Potrebbero piacerti anche
- Mechatronics Important QuestionsDocumento2 pagineMechatronics Important QuestionsMr.G.Chandrasekar mechanicalstaffNessuna valutazione finora
- Mechtronics Question Papers 25082010Documento9 pagineMechtronics Question Papers 25082010Dhurai RajNessuna valutazione finora
- ME2401 Mechatronics QBDocumento9 pagineME2401 Mechatronics QBkarthiksubramanian94Nessuna valutazione finora
- ME2401 Mechatronics QBDocumento9 pagineME2401 Mechatronics QBkarthiksubramanian94Nessuna valutazione finora
- Department of Mechanical-Iv Year Me-2401 Mechatronics Question BankDocumento20 pagineDepartment of Mechanical-Iv Year Me-2401 Mechatronics Question BankrkNessuna valutazione finora
- Mechatronics Question BankDocumento2 pagineMechatronics Question BankDebabrata Paul100% (2)
- Tutorial Sheet: Design of Mechatronic SystemsDocumento7 pagineTutorial Sheet: Design of Mechatronic Systemschris2grima2844Nessuna valutazione finora
- Question Bank Me2401Documento13 pagineQuestion Bank Me2401Anonymous p8bHAAxNessuna valutazione finora
- Emm 2,16M U1-5 WoDocumento7 pagineEmm 2,16M U1-5 WovvnprabhuNessuna valutazione finora
- Question Bank of ChemistryDocumento6 pagineQuestion Bank of ChemistryShweta GajbhiyeNessuna valutazione finora
- A.K.T Memorial College of Engineering and Technology Department of Mechanical Engineering ME2401 Mechatronics Question Bank Unit-I (2-MARK)Documento8 pagineA.K.T Memorial College of Engineering and Technology Department of Mechanical Engineering ME2401 Mechatronics Question Bank Unit-I (2-MARK)Mani KandanNessuna valutazione finora
- UntitledDocumento6 pagineUntitledAllimuthu AlliNessuna valutazione finora
- 20ME919 - Mechatronics Important Question For ESE NewDocumento6 pagine20ME919 - Mechatronics Important Question For ESE NewCAD With RaoNessuna valutazione finora
- Me 2401 Mechatronics Important 16 Marks Unit - 5 Design of Mechatronics SystemDocumento3 pagineMe 2401 Mechatronics Important 16 Marks Unit - 5 Design of Mechatronics Systemsasithar jaisankaranNessuna valutazione finora
- rOBOTICS Unit-2,3Documento2 paginerOBOTICS Unit-2,3dsathiyaNessuna valutazione finora
- Department of Mechanical Engineering Me6504 Engineering Metrology and Measurement Question BankDocumento7 pagineDepartment of Mechanical Engineering Me6504 Engineering Metrology and Measurement Question BankFlorence MercyNessuna valutazione finora
- A - Two Mark QuestionsDocumento2 pagineA - Two Mark QuestionsAnonymous p8bHAAxNessuna valutazione finora
- ME 1402 - Mechatronics PDFDocumento6 pagineME 1402 - Mechatronics PDFnagarajanceNessuna valutazione finora
- Mechatronics Question BankDocumento9 pagineMechatronics Question BankVishwas ShettyNessuna valutazione finora
- INS UNIT Wise Important QuestionsDocumento3 pagineINS UNIT Wise Important QuestionsChintu ChethanNessuna valutazione finora
- Me 2401 Mechatronics 1-5 Important QuestionsDocumento4 pagineMe 2401 Mechatronics 1-5 Important QuestionsvasanthavananNessuna valutazione finora
- Revision QuestionsDocumento6 pagineRevision QuestionsSooraj KumarNessuna valutazione finora
- ME 1402 - Mechatronics PDFDocumento6 pagineME 1402 - Mechatronics PDFHiru Purushothaman HirudayanathanNessuna valutazione finora
- 6 I&s 3160620 Gtu QBDocumento2 pagine6 I&s 3160620 Gtu QBHARSH HAMIRANINessuna valutazione finora
- Velammal Engineering College Department of Production Engineering ME 2401 Mechat RonicsDocumento10 pagineVelammal Engineering College Department of Production Engineering ME 2401 Mechat RonicsAnonymous p8bHAAxNessuna valutazione finora
