Potrebbero piacerti anche
- Calidad AreliDocumento2 pagineCalidad AreliArturo Arias MartinezNessuna valutazione finora
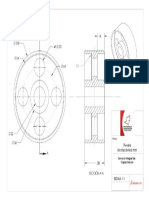
- RuedaDocumento1 paginaRuedaArturo Arias MartinezNessuna valutazione finora
- Tecnicas 11Documento3 pagineTecnicas 11Arturo Arias MartinezNessuna valutazione finora
- Cap7 BuenisimoDocumento6 pagineCap7 BuenisimoArturo Arias MartinezNessuna valutazione finora
- Diseño de Zapato 3D A 2DDocumento2 pagineDiseño de Zapato 3D A 2DArturo Arias MartinezNessuna valutazione finora
- Acta de Agua PotableDocumento1 paginaActa de Agua PotableArturo Arias MartinezNessuna valutazione finora
- Tema 1.1-1.2Documento4 pagineTema 1.1-1.2Arturo Arias MartinezNessuna valutazione finora
- PiezaDocumento2 paginePiezaArturo Arias MartinezNessuna valutazione finora
- Guía Examen xB-II-G PDFDocumento18 pagineGuía Examen xB-II-G PDFElmer De Jesus Rojas Camacho0% (1)
- DinamicaDocumento2 pagineDinamicaArturo Arias MartinezNessuna valutazione finora
- Formulario DinamicaDocumento2 pagineFormulario DinamicaArturo Arias MartinezNessuna valutazione finora
- Alfredo Orozco Rodríguez: EstudiosDocumento1 paginaAlfredo Orozco Rodríguez: EstudiosArturo Arias MartinezNessuna valutazione finora
- Cultivo de ÑameDocumento36 pagineCultivo de ÑameYasser Alan Bultrón100% (3)
- Agrot de CultivosDocumento47 pagineAgrot de CultivosJenyffer CorreaNessuna valutazione finora
- Variables en El Proceso de LixiviaciónDocumento55 pagineVariables en El Proceso de LixiviaciónJocelyn A. Colque TerrazasNessuna valutazione finora
- Naan GoteoDocumento24 pagineNaan GoteoDavid Conde CopaNessuna valutazione finora
- Diseño de Sistema de Riego-AndradeDocumento42 pagineDiseño de Sistema de Riego-AndradeJhonatan AndradeNessuna valutazione finora
- Delgado Reátegui Diana Soledad y Jara Córdova Karol EsthefanyDocumento118 pagineDelgado Reátegui Diana Soledad y Jara Córdova Karol Esthefanyalex julianNessuna valutazione finora
- Calculo de Cantidad y Tiempo de RiegoDocumento2 pagineCalculo de Cantidad y Tiempo de RiegoMiguel Salas100% (8)
- Harina de PescadoDocumento17 pagineHarina de PescadoANDREA VANESSA ROJAS VARGASNessuna valutazione finora
- Productos VenriegoDocumento60 pagineProductos VenriegoMarlon GonzalezNessuna valutazione finora
- MODULO FORMATIVO - AGROPECUARIA-borradorDocumento175 pagineMODULO FORMATIVO - AGROPECUARIA-borradorJusto Miguel Quispe AymeNessuna valutazione finora
- Costo de Producción de 100 Hectáreas de Caña de Azúcar VenezuelaDocumento14 pagineCosto de Producción de 100 Hectáreas de Caña de Azúcar Venezuelaandres valleNessuna valutazione finora
- Ejercicios Resueltos2Documento31 pagineEjercicios Resueltos2JORGE SAUL MURO YESQUENNessuna valutazione finora
- Mi Propia Huerta Módulo 3Documento26 pagineMi Propia Huerta Módulo 3gabi156Nessuna valutazione finora
- Riego Localizado: Diseño Y EvaluaciónDocumento52 pagineRiego Localizado: Diseño Y EvaluaciónMjimdetorgmail.com JimenNessuna valutazione finora
- Diseño Hidráulico RIEGO A GOTEO.Documento16 pagineDiseño Hidráulico RIEGO A GOTEO.Doris CarrascoNessuna valutazione finora
- Instructivo para Instalar El Equipo de Riego Por GoteoDocumento12 pagineInstructivo para Instalar El Equipo de Riego Por GoteoAlex RondoyNessuna valutazione finora
- Riegos de PastizalesDocumento2 pagineRiegos de PastizalesVictorGimenesRiveroNessuna valutazione finora
- Guia Tecnica Manejo y Aprovechamiento de Agua Con Fines AgropecuariosDocumento127 pagineGuia Tecnica Manejo y Aprovechamiento de Agua Con Fines AgropecuariosAntonio OrtizNessuna valutazione finora
- Decapitacion de FloresDocumento3 pagineDecapitacion de FloresGuilmer D. YanquiNessuna valutazione finora
- Riego Por Goteo en Caña de Azúcar 20 Años de Experiencia. N Uner. NETAFIM. Israel.1Documento84 pagineRiego Por Goteo en Caña de Azúcar 20 Años de Experiencia. N Uner. NETAFIM. Israel.1cristinaa56100% (3)
- Criterios de Selección de Un Sistema de RiegoDocumento32 pagineCriterios de Selección de Un Sistema de RiegoHector Gpe Rangel RodriguezNessuna valutazione finora
- Producción OrgánicaDocumento30 pagineProducción OrgánicaOjo de AguaNessuna valutazione finora
- Validacion Del Potencial Productivo de Chiles Ancho y Picosos Del Sur de SinaloaDocumento23 pagineValidacion Del Potencial Productivo de Chiles Ancho y Picosos Del Sur de SinaloaHammy RubalcavaNessuna valutazione finora
- INTA CRMendoza-SanJuan EEASanJuan OlguinPringles A Evaluacion Integral Del Desempeño Del Metodo de RiegoDocumento180 pagineINTA CRMendoza-SanJuan EEASanJuan OlguinPringles A Evaluacion Integral Del Desempeño Del Metodo de RiegoEdwin QuisbertNessuna valutazione finora
- Cómo Instalar Un Sistema de Riego Por GoteoDocumento3 pagineCómo Instalar Un Sistema de Riego Por GoteoLee Hye Park MinNessuna valutazione finora
- Manual Mantencion y Operacion de Equipos de Riego270911Documento33 pagineManual Mantencion y Operacion de Equipos de Riego270911Daniel Sandoval RojasNessuna valutazione finora
- Diapositivas Riego GoteoDocumento19 pagineDiapositivas Riego GoteoGuillermo CorreaNessuna valutazione finora
- FERTICONTROLDocumento8 pagineFERTICONTROLJavier LaverdeNessuna valutazione finora
- Evalaucion Tecnica para Sistema de Riego AutomatizadoDocumento58 pagineEvalaucion Tecnica para Sistema de Riego AutomatizadoPablo Alejandro Rojas BarrientosNessuna valutazione finora
- Tab 6 Modulo 5 1 V1 - 1Documento34 pagineTab 6 Modulo 5 1 V1 - 1evillalobos9672Nessuna valutazione finora