Potrebbero piacerti anche
- Automatic ThresholdingDocumento18 pagineAutomatic ThresholdingMuhammad Usman KhanNessuna valutazione finora
- CH 2 Raster Scan GraphicsDocumento23 pagineCH 2 Raster Scan GraphicskanchangawndeNessuna valutazione finora
- Itc Unit-IiiDocumento58 pagineItc Unit-IiiAbhishek BoseNessuna valutazione finora
- Electronically Tunable Chaotic Oscillators Using OTA-C Derived From Jerk ModelDocumento23 pagineElectronically Tunable Chaotic Oscillators Using OTA-C Derived From Jerk ModelKhunanon KarawanichNessuna valutazione finora
- CS2252 MPMC 16marksDocumento135 pagineCS2252 MPMC 16marksVaishnavi RaveNessuna valutazione finora
- 573 - Chapter 3 - Attributes of Graphics PrimitivesDocumento13 pagine573 - Chapter 3 - Attributes of Graphics Primitivesmazengiya100% (2)
- Digital Image ProcessingDocumento15 pagineDigital Image ProcessingDeepak GourNessuna valutazione finora
- FrescoDocumento50 pagineFrescoAdithya Vardhan Reddy Kothwal PatelNessuna valutazione finora
- Coding & Decoding Huffman With MatlabDocumento6 pagineCoding & Decoding Huffman With MatlabRizky Dwi PutraNessuna valutazione finora
- DSP Lect Note - 6th Sem Etc - PNGDocumento91 pagineDSP Lect Note - 6th Sem Etc - PNGwapota4898Nessuna valutazione finora
- Multi Resolution Based Fusion Using Discrete Wavelet Transform.Documento27 pagineMulti Resolution Based Fusion Using Discrete Wavelet Transform.saranrajNessuna valutazione finora
- BM2406 Digital Image Processing Lab ManualDocumento107 pagineBM2406 Digital Image Processing Lab ManualDeepak DennisonNessuna valutazione finora
- Predictive PDFDocumento5 paginePredictive PDFKrishanu ModakNessuna valutazione finora
- PSD of Pulse Coding Techniques With MatlabDocumento7 paginePSD of Pulse Coding Techniques With MatlabNithin MukeshNessuna valutazione finora
- CG VivaDocumento10 pagineCG VivaSantOsh JamaDarNessuna valutazione finora
- SCSA3015 Deep Learning Unit 4 PDFDocumento30 pagineSCSA3015 Deep Learning Unit 4 PDFpooja vikirthiniNessuna valutazione finora
- Module - 5: 8051 Interfacing: SyllabusDocumento30 pagineModule - 5: 8051 Interfacing: SyllabusM.KNessuna valutazione finora
- Data Flow ModellingDocumento23 pagineData Flow ModellingGiri ReddyNessuna valutazione finora
- PrepInsta Infosys 28th Sep Slot Analysis, Questions and AnswersDocumento62 paginePrepInsta Infosys 28th Sep Slot Analysis, Questions and AnswersJatin YadavNessuna valutazione finora
- Implementation and Bit Error Rate Analysis of BPSK Modulation and Demodulation Technique Using MATLABDocumento5 pagineImplementation and Bit Error Rate Analysis of BPSK Modulation and Demodulation Technique Using MATLABseventhsensegroupNessuna valutazione finora
- MAC and HDTVDocumento7 pagineMAC and HDTVKaran Singh PanwarNessuna valutazione finora
- Design of Roba Multiplier Using Mac UnitDocumento15 pagineDesign of Roba Multiplier Using Mac UnitindiraNessuna valutazione finora
- To Design An Adaptive Channel Equalizer Using MATLABDocumento43 pagineTo Design An Adaptive Channel Equalizer Using MATLABAngel Pushpa100% (1)
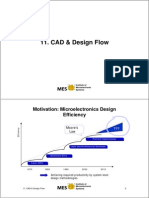
- CAD & Design Flow: Motivation: Microelectronics Design EfficiencyDocumento18 pagineCAD & Design Flow: Motivation: Microelectronics Design EfficiencyJubin JainNessuna valutazione finora
- Ee-323 Digital Signal Processing Complex Engineering Problem (Cep)Documento23 pagineEe-323 Digital Signal Processing Complex Engineering Problem (Cep)Rubina KhattakNessuna valutazione finora
- Digital Image Processing MCQDocumento5 pagineDigital Image Processing MCQBhawini RajNessuna valutazione finora
- CB19742 IT Workshop (Scilab Matlