora
- Math 26443Documento12 pagineMath 26443Solutions MasterNessuna valutazione finora
- MAP Math10C PolynomialsDocumento8 pagineMAP Math10C PolynomialsMatt Van'Heusen0% (1)
- Matrices PDFDocumento24 pagineMatrices PDFJOHN CHARLASNessuna valutazione finora
- Types of Turing MachinesDocumento12 pagineTypes of Turing Machinesksai.mbNessuna valutazione finora
- App Dynamics - Interview - Experience PDFDocumento9 pagineApp Dynamics - Interview - Experience PDFSangam PatilNessuna valutazione finora
- BCA - S 210: College of Business Studies, AgraDocumento3 pagineBCA - S 210: College of Business Studies, AgraAkash MauryaNessuna valutazione finora
- Books: Book ChaptersDocumento8 pagineBooks: Book ChaptersKumar Keshaw ShahiNessuna valutazione finora
- Solving Exponential Equations Using Logarithms - ChiliMathDocumento6 pagineSolving Exponential Equations Using Logarithms - ChiliMathMelanie AbaldeNessuna valutazione finora
- BLAIR-A Compilation of The Mathematics Leading Doublet Lattice Method-1994Documento138 pagineBLAIR-A Compilation of The Mathematics Leading Doublet Lattice Method-1994AlvaroFernandezVillarNessuna valutazione finora