- Assignment Questions of Mechatronics (ETAT-403)Documento1 paginaAssignment Questions of Mechatronics (ETAT-403)Arvind SharmaNessuna valutazione finora
- Subject Code / Name: ME6504 Metrology and Measurements Unit-I Basics of Metrology Part-A (2 Marks)Documento4 pagineSubject Code / Name: ME6504 Metrology and Measurements Unit-I Basics of Metrology Part-A (2 Marks)Rohit MunaNessuna valutazione finora
- Question BankDocumento7 pagineQuestion BankFlorence MercyNessuna valutazione finora
- Mechatronics: Subject Title: Mechatronics Subject Code: M-Hours Per Week: 04 Hours Per Semester: 64Documento14 pagineMechatronics: Subject Title: Mechatronics Subject Code: M-Hours Per Week: 04 Hours Per Semester: 64Mohammed IrshadNessuna valutazione finora
- 6 I&s 3160620 QB 2022Documento2 pagine6 I&s 3160620 QB 2022HARSH HAMIRANINessuna valutazione finora
- Department of Mechanical Engineering Metrology and Measurement (18me505) Question BankDocumento12 pagineDepartment of Mechanical Engineering Metrology and Measurement (18me505) Question Bankkuppani abhiNessuna valutazione finora
- Mechotronics Important QuesDocumento8 pagineMechotronics Important QuesYoosuf AhaNessuna valutazione finora
- DMS QB 2015 RDocumento8 pagineDMS QB 2015 RKeerthe VaasanNessuna valutazione finora
- Oan551 Sensors and Transducers 1840897986 Oan551 SsatDocumento11 pagineOan551 Sensors and Transducers 1840897986 Oan551 SsatSenthil kumar NatarajanNessuna valutazione finora
- Question Bank Mechatronics and Microprocessor: Unit-1 Introduction To Mechatronic SystemsDocumento4 pagineQuestion Bank Mechatronics and Microprocessor: Unit-1 Introduction To Mechatronic SystemsAkash AkuNessuna valutazione finora
- Measurements and Instrumentation Question BankDocumento4 pagineMeasurements and Instrumentation Question BankSurya SekaranNessuna valutazione finora
- Adaptive Control Question Bank Without Answer KeyDocumento5 pagineAdaptive Control Question Bank Without Answer KeyMATHANKUMAR.S100% (1)
- Question BankDocumento2 pagineQuestion Banknaveennaveen78072Nessuna valutazione finora
- Unit - V: Sensors and Transducers: 8. Define Strain Gauge. Define Gauge FactorDocumento4 pagineUnit - V: Sensors and Transducers: 8. Define Strain Gauge. Define Gauge FactorJayaram KrishnaNessuna valutazione finora
- Subject: Industrial Instrumentation Question BankDocumento1 paginaSubject: Industrial Instrumentation Question Bankmanan desaiNessuna valutazione finora
- Ramapuram Campus, Chennai - 600 089Documento2 pagineRamapuram Campus, Chennai - 600 089Ruby SmithNessuna valutazione finora
- Me2401 Mechatronics - 2 Marks With AnswerDocumento15 pagineMe2401 Mechatronics - 2 Marks With Answermagesh.mxNessuna valutazione finora
- EI2303 Industrial Instrumentation 2Documento6 pagineEI2303 Industrial Instrumentation 2Ramanathan SunderNessuna valutazione finora
- MecDocumento5 pagineMecRajesh Kumar PNessuna valutazione finora
- Me2401 Mechatronics - 2 Marks With Answer PDFDocumento15 pagineMe2401 Mechatronics - 2 Marks With Answer PDFSiva RamanNessuna valutazione finora
- MECHATRONICS 2marksDocumento2 pagineMECHATRONICS 2marksRaj BharathNessuna valutazione finora
- Question Bank 03062016Documento7 pagineQuestion Bank 03062016Babu NarayananNessuna valutazione finora
- Mechatronics QBDocumento25 pagineMechatronics QBKarthik Perumal SwamyNessuna valutazione finora
- Question Bank (MMM)Documento5 pagineQuestion Bank (MMM)rahulNessuna valutazione finora
