Potrebbero piacerti anche
- Dispositivos para La Modelación y Control Del Tránsito Por CarreteraDocumento11 pagineDispositivos para La Modelación y Control Del Tránsito Por Carreteramafer castellanosNessuna valutazione finora
- Sensors 21 06344Documento16 pagineSensors 21 06344Erick Francisco Rojas RománNessuna valutazione finora
- Estudios de TránsitoDocumento7 pagineEstudios de Tránsitomilca lozadaNessuna valutazione finora
- Alcance de Software en Modelacion de TransitoDocumento12 pagineAlcance de Software en Modelacion de TransitoDaniel CorderoNessuna valutazione finora
- 4.algoritmo de Compresión de Datos de Tráfico Por Carretera en Series de Tiempo Basado en La Correlación TemporalDocumento15 pagine4.algoritmo de Compresión de Datos de Tráfico Por Carretera en Series de Tiempo Basado en La Correlación TemporalJohan BotiaNessuna valutazione finora
- SOFTWARE LisafirmeDocumento14 pagineSOFTWARE LisafirmeAbdon CastroNessuna valutazione finora
- 222 847 1 SMDocumento9 pagine222 847 1 SMalejandro amenabarNessuna valutazione finora
- Simulacion Com Visum AvanceDocumento19 pagineSimulacion Com Visum AvanceBoris Vasquez LazoNessuna valutazione finora
- Estudio Semaforico Av. Brasil y Manuel PradoDocumento45 pagineEstudio Semaforico Av. Brasil y Manuel PradoLeyla Varas SantillanNessuna valutazione finora
- Sistema de Semaforización Inteligente Como Solución para Intersecciones DeficientesDocumento12 pagineSistema de Semaforización Inteligente Como Solución para Intersecciones DeficientesLuis Sanchez CruzNessuna valutazione finora
- Modelación Virtual Factores Movilidad RotondaDocumento11 pagineModelación Virtual Factores Movilidad RotondaRoss CollantesNessuna valutazione finora
- Detección de Líneas de CarrilDocumento11 pagineDetección de Líneas de CarrilKarlitosmanNessuna valutazione finora
- Análisis Operacional en Vissim para Una IntersecciónDocumento16 pagineAnálisis Operacional en Vissim para Una IntersecciónBryan CancimanceNessuna valutazione finora
- Software TransitoDocumento3 pagineSoftware TransitoAntony Roger Dueñas AguirreNessuna valutazione finora
- Tipos de Aforo VehicularDocumento12 pagineTipos de Aforo VehicularHidai Calleja100% (1)
- Paper Semáforo Inteligente para El Control Del Tránsito VehicularDocumento1 paginaPaper Semáforo Inteligente para El Control Del Tránsito VehicularMario CcoyoriNessuna valutazione finora
- Volumen Tránsito E682 Loja-VilcabambaDocumento25 pagineVolumen Tránsito E682 Loja-Vilcabambayossy benitezNessuna valutazione finora
- Condiciones Tecnico - Ambientales Atmosferico Del Trafico VialDocumento33 pagineCondiciones Tecnico - Ambientales Atmosferico Del Trafico VialHugo FernandezNessuna valutazione finora
- Artículo MBA Optimización de Rutas AlimentadorasDocumento8 pagineArtículo MBA Optimización de Rutas AlimentadorasAC SBNessuna valutazione finora
- CONIITEC 2016 Paper CDocumento7 pagineCONIITEC 2016 Paper CLeonidas Zapata OlivaresNessuna valutazione finora
- AIMSUN Software Simulacion - Ingenieria de TransitoDocumento27 pagineAIMSUN Software Simulacion - Ingenieria de TransitoAlex SanchezNessuna valutazione finora
- Cronograma y MatricesDocumento15 pagineCronograma y MatricesSilvia Magaly CastañedaNessuna valutazione finora
- Grupo N°01Documento45 pagineGrupo N°01MarisolMarinRojasNessuna valutazione finora
- XX Workshop de Investigadores en Ciencias de La Computaci On 838Documento5 pagineXX Workshop de Investigadores en Ciencias de La Computaci On 838AlvaroTrañaNessuna valutazione finora
- CONIITEC - 2016 - Paper - Reconocimiento de Imagenes Visual StudioDocumento7 pagineCONIITEC - 2016 - Paper - Reconocimiento de Imagenes Visual Studiocesar fernando muro velasquezNessuna valutazione finora
- 4 IED04 Estudios de Transito Capacidad y Niveles de Servicio 006Documento6 pagine4 IED04 Estudios de Transito Capacidad y Niveles de Servicio 006Frank Aragón GarciaNessuna valutazione finora
