Potrebbero piacerti anche
- Repaso General IntegradorDocumento9 pagineRepaso General IntegradorFede Martinez100% (3)
- Guia Codesys LadderDocumento21 pagineGuia Codesys Ladderalexm4Nessuna valutazione finora
- Los Riesgos en Redes de Computadoras-Gabriela MatosDocumento3 pagineLos Riesgos en Redes de Computadoras-Gabriela MatosVictoriano Dominguez Henriquez100% (1)
- Reporte 4Documento3 pagineReporte 4Olber Guzmán RNessuna valutazione finora
- Informe Laboratorio Sistemas MicroprocesadosDocumento21 pagineInforme Laboratorio Sistemas MicroprocesadosAgneliusNessuna valutazione finora
- Programación de Microcontroladores en CDocumento58 pagineProgramación de Microcontroladores en CDaniel Andres Segura TamayoNessuna valutazione finora
- First ReportDocumento3 pagineFirst ReportOlber Guzmán RNessuna valutazione finora
- 0.1 Instructivo - de - Instalacion - y - Manejo - de - CodeBlocksDocumento20 pagine0.1 Instructivo - de - Instalacion - y - Manejo - de - CodeBlocksDomingo PerezNessuna valutazione finora
- ROS - Raspberry Pi 3b Led - Server - Py and Led - ClientDocumento9 pagineROS - Raspberry Pi 3b Led - Server - Py and Led - ClientEdgar OvalleNessuna valutazione finora
- TC - Implementación de Tecnologías Sockets, Persistencia de Datos y TransaccionesDocumento13 pagineTC - Implementación de Tecnologías Sockets, Persistencia de Datos y TransaccionesDavid Gómez M.0% (2)
- Villoria Quiñones Pablo ADA1 InstalacionOpencvDocumento4 pagineVilloria Quiñones Pablo ADA1 InstalacionOpencvVilloria AlbertoNessuna valutazione finora
- Practica 1 ContadorDocumento10 paginePractica 1 ContadorMarcos David Pérez QuintoNessuna valutazione finora
- Tutorial I - Prender y Apagar Un LedDocumento7 pagineTutorial I - Prender y Apagar Un LedKelly Johnson100% (1)
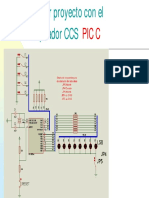
- TEMA - 4 Mi Primer Proyecto en PIC CDocumento18 pagineTEMA - 4 Mi Primer Proyecto en PIC Canon_691946022Nessuna valutazione finora
- Trabajo de MicrocontroladoresDocumento10 pagineTrabajo de MicrocontroladoresiwefferNessuna valutazione finora
- Inf6 MaldonadoJ CPR2Documento8 pagineInf6 MaldonadoJ CPR2Kevin VillavicencioNessuna valutazione finora
- Programacion Pics en C - Guia Rapida 2011Documento44 pagineProgramacion Pics en C - Guia Rapida 2011nelson sevillano zuñigaNessuna valutazione finora
- Paso5 Grupo33 Nayibe IjajiDocumento26 paginePaso5 Grupo33 Nayibe IjajiDavid TeranNessuna valutazione finora
- Proyecto Sistemas Distribuidos-3Documento6 pagineProyecto Sistemas Distribuidos-3santiagovalenciab28_Nessuna valutazione finora
- Alcivar Helen - Lab2Documento9 pagineAlcivar Helen - Lab2Helen AlcivarNessuna valutazione finora
- Laboratorio 7 - 2019 CodesysDocumento30 pagineLaboratorio 7 - 2019 CodesysMarco Antonio Pampa CondoriNessuna valutazione finora
- TP 4Documento9 pagineTP 4Abraham GutierrezNessuna valutazione finora
- Guia Chat NodejsDocumento41 pagineGuia Chat Nodejslmora_270918Nessuna valutazione finora
- Manual Instalacion OpenCV & CodeBlocksDocumento9 pagineManual Instalacion OpenCV & CodeBlocksXANDERNessuna valutazione finora
- Conceptos de ROSDocumento7 pagineConceptos de ROSValentina Vega MahechaNessuna valutazione finora
- Spartan 6 ISEDocumento3 pagineSpartan 6 ISEricardo jimenezNessuna valutazione finora
- Binder 2Documento22 pagineBinder 2Gustavo RiosNessuna valutazione finora
- Guia Deploy Heroku - TextoDocumento10 pagineGuia Deploy Heroku - TextoErick Alan Luna GarciaNessuna valutazione finora
- Labview & PicDocumento43 pagineLabview & Piclucian lunaNessuna valutazione finora
- DISEÑO DETALLADO-LaboratorioIIDocumento37 pagineDISEÑO DETALLADO-LaboratorioIICamilo SamboniNessuna valutazione finora
- Taller de Redes SDN 3Documento25 pagineTaller de Redes SDN 3Anonymous kaBcbFD5UNessuna valutazione finora
- Guia III Manejo de Base de Datos ConDocumento12 pagineGuia III Manejo de Base de Datos ConKaty B. De la RosaNessuna valutazione finora
- Creación de API REST NodeJS - TypeScript - MongoDB - MongooseDocumento12 pagineCreación de API REST NodeJS - TypeScript - MongoDB - MongooseMauricio Josué AreasNessuna valutazione finora
- Aprendiendo A Programar PICDocumento21 pagineAprendiendo A Programar PICjoseluis5914Nessuna valutazione finora
- Lab 06 - Instalacion y Administracion de Las Librerias para Las Aplicaciones WebDocumento13 pagineLab 06 - Instalacion y Administracion de Las Librerias para Las Aplicaciones WebMax Cristofer Martinez SaavedraNessuna valutazione finora
- Tarea Practica Dos BandasDocumento20 pagineTarea Practica Dos BandasOscar GuillenNessuna valutazione finora
- Tutorial Hi Tech 2Documento12 pagineTutorial Hi Tech 2José HeinNessuna valutazione finora
- Prep6 MaldonadoJ CPR2Documento8 paginePrep6 MaldonadoJ CPR2Kevin VillavicencioNessuna valutazione finora
- Proyecto CodeblocksDocumento25 pagineProyecto CodeblocksJessi Aguilera100% (1)
- Lab 04 - Introducción A PythonDocumento13 pagineLab 04 - Introducción A PythonHeydi Melissa Huacasi CcapatintaNessuna valutazione finora
- Leccion 32 ComposerDocumento13 pagineLeccion 32 Composermarioaje3463Nessuna valutazione finora
- Guía para Utilizar El CodeBlockDocumento8 pagineGuía para Utilizar El CodeBlockcarlosNessuna valutazione finora
- Guía 1 - Codesys - Ladder PDFDocumento21 pagineGuía 1 - Codesys - Ladder PDFRossellPumaNessuna valutazione finora
- Aprendiendo Aprogramar PIC Con CCSDocumento58 pagineAprendiendo Aprogramar PIC Con CCSAndres Raul Bruno SaraviaNessuna valutazione finora
- Conexion Usb Con Visual BasicDocumento10 pagineConexion Usb Con Visual BasicEng JesusNessuna valutazione finora
- Tutorial de CDocumento190 pagineTutorial de CMaiman LatoNessuna valutazione finora
- Manual Basico de Smart-Test (Batch)Documento15 pagineManual Basico de Smart-Test (Batch)Cristian CasaresNessuna valutazione finora
- Introducción A Dev C++Documento122 pagineIntroducción A Dev C++Luis David Bedoya RestrepoNessuna valutazione finora
- Informes RDL en WPF: Rocío Gómez Caro I.E.S. Francisco Rodríguez MarínDocumento32 pagineInformes RDL en WPF: Rocío Gómez Caro I.E.S. Francisco Rodríguez MarínRocio Gomez CaroNessuna valutazione finora
- Lab05 Micro 21II PuertosDocumento5 pagineLab05 Micro 21II PuertosFRANK KENYI HUAMAN HUILLCANessuna valutazione finora
- Sistemas EmbebidosDocumento11 pagineSistemas EmbebidoscarmoralitoNessuna valutazione finora
- Práctica 3Documento12 paginePráctica 3pedromaniac77Nessuna valutazione finora
- Code Blocks 1Documento50 pagineCode Blocks 1Reyna CamachoNessuna valutazione finora
- Lab2 RoboticaDocumento21 pagineLab2 RoboticaMauricio DuqueNessuna valutazione finora
- Informe 2Documento13 pagineInforme 2FaustoPolancoAriasNessuna valutazione finora
- Comunicación USB Con El PIC PIC18F4550 - Ejemplo Clase CDCDocumento4 pagineComunicación USB Con El PIC PIC18F4550 - Ejemplo Clase CDCpipealg09100% (1)
- Programación en C Con CSSDocumento77 pagineProgramación en C Con CSSDanny FernandoNessuna valutazione finora
- LabonetDocumento11 pagineLabonetchristian villaresNessuna valutazione finora
- Laboratorio 3 - SCRDocumento5 pagineLaboratorio 3 - SCRdahsgdNessuna valutazione finora
- Laboratorio 3 - SCRDocumento5 pagineLaboratorio 3 - SCRdahsgdNessuna valutazione finora
- Universidad Catolica BolivianaDocumento10 pagineUniversidad Catolica BolivianadahsgdNessuna valutazione finora
- Estabilidad de Un Cuerpo FlotanteDocumento4 pagineEstabilidad de Un Cuerpo FlotantedahsgdNessuna valutazione finora
- Manual Poo PygtkDocumento145 pagineManual Poo PygtkEduard PerdomoNessuna valutazione finora
- Brochure Camaras de Seguridad BaaoDocumento18 pagineBrochure Camaras de Seguridad Baaodeyby arrambideNessuna valutazione finora
- A9 GSGDocumento5 pagineA9 GSGgonzalo sanchezNessuna valutazione finora
- Cuadernillo Regletas Preescolar Leove Ortega Oct-2021Documento32 pagineCuadernillo Regletas Preescolar Leove Ortega Oct-2021lcaro.preescolarNessuna valutazione finora
- Segunda Entrega Gestion de La InformacionDocumento12 pagineSegunda Entrega Gestion de La InformacionJovisNessuna valutazione finora
- Plantillas para Notas de RemisionDocumento5 paginePlantillas para Notas de RemisionMelani LópezNessuna valutazione finora
- Mapa MentalDocumento1 paginaMapa Mentalwilmer fabian avila gomezNessuna valutazione finora
- ASTM - D624 - Resistencia Ao RasgamentoDocumento2 pagineASTM - D624 - Resistencia Ao RasgamentovanessaNessuna valutazione finora
- LeemeDocumento2 pagineLeemeVruddhi MehtaNessuna valutazione finora
- Unidad IiDocumento10 pagineUnidad Iitodo animeNessuna valutazione finora
- Capítulo 7Documento70 pagineCapítulo 7Wilo GuamanNessuna valutazione finora
- Descripción, Alcance, MetodologíaDocumento5 pagineDescripción, Alcance, MetodologíaFrancisco Joel CevallosNessuna valutazione finora
- Almacenamiento y Recuperacion de La Informacion1Documento5 pagineAlmacenamiento y Recuperacion de La Informacion1Valentina YaritNessuna valutazione finora
- MANUAL DE OPERACIONES CLUB AEREO DE CHILLAN (Actualizado Al 26-09-22)Documento64 pagineMANUAL DE OPERACIONES CLUB AEREO DE CHILLAN (Actualizado Al 26-09-22)Pablo Antonio Jara Bolivar100% (1)
- Automatizacion y Control de Criaderos de Pollos de GranjaDocumento95 pagineAutomatizacion y Control de Criaderos de Pollos de GranjaCelso Montano HurtadoNessuna valutazione finora
- Tsmec MP1 2017Documento220 pagineTsmec MP1 2017tics041Nessuna valutazione finora
- C 52 D 78Documento4 pagineC 52 D 78Said PedrazaNessuna valutazione finora
- TEMARIO Lenguajedeprog Invierno2014Documento3 pagineTEMARIO Lenguajedeprog Invierno2014Alex Onofre OnofreNessuna valutazione finora
- Fase3 SergiomuñozDocumento7 pagineFase3 SergiomuñozSERGIO ANDRES MUÑOZ LIZARAZONessuna valutazione finora
- Guía Teoria - de - MuestreoDocumento88 pagineGuía Teoria - de - MuestreoJessicaNessuna valutazione finora
- 13 Metodología Híbrida RUPDocumento63 pagine13 Metodología Híbrida RUPJUAN EDUARDO ALAVEDRA SIMBRONNessuna valutazione finora
- Contactos Mujeres Putas Baratas Getafe en MadridDocumento2 pagineContactos Mujeres Putas Baratas Getafe en MadridEncontrar pareja en MadridNessuna valutazione finora
- Planilla de SueldoDocumento5 paginePlanilla de Sueldojosè MendozaNessuna valutazione finora
- Apuntes 2Documento54 pagineApuntes 2Herón Molina LozanoNessuna valutazione finora
- Proyecto Gestion de Costos - Alejandro Diaz MartinezDocumento14 pagineProyecto Gestion de Costos - Alejandro Diaz MartinezAlejandro Diaz MartinezNessuna valutazione finora
- Guia de Laboratorio 1 Ol - Modelos de Programación LinealDocumento8 pagineGuia de Laboratorio 1 Ol - Modelos de Programación LinealSebastian CastroNessuna valutazione finora
- Guia Normas APA 7ma EdicionDocumento57 pagineGuia Normas APA 7ma EdicionJhon Alexander Buitrago Pulido0% (1)
- Ejercicio Cargando SistemaDocumento8 pagineEjercicio Cargando SistemaMax LemusNessuna valutazione finora