- Rajalakshmi Engineering College: Thandalam, Chennai - 602 105 Question BankDocumento6 pagineRajalakshmi Engineering College: Thandalam, Chennai - 602 105 Question Bankbramesh_31Nessuna valutazione finora
- 4.mechanical Measurements and MetrologyDocumento6 pagine4.mechanical Measurements and MetrologyVikram Rao100% (1)
- Question Bank Unit-I Mechatronics, Sensor and Transducers (2 Mark Questions)Documento11 pagineQuestion Bank Unit-I Mechatronics, Sensor and Transducers (2 Mark Questions)saravananNessuna valutazione finora
- S7 Question Bank: Department of Mechnaical EngineeringDocumento20 pagineS7 Question Bank: Department of Mechnaical EngineeringLola darlingNessuna valutazione finora
- 2 Mark Question BankDocumento6 pagine2 Mark Question BankjeyansanthiNessuna valutazione finora
- Mechatronics Q & ADocumento3 pagineMechatronics Q & ASelvaNessuna valutazione finora
- Multivariable Predictive Control: Applications in IndustryDa EverandMultivariable Predictive Control: Applications in IndustryNessuna valutazione finora
- Sensitivity Methods in Control Theory: Proceedings of an International Symposium Held at Dubrovnik, August 31–September 5, 1964Da EverandSensitivity Methods in Control Theory: Proceedings of an International Symposium Held at Dubrovnik, August 31–September 5, 1964L. RadanovićNessuna valutazione finora
- Slides For CLass 1 EMDDocumento49 pagineSlides For CLass 1 EMDKuppan Chetty RamanathanNessuna valutazione finora
- Building Automation Lab Exercise 1Documento39 pagineBuilding Automation Lab Exercise 1Kuppan Chetty RamanathanNessuna valutazione finora
- Pneumatic and Hydraulic Actuation Systems-UNITIIDocumento44 paginePneumatic and Hydraulic Actuation Systems-UNITIIKuppan Chetty RamanathanNessuna valutazione finora
- UNIT III - System Building Blocks, Models and Closed Loop ControllersDocumento122 pagineUNIT III - System Building Blocks, Models and Closed Loop ControllersKuppan Chetty RamanathanNessuna valutazione finora
- Mechanical and Electrical Actuation Systems - UNIT II SECOND HALFDocumento87 pagineMechanical and Electrical Actuation Systems - UNIT II SECOND HALFKuppan Chetty RamanathanNessuna valutazione finora
- UNIT V-Programmable Peripheral InterfaceDocumento28 pagineUNIT V-Programmable Peripheral InterfaceKuppan Chetty RamanathanNessuna valutazione finora
- UNIT IV-COntroller and AlgorithmsDocumento47 pagineUNIT IV-COntroller and AlgorithmsKuppan Chetty RamanathanNessuna valutazione finora
- Chapter-5 Iot Platform Design MethodologyDocumento28 pagineChapter-5 Iot Platform Design MethodologyKuppan Chetty Ramanathan60% (5)
- Performance Characteristics of Sensors and Actuators PDFDocumento40 paginePerformance Characteristics of Sensors and Actuators PDFKuppan Chetty RamanathanNessuna valutazione finora
- IOT ARduino PDFDocumento84 pagineIOT ARduino PDFKuppan Chetty RamanathanNessuna valutazione finora
- CH - 9 - Frequency Response - 2022Documento145 pagineCH - 9 - Frequency Response - 2022鄭又嘉Nessuna valutazione finora
- Cooper - Bussmann FWP 50A14F Datasheet PDFDocumento443 pagineCooper - Bussmann FWP 50A14F Datasheet PDFLimuel EspirituNessuna valutazione finora
- Solution:: Fig. 2 Shows The Required Common Base ConnectionDocumento9 pagineSolution:: Fig. 2 Shows The Required Common Base ConnectionSwathi Gudivada100% (1)
- 49995installation Manual DEH-P4400 20031171550266300Documento6 pagine49995installation Manual DEH-P4400 20031171550266300juanNessuna valutazione finora
- Transistor Circuit Diagram of 2sa1943 and 2sc5200Documento68 pagineTransistor Circuit Diagram of 2sa1943 and 2sc5200Eliecer GonzalezNessuna valutazione finora
- Application of OP-Amp As Summing Amplifier, Integrator and Differentiator - Electronics PostDocumento7 pagineApplication of OP-Amp As Summing Amplifier, Integrator and Differentiator - Electronics PostDurga DeviNessuna valutazione finora
- ConclusionDocumento6 pagineConclusionDiana Jane Terez Lazaro63% (8)
- Question: 4.83 The Op Amp in The Precision Recti Er Circuit of Fig. P4.83 Is IDocumento1 paginaQuestion: 4.83 The Op Amp in The Precision Recti Er Circuit of Fig. P4.83 Is ISsebass PozzoNessuna valutazione finora
- Three-Phase Brushless Motor Pre-Drivers For Paper FeedDocumento25 pagineThree-Phase Brushless Motor Pre-Drivers For Paper FeedBruce MichaelNessuna valutazione finora
- User's Manual: Ac Position Control SystemDocumento20 pagineUser's Manual: Ac Position Control SystemAaryaveerNessuna valutazione finora
- VOL 5 Pulse GeneratorsDocumento755 pagineVOL 5 Pulse Generatorsgorods5rtNessuna valutazione finora
- Anlog Electronics Circuits TheoryDocumento6 pagineAnlog Electronics Circuits TheoryVikram RaoNessuna valutazione finora
- IAM Instrumentation Training Tutorial3Documento17 pagineIAM Instrumentation Training Tutorial3Industrial Automation and MechatronicsNessuna valutazione finora
- Radar 2009 A - 17 Transmitters and ReceiversDocumento84 pagineRadar 2009 A - 17 Transmitters and Receiverseasvc2000Nessuna valutazione finora
- Telephone Exchange SystemDocumento7 pagineTelephone Exchange SystemkellechaiNessuna valutazione finora
- NAD 310 Amplifier DatasheetDocumento2 pagineNAD 310 Amplifier DatasheetcoolestkiwiNessuna valutazione finora
- Designing With PH ElectrodesDocumento7 pagineDesigning With PH ElectrodesSupatmono NAINessuna valutazione finora
- A11-019 Toshiba R410Documento241 pagineA11-019 Toshiba R410list16947Nessuna valutazione finora
- 05 GaN HEMT and MMICs ChalmersDocumento25 pagine05 GaN HEMT and MMICs Chalmers475976550Nessuna valutazione finora
- Casio M 100Documento13 pagineCasio M 100Georges TaradauxNessuna valutazione finora
- Grammar File IDocumento163 pagineGrammar File IIvan Dujlovic0% (1)
- Signal Generator Project StatementDocumento16 pagineSignal Generator Project StatementHussain Bin AliNessuna valutazione finora
- SPL300 - SPL400: Stereo Power AmplifierDocumento14 pagineSPL300 - SPL400: Stereo Power AmplifiervedatNessuna valutazione finora
- An Instrument For Audiophile Speaker Builders: Sergej KoschuchDocumento8 pagineAn Instrument For Audiophile Speaker Builders: Sergej KoschuchAlessandro BiliottiNessuna valutazione finora
- Tsa Manual enDocumento12 pagineTsa Manual enAntonik DirectsoundNessuna valutazione finora
- Jameco Part Number 842961: Distributed byDocumento16 pagineJameco Part Number 842961: Distributed byVishwas ReddyNessuna valutazione finora
- IC BA5979S DatasheetDocumento11 pagineIC BA5979S Datasheetnaupas007Nessuna valutazione finora
- EI1000ADP Brochure EDocumento4 pagineEI1000ADP Brochure EmritsoudisNessuna valutazione finora
- DPM 30-300 Service ManualDocumento136 pagineDPM 30-300 Service ManualFreddy Viera Espinoza100% (2)
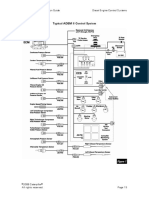
- Typical ADEM II Control System: Application and Installation Guide Diesel Engine Control SystemsDocumento10 pagineTypical ADEM II Control System: Application and Installation Guide Diesel Engine Control SystemsPaulo MandingaNessuna valutazione finora