- Grupo N°01Documento45 pagineGrupo N°01MarisolMarinRojasNessuna valutazione finora
- Pasado y Presente en El Diagnóstico de Los Motores en Los Talleres de Servicio Automotor. Del Vacuómetro A Los Sistemas Basados en La NubeDocumento19 paginePasado y Presente en El Diagnóstico de Los Motores en Los Talleres de Servicio Automotor. Del Vacuómetro A Los Sistemas Basados en La Nubecaimcaife2023Nessuna valutazione finora
- Ijhs 9543+4205 4224Documento20 pagineIjhs 9543+4205 4224Cesar UrbizagasteguiNessuna valutazione finora
- Análisis de Consistencia Del Diseño en Una Ruta de La Provincia de CórdobaDocumento17 pagineAnálisis de Consistencia Del Diseño en Una Ruta de La Provincia de CórdobaJorge MariñoNessuna valutazione finora
- Estudio de Viabilidad de Implementación de Semáforos Inteligentes - CDocumento15 pagineEstudio de Viabilidad de Implementación de Semáforos Inteligentes - CMariana Gómez ViloriaNessuna valutazione finora
- Ensayo Movilidad y TransporteDocumento5 pagineEnsayo Movilidad y Transportecajalehemo100% (1)
- 283-Texto Del Artículo-873-1-10-20190604Documento2 pagine283-Texto Del Artículo-873-1-10-20190604Emily GarcíaNessuna valutazione finora
- Softwares TransitoDocumento3 pagineSoftwares TransitoDarkar MolitoNessuna valutazione finora
- Semana 3aDocumento59 pagineSemana 3aJuniors Arhuiz QuispeNessuna valutazione finora
- Semáforos Inteligentes y Tráfico Vehicular: Un Caso de Estudio Comparativo para Reducir Atascos y Emisiones ContaminantesDocumento13 pagineSemáforos Inteligentes y Tráfico Vehicular: Un Caso de Estudio Comparativo para Reducir Atascos y Emisiones ContaminantesRoberto Obregón BarturénNessuna valutazione finora
- Movilidad Sostenible y Segura para ArequipaDocumento26 pagineMovilidad Sostenible y Segura para ArequipaJose Luis Rodriguez BedoyaNessuna valutazione finora
- Expo TesisDocumento13 pagineExpo TesisErick PovedaNessuna valutazione finora
- 2021 MRV EbusesSystems SpanishDocumento42 pagine2021 MRV EbusesSystems SpanishLizeth Maria lizarazoNessuna valutazione finora
- Infrastructures 05 00075 - RemovedDocumento10 pagineInfrastructures 05 00075 - RemovedSucet Adrianzen GarciaNessuna valutazione finora
- 3.metodología para Simular El Flujo de Tráfico Heterogéneo en Las Carreteras Interurbanas en Los Países en Desarrollo El Caso de La Universidad de Carretera en PeshawarDocumento27 pagine3.metodología para Simular El Flujo de Tráfico Heterogéneo en Las Carreteras Interurbanas en Los Países en Desarrollo El Caso de La Universidad de Carretera en PeshawarJohan BotiaNessuna valutazione finora
- Procesamiento de ImágenesDocumento7 pagineProcesamiento de ImágenesPe ErickNessuna valutazione finora
- Telemetría Vehicular Vía InternetDocumento4 pagineTelemetría Vehicular Vía InternetjossjackNessuna valutazione finora
- Aplicaciones para Redes VanetDocumento23 pagineAplicaciones para Redes VanetDiego IdkNessuna valutazione finora
- Referencia2 en EsDocumento8 pagineReferencia2 en EsJason K. RubinNessuna valutazione finora
- Passenger Counting in Mass Public TransportSystems Using Computer Vision and Deep LearningDocumento9 paginePassenger Counting in Mass Public TransportSystems Using Computer Vision and Deep Learningchisco benavidesNessuna valutazione finora
- Alcance de Los Softwares de Modelación en El TransitoDocumento18 pagineAlcance de Los Softwares de Modelación en El TransitoDania Marlen ValenzuelaNessuna valutazione finora
- Retrieve en EsDocumento19 pagineRetrieve en EsHANS MAYCOL VICENTE ALEJANDRONessuna valutazione finora
- Sistemas Inteligentes de TransportesDocumento66 pagineSistemas Inteligentes de TransportesLuis Rivera RiosNessuna valutazione finora
- Proyecto de InvestigacionDocumento7 pagineProyecto de InvestigacionSEBASTIAN DAVID FERNANDEZ VERTELNessuna valutazione finora
