Potrebbero piacerti anche
- LS-DYNA Tie-Break Contacts Modeling GuideDocumento33 pagineLS-DYNA Tie-Break Contacts Modeling Guidemr.aikido100% (2)
- Elements in Ls Dyna PDFDocumento70 pagineElements in Ls Dyna PDFEren KalayNessuna valutazione finora
- LS-PrePost Intro 2014Documento143 pagineLS-PrePost Intro 2014mohsenNessuna valutazione finora
- Ls DynaDocumento33 pagineLs DynaRajNessuna valutazione finora
- 10 Session19and20 LS-DYNA3Documento71 pagine10 Session19and20 LS-DYNA3Chandra ClarkNessuna valutazione finora
- 08 Session15and16 LS-DYNA1Documento32 pagine08 Session15and16 LS-DYNA1vinod reddy mNessuna valutazione finora
- Element Type LS-DYNADocumento7 pagineElement Type LS-DYNAاحمد تسنیمNessuna valutazione finora
- LS-DYNA Concrete MaterialDocumento3 pagineLS-DYNA Concrete MaterialaktcNessuna valutazione finora
- Predictive Engineering Ls-Dyna BrochureDocumento16 paginePredictive Engineering Ls-Dyna BrochureSumit SehgalNessuna valutazione finora
- LS Dyna NotesDocumento61 pagineLS Dyna NotesDeepak C. RajwarNessuna valutazione finora
- LS-Dyna Impact Analysis TutorialDocumento29 pagineLS-Dyna Impact Analysis Tutorialsravis69100% (1)
- LS DYNA Basic CardsDocumento30 pagineLS DYNA Basic Cardsmadblaster100% (1)
- Implicit Simulations With Ls Dyna Introduction andDocumento36 pagineImplicit Simulations With Ls Dyna Introduction andVirginija BortkevičienėNessuna valutazione finora
- Prevent Negative Volume in Foam ModelsDocumento9 paginePrevent Negative Volume in Foam ModelsGustavo Yippeekayyay GusNessuna valutazione finora
- Contact Modelling in LSDYNADocumento35 pagineContact Modelling in LSDYNASidharth PothalNessuna valutazione finora
- Manual For LS-DYNA Wood Material Model 143Documento53 pagineManual For LS-DYNA Wood Material Model 143DraganNessuna valutazione finora
- Lab #1 Introduction To LSDyna: Simple CantileverDocumento22 pagineLab #1 Introduction To LSDyna: Simple CantileverMohammed A. MaherNessuna valutazione finora
- Airbag Simulation With Ls-DynaDocumento25 pagineAirbag Simulation With Ls-Dynasaketh ReddyNessuna valutazione finora
- LS Dyna Tutorial FEADocumento16 pagineLS Dyna Tutorial FEAsravis69Nessuna valutazione finora
- LS Dyna Ice Load TutorialDocumento23 pagineLS Dyna Ice Load TutorialEren KalayNessuna valutazione finora
- Ls Dyna BeamsDocumento18 pagineLs Dyna BeamsAleem Ullah CheemaNessuna valutazione finora
- LSDYNA Basic NotesDocumento83 pagineLSDYNA Basic NotesJayDeep Khajure100% (1)
- Guidelines Modeling LS DynaDocumento20 pagineGuidelines Modeling LS DynaOscar Alonso AlonsoNessuna valutazione finora
- Implicit NewerDocumento207 pagineImplicit NewerThutchai PhoNessuna valutazione finora
- LS-DYNA Introductory Oct 30 Nov 1-2012Documento328 pagineLS-DYNA Introductory Oct 30 Nov 1-2012unmeshNessuna valutazione finora
- LS-PrePost Intro 2016Documento138 pagineLS-PrePost Intro 2016Ray FaiersNessuna valutazione finora
- LS-PrePost Intro 073012Documento368 pagineLS-PrePost Intro 073012Saad Al HelyNessuna valutazione finora
- Explicit Contents LectureDocumento21 pagineExplicit Contents LectureBrian Egan100% (1)
- 16.1 - EXPLICIT Solver RadiossDocumento10 pagine16.1 - EXPLICIT Solver RadiossDev Kumar DevaNessuna valutazione finora
- LS-DYNA Non-linear Implicit - Overview of Implicit Analysis in LS-DYNADocumento28 pagineLS-DYNA Non-linear Implicit - Overview of Implicit Analysis in LS-DYNAAref AbadelNessuna valutazione finora
- 05 2016 02 DYNAmore Infotag Implizit TipsTricksDocumento32 pagine05 2016 02 DYNAmore Infotag Implizit TipsTricksPeter ZubarikNessuna valutazione finora
- 3.0 Material Modeling Guidelines-V11-1 PDFDocumento33 pagine3.0 Material Modeling Guidelines-V11-1 PDFRahul MahajanNessuna valutazione finora
- LS-DYNA Crash Box Tutorial: Rectangular Impact AnalysisDocumento33 pagineLS-DYNA Crash Box Tutorial: Rectangular Impact AnalysisAgus Wijaya0% (1)
- Dubois BookDocumento506 pagineDubois BookkasreedharNessuna valutazione finora
- Implicit Analysis Intro 02-2011Documento50 pagineImplicit Analysis Intro 02-2011Jhony GolombieskiNessuna valutazione finora
- Abaqus PDFDocumento25 pagineAbaqus PDFthiyakiNessuna valutazione finora
- Scalar and Vectorized User Defined Material Routines in LS-DYNADocumento52 pagineScalar and Vectorized User Defined Material Routines in LS-DYNATirumala Rao100% (1)
- V6 SIMULIA Learning PathsDocumento13 pagineV6 SIMULIA Learning Pathsafsajghfd1Nessuna valutazione finora
- 13 Seat Belt Anchorage Analysis (ECER14)Documento6 pagine13 Seat Belt Anchorage Analysis (ECER14)JayDeep KhajureNessuna valutazione finora
- LS Dyna TipsDocumento5 pagineLS Dyna TipsSaravanakumar_INessuna valutazione finora
- LS-DYNA contact modeling guideDocumento11 pagineLS-DYNA contact modeling guidePunith MlNessuna valutazione finora
- Workbench LS DYNADocumento16 pagineWorkbench LS DYNARoss WaringNessuna valutazione finora
- Sec2 Solid Composites 021712Documento35 pagineSec2 Solid Composites 021712Jamshid PishdadiNessuna valutazione finora
- Nastran in A NutshellDocumento32 pagineNastran in A NutshelljmorlierNessuna valutazione finora
- Course Project Report On LS-DYNADocumento26 pagineCourse Project Report On LS-DYNAShikhar KothariNessuna valutazione finora
- A Study Guide: Released 2nd Edition 09/2018Documento159 pagineA Study Guide: Released 2nd Edition 09/2018vinod reddy mNessuna valutazione finora
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsDa EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNessuna valutazione finora
- Viscoelastic Structures: Mechanics of Growth and AgingDa EverandViscoelastic Structures: Mechanics of Growth and AgingNessuna valutazione finora
- Mat54 ManualDocumento12 pagineMat54 ManualNHades100% (1)
- Kompsat2,3,3A - Imagery Products Order Form - v4.0Documento4 pagineKompsat2,3,3A - Imagery Products Order Form - v4.0Vincent BLANQUENessuna valutazione finora
- FLP Dpi 20FSDocumento2 pagineFLP Dpi 20FSprashil.honeywellNessuna valutazione finora
- Interface and Density Profiling PresentationDocumento50 pagineInterface and Density Profiling PresentationheriNessuna valutazione finora
- Exposure CalculationDocumento2 pagineExposure CalculationVipin PeterNessuna valutazione finora
- RT Technique Sheet + Report Rev 4Documento2 pagineRT Technique Sheet + Report Rev 4g_sancheti100% (2)
- KTT Aw4 BDocumento12 pagineKTT Aw4 BGeng ShenNessuna valutazione finora
- MF1SEP (H) 10x1: 1. General DescriptionDocumento17 pagineMF1SEP (H) 10x1: 1. General DescriptionLeandro Consentino FerreiraNessuna valutazione finora
- Panta Flat WireDocumento25 paginePanta Flat WireTechnoCommercial2 OfficeNessuna valutazione finora
- Metsec Purlins PDFDocumento13 pagineMetsec Purlins PDFRiyaadh SatarNessuna valutazione finora
- Scopemeter Test Tools Selection Guide: 190C Color Scopemeter Series 190B Scopemeter Series Fluke 120 SeriesDocumento1 paginaScopemeter Test Tools Selection Guide: 190C Color Scopemeter Series 190B Scopemeter Series Fluke 120 SeriesmehralsmenschNessuna valutazione finora
- One Degree of Freedom Resonance Wave Energy ConvertorDocumento11 pagineOne Degree of Freedom Resonance Wave Energy ConvertorMr PolashNessuna valutazione finora
- Vibration Analysis of Functionally Graded Microbeams With A Moving Mass Based On Timoshenko Beam TheoryDocumento14 pagineVibration Analysis of Functionally Graded Microbeams With A Moving Mass Based On Timoshenko Beam TheoryMr PolashNessuna valutazione finora
- The Need To Evaluate Reliability Based Fatigue Data AnalysisDocumento5 pagineThe Need To Evaluate Reliability Based Fatigue Data AnalysisMr PolashNessuna valutazione finora
- Extreme Value Analysis of Istanbul Air Pollution DataDocumento10 pagineExtreme Value Analysis of Istanbul Air Pollution DataMr PolashNessuna valutazione finora
- Overview of Utilization of Steel SlagDocumento11 pagineOverview of Utilization of Steel Slagdariolaica3000Nessuna valutazione finora
- Environmental Aspect of Ferrochrome ProductionDocumento10 pagineEnvironmental Aspect of Ferrochrome ProductionMr PolashNessuna valutazione finora
- Use of Recycled Aggregate Concrete: Mr. Tushar R Sonawane, Prof. Dr. Sunil S. PimplikarDocumento8 pagineUse of Recycled Aggregate Concrete: Mr. Tushar R Sonawane, Prof. Dr. Sunil S. PimplikarRebeca CristinaNessuna valutazione finora
- Study On Flexural Fatigue Performance and Damage Laws of Hybrid Fiber Reinforced ConcreteDocumento5 pagineStudy On Flexural Fatigue Performance and Damage Laws of Hybrid Fiber Reinforced ConcreteMr PolashNessuna valutazione finora
- Flexural-Fatigue Properties of Sustainable Pervious Concrete Pavement Material Containing Ground Tire Rubber and Silica FumeDocumento16 pagineFlexural-Fatigue Properties of Sustainable Pervious Concrete Pavement Material Containing Ground Tire Rubber and Silica FumeMr PolashNessuna valutazione finora
- Flexural Fatigue Durability of Selected Unreinforced Structural Lightweight ConcretesDocumento25 pagineFlexural Fatigue Durability of Selected Unreinforced Structural Lightweight ConcretesMr PolashNessuna valutazione finora
- 3874 0809 11 PDFDocumento6 pagine3874 0809 11 PDFRamadi NuzulNessuna valutazione finora
- .Analysis and Design of Multistory Building Using ETABS 2017Documento18 pagine.Analysis and Design of Multistory Building Using ETABS 2017Mr PolashNessuna valutazione finora
- Levels of Heavy Metals in Wastewater and Soil Samples From Open Drainage Channels in Nairobi, Kenya: Community Health ImplicationDocumento13 pagineLevels of Heavy Metals in Wastewater and Soil Samples From Open Drainage Channels in Nairobi, Kenya: Community Health ImplicationMr PolashNessuna valutazione finora
- The Challenges of Green Construction in OmanDocumento9 pagineThe Challenges of Green Construction in OmanMr PolashNessuna valutazione finora
- Slags in Ferroalloys ProductionDocumento10 pagineSlags in Ferroalloys ProductionQuinton Dean ChingokaNessuna valutazione finora
- ====Documento7 pagine====ddNessuna valutazione finora
- Effects of Size and Shape On Thermodynamic Properties of NanomaterialsDocumento8 pagineEffects of Size and Shape On Thermodynamic Properties of NanomaterialsMr PolashNessuna valutazione finora
- Importance of Construction Sequence Analysis in Design of High Rise BuildingDocumento9 pagineImportance of Construction Sequence Analysis in Design of High Rise BuildingKhuất Trần ThanhNessuna valutazione finora
- Response of Modified Fertilizers On Yield, Yield Attributing Parameters and Nutrient Uptake of Rice (Oryza Sativa) in Rice - Wheat Cropping SystemDocumento10 pagineResponse of Modified Fertilizers On Yield, Yield Attributing Parameters and Nutrient Uptake of Rice (Oryza Sativa) in Rice - Wheat Cropping SystemMr PolashNessuna valutazione finora
- 108 PDFDocumento9 pagine108 PDFMr PolashNessuna valutazione finora
- Effects of Size and Shape On Thermodynamic Properties of NanomaterialsDocumento8 pagineEffects of Size and Shape On Thermodynamic Properties of NanomaterialsMr PolashNessuna valutazione finora
- Bendixen Et Al 2019 NatSusDocumento8 pagineBendixen Et Al 2019 NatSusMr PolashNessuna valutazione finora
- Towards The Accuracy Inmedical InstrumentDocumento5 pagineTowards The Accuracy Inmedical InstrumentMr PolashNessuna valutazione finora
- Slags in Ferroalloys Production-Review of Present Knowledge: L. Holappa and Y. XiaoDocumento10 pagineSlags in Ferroalloys Production-Review of Present Knowledge: L. Holappa and Y. XiaoMr PolashNessuna valutazione finora
- M0509083087 PDFDocumento5 pagineM0509083087 PDFMr PolashNessuna valutazione finora
- Development of Normal Strength Concrete Using Ferrochrome Slag Aggregate As Replacement To Coarse AggregateDocumento4 pagineDevelopment of Normal Strength Concrete Using Ferrochrome Slag Aggregate As Replacement To Coarse AggregateMr PolashNessuna valutazione finora
- Towards The Accuracy Inmedical InstrumentDocumento5 pagineTowards The Accuracy Inmedical InstrumentMr PolashNessuna valutazione finora
- Effects of Temperature On ConcreteDocumento10 pagineEffects of Temperature On ConcreteMr PolashNessuna valutazione finora
- Irjet V5i11287 PDFDocumento7 pagineIrjet V5i11287 PDFMr PolashNessuna valutazione finora
- Study On Strength Properties of FerrochromeDocumento6 pagineStudy On Strength Properties of FerrochromeMr PolashNessuna valutazione finora
- Vortex Care & SafetyDocumento37 pagineVortex Care & SafetyRodel FadroganeNessuna valutazione finora
- Fast Moving Filter and VbeltDocumento72 pagineFast Moving Filter and Vbeltgreicel marianjas sihombingNessuna valutazione finora
- Lesson Plan Me 100 Basics of Mechanical Engineering 2-1-0-3 Course ObjectivesDocumento4 pagineLesson Plan Me 100 Basics of Mechanical Engineering 2-1-0-3 Course ObjectivesAjeshSomanPulladNessuna valutazione finora
- Chiller T&C ProcedureDocumento11 pagineChiller T&C ProcedureOanh NguyenNessuna valutazione finora
- EPL Lab ManualDocumento74 pagineEPL Lab ManualPrince Vineeth67% (3)
- Sine Waves: Phase Shift & General FormDocumento17 pagineSine Waves: Phase Shift & General FormKaren DoddNessuna valutazione finora
- The Magpie's NestDocumento1 paginaThe Magpie's NestSuraini Iteng YatimNessuna valutazione finora
- PackingDocumento23 paginePackingpeach5100% (3)
- Unisuite PheDocumento2 pagineUnisuite PheUnilabNessuna valutazione finora
- MEGGER DET 5 - 4 EARTH TESTER - Manual PDFDocumento72 pagineMEGGER DET 5 - 4 EARTH TESTER - Manual PDFBenabidNessuna valutazione finora
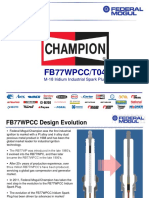
- FB77WPCC/T04: M-18 Iridium Industrial Spark PlugDocumento11 pagineFB77WPCC/T04: M-18 Iridium Industrial Spark PlugAlexanderNessuna valutazione finora
- Machinery Breakdown InsuranceDocumento20 pagineMachinery Breakdown InsuranceRumman Arshad DarNessuna valutazione finora
- A Cost-Effective Design and Analysis of an LLC Resonant ConverterDocumento8 pagineA Cost-Effective Design and Analysis of an LLC Resonant ConverterNguyễn Duy ThứcNessuna valutazione finora
- Liquid Crystal ColloidsDocumento313 pagineLiquid Crystal ColloidsyyyyyyyNessuna valutazione finora
- VM 3156 Eriez Feeder Model HS46 HS66 IOMDocumento12 pagineVM 3156 Eriez Feeder Model HS46 HS66 IOMMaintenanceNessuna valutazione finora
- Quick Start Guide for Twin Tec TC88 Twin Cam IgnitionDocumento2 pagineQuick Start Guide for Twin Tec TC88 Twin Cam Ignitionhrrt GarageNessuna valutazione finora
- Notice: Consumer Products Energy Conservation Program: Daikin U.S. Corp. Residential Air Conditioner and Heat Pump Procedures WaiverDocumento6 pagineNotice: Consumer Products Energy Conservation Program: Daikin U.S. Corp. Residential Air Conditioner and Heat Pump Procedures WaiverJustia.comNessuna valutazione finora
- 9-2 Wiring Diagram Sistem: 1: Kendaraan Dilengkapi Dengan Sistem Immobiliser 2: Kendaraan A/TDocumento1 pagina9-2 Wiring Diagram Sistem: 1: Kendaraan Dilengkapi Dengan Sistem Immobiliser 2: Kendaraan A/Tindra wahyu hidayatNessuna valutazione finora
- Geothermal Energy NCESDocumento71 pagineGeothermal Energy NCESAdarsh ShuklaNessuna valutazione finora
- LT AutostartDocumento4 pagineLT AutostartAngel MartinezNessuna valutazione finora
- Komatsu D85 A-21 Crawler Tractor PDFDocumento2 pagineKomatsu D85 A-21 Crawler Tractor PDFrandy patah asbiNessuna valutazione finora
- Performance of UV-Vis SpectrophotometersDocumento6 paginePerformance of UV-Vis SpectrophotometersHuong ZamNessuna valutazione finora
- Installation, Operation and Maintenance Instructions: Penberthy Model Tme MixerDocumento4 pagineInstallation, Operation and Maintenance Instructions: Penberthy Model Tme MixerGuillermo MartinezNessuna valutazione finora
- June 2017 MS - Paper 1 Edexcel Physics As-LevelDocumento18 pagineJune 2017 MS - Paper 1 Edexcel Physics As-LevelMark UgbelaseNessuna valutazione finora
- Ten KasiDocumento152 pagineTen KasiR AbishekNessuna valutazione finora
- Motors Efficiency Standards & Regulations LAFERTDocumento6 pagineMotors Efficiency Standards & Regulations LAFERTRoberto Becerra RiveraNessuna valutazione finora
- Midea CAC Aqua Tempo Super II Series (DC Inverter Air-Cooled Chiller)Documento5 pagineMidea CAC Aqua Tempo Super II Series (DC Inverter Air-Cooled Chiller)ikac3Nessuna valutazione finora
- Imo Acg Manual MecánicoDocumento12 pagineImo Acg Manual MecánicoAdolfo BurgosNessuna valutazione finora
- Tom MDocumento98 pagineTom MChetanya93Nessuna valutazione finora