- Modelamiento y Desarrollo de Un Semáforo Inteligente Mediante El Uso de Sensores para Regular La Congestión Vehicular en Las Principales Calles de LimaDocumento11 pagineModelamiento y Desarrollo de Un Semáforo Inteligente Mediante El Uso de Sensores para Regular La Congestión Vehicular en Las Principales Calles de LimaPrimus 2018Nessuna valutazione finora
- Aplicación de Los Sig en Logistica y TransporteDocumento17 pagineAplicación de Los Sig en Logistica y TransporteJuan Angel Rod50% (2)
- S01.s01 - Ingeniería de TransporteDocumento22 pagineS01.s01 - Ingeniería de TransporteEdgardDanielCornelioAimitumaNessuna valutazione finora
- Cartilla SensoresDocumento14 pagineCartilla SensoresOmar SilvaNessuna valutazione finora
- Programas de Modelacion de TransitoDocumento3 pagineProgramas de Modelacion de Transitolauraximenauva100% (1)
- Sylabu - Ing. de TransitoDocumento4 pagineSylabu - Ing. de TransitoMercedes SurGutNessuna valutazione finora
- Cod 178-2023-CG 178Documento5 pagineCod 178-2023-CG 178Luis Silva LopezNessuna valutazione finora
- Simuladores de tráfico analizadosDocumento22 pagineSimuladores de tráfico analizadosJorge ChoqueNessuna valutazione finora
- Sistemas Inteligentes de TransporteDocumento5 pagineSistemas Inteligentes de TransporteOlganallelyNessuna valutazione finora
- Diseño con sentido: Planeación de soluciones de diseño para la movilidad, caso del Masivo Integrado de Occidente (MÍO)Da EverandDiseño con sentido: Planeación de soluciones de diseño para la movilidad, caso del Masivo Integrado de Occidente (MÍO)Nessuna valutazione finora
- 3.metodología para Simular El Flujo de Tráfico Heterogéneo en Las Carreteras Interurbanas en Los Países en Desarrollo El Caso de La Universidad de Carretera en PeshawarDocumento27 pagine3.metodología para Simular El Flujo de Tráfico Heterogéneo en Las Carreteras Interurbanas en Los Países en Desarrollo El Caso de La Universidad de Carretera en PeshawarJohan BotiaNessuna valutazione finora
- 2.análisis Sobre La Evolución de Modelo Con Crecimiento Modular de Vía Urbana Estructura de Topología de RedDocumento24 pagine2.análisis Sobre La Evolución de Modelo Con Crecimiento Modular de Vía Urbana Estructura de Topología de RedJohan BotiaNessuna valutazione finora
- 7.la Optimización de La Compresión Fase de Prioridad de Las Señales de Tránsito en Las Intersecciones AisladasDocumento24 pagine7.la Optimización de La Compresión Fase de Prioridad de Las Señales de Tránsito en Las Intersecciones AisladasJohan BotiaNessuna valutazione finora
- InformeDocumento8 pagineInformeJohan BotiaNessuna valutazione finora
- Port AdaDocumento1 paginaPort AdaJohan BotiaNessuna valutazione finora
- TarjetDocumento1 paginaTarjetJohan BotiaNessuna valutazione finora
- 6.control Óptimo de La Señal de Tráfico Bajo El Equilibrio Dinámico Del UsuarioDocumento51 pagine6.control Óptimo de La Señal de Tráfico Bajo El Equilibrio Dinámico Del UsuarioJohan BotiaNessuna valutazione finora
- Hoja de Observaciones Base 1Documento1 paginaHoja de Observaciones Base 1Johan BotiaNessuna valutazione finora
- CartografíaDocumento1 paginaCartografíaJohan BotiaNessuna valutazione finora
- Landsat: Introducción a la teledetección con satélitesDocumento40 pagineLandsat: Introducción a la teledetección con satélitesCesar Huamani AyalaNessuna valutazione finora
- Conversion EsDocumento11 pagineConversion EsJohan BotiaNessuna valutazione finora
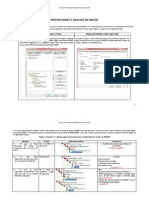
- Proyecciones ArcgisDocumento7 pagineProyecciones ArcgisWalther GalanNessuna valutazione finora
- Doc3 Nirmas ApaDocumento8 pagineDoc3 Nirmas ApaJohan BotiaNessuna valutazione finora
- CurvasDocumento9 pagineCurvasJohan BotiaNessuna valutazione finora
- Tablas de DatosDocumento1 paginaTablas de DatosJohan BotiaNessuna valutazione finora
- Comput Ariza DaDocumento2 pagineComput Ariza DaJohan BotiaNessuna valutazione finora
- LG Tone Ultra Hbs-800 User Guide (Spanish)Documento22 pagineLG Tone Ultra Hbs-800 User Guide (Spanish)Ruben Moises Inga Cordova100% (2)
- APN de Movistar, Digitel y Movilnet en Android (Actualizado) - MovilVEDocumento120 pagineAPN de Movistar, Digitel y Movilnet en Android (Actualizado) - MovilVEIvan Venegas0% (1)
- Servicios WWW, IntranetDocumento14 pagineServicios WWW, IntranetSamuel SilvaNessuna valutazione finora
- Ficha - 23 - Com V CicloDocumento3 pagineFicha - 23 - Com V CicloNoemí CerdánNessuna valutazione finora
- Smartphone Adiccion Perez 2012Documento30 pagineSmartphone Adiccion Perez 2012ShlbNessuna valutazione finora
- 21 Experiencias de Sistemas de Alerta Temprana en América LatinaDocumento143 pagine21 Experiencias de Sistemas de Alerta Temprana en América Latinaandreuss1982Nessuna valutazione finora
- Consejos de Seguridad de Guardaespaldas Profesionales Que Todos Los Viajeros Pueden UsarDocumento56 pagineConsejos de Seguridad de Guardaespaldas Profesionales Que Todos Los Viajeros Pueden UsarAnonymous pOggsIhOMNessuna valutazione finora
- Ecu 911 PDFDocumento8 pagineEcu 911 PDFSamantha TrujilloNessuna valutazione finora
- Actividades recreativas y adicción a celulares en CuscoDocumento12 pagineActividades recreativas y adicción a celulares en CuscoFlor DayanaNessuna valutazione finora
- MXH-201 para WebDocumento19 pagineMXH-201 para WebNiht GonzálezNessuna valutazione finora
- Sistemas de PagoDocumento15 pagineSistemas de PagoJka MontNessuna valutazione finora
- Manual de Estandarización de Ayuda - Humanitaria - ColombiaDocumento268 pagineManual de Estandarización de Ayuda - Humanitaria - ColombiaJuan Santiago BotelloNessuna valutazione finora
- Belen Aleyda Medina Rojas Sistema Educativo Superior LatinoamericanoDocumento4 pagineBelen Aleyda Medina Rojas Sistema Educativo Superior LatinoamericanoAleyda MedinaNessuna valutazione finora
- Proyecto de Grado Luis AdrianDocumento21 pagineProyecto de Grado Luis AdrianSEgundo Manuel Oña MayorgaNessuna valutazione finora
- Ciber AcosoDocumento37 pagineCiber Acosodamianjr100% (1)
- (PD) Presentaciones - Telefonia Movil - PpsDocumento38 pagine(PD) Presentaciones - Telefonia Movil - PpsCarlos Andres Morales CorderoNessuna valutazione finora
- Dispositivos Móviles para El AprendizajeDocumento3 pagineDispositivos Móviles para El AprendizajeMiguel Ángel Suvires GarcíaNessuna valutazione finora
- Cómo funcionan los teléfonos móviles: comunicación inalámbrica a través de redes de celdasDocumento4 pagineCómo funcionan los teléfonos móviles: comunicación inalámbrica a través de redes de celdasINTERNET DRAGONETNessuna valutazione finora
- Cuestionario Capitulo 1 Networking Essentials 2 SabadosDocumento6 pagineCuestionario Capitulo 1 Networking Essentials 2 SabadosDoug Chet0% (1)
- Tu Plan: Fecha de Vencimiento 09-Dic-2023Documento2 pagineTu Plan: Fecha de Vencimiento 09-Dic-2023alex LovepiaNessuna valutazione finora
- Afiche Sobre El Uso Del CelularDocumento4 pagineAfiche Sobre El Uso Del CelularRacso Chingay BustamanteNessuna valutazione finora
- Comunicación y LenguajeDocumento7 pagineComunicación y LenguajeGabriela SiñanesNessuna valutazione finora
- Implementación de red celular 3CXDocumento12 pagineImplementación de red celular 3CXWilliam Andrés Nemogá BecerraNessuna valutazione finora
- Contrato RedBancDocumento34 pagineContrato RedBancCesar Aco ViNessuna valutazione finora
- Terminos Condiciones BizumDocumento11 pagineTerminos Condiciones BizumVladi RodriguezNessuna valutazione finora
- Uso de Equipos y Sistemas Multimedia en El Proceso de Aprendizaje EnseñanzaDocumento16 pagineUso de Equipos y Sistemas Multimedia en El Proceso de Aprendizaje EnseñanzaJOSE171173100% (1)
- LTE Optimization Engineering Handbook 1-50.en - EsDocumento50 pagineLTE Optimization Engineering Handbook 1-50.en - EsCarlos100% (4)
- Billetera MovilDocumento8 pagineBilletera Movilyadira silvaNessuna valutazione finora
- Intel Dossier Antonio Horacio Stiuso.Documento89 pagineIntel Dossier Antonio Horacio Stiuso.Francisco Esteban Cardenas MirandaNessuna valutazione finora
- COLORESDocumento3 pagineCOLORESDina Carcausto Luque100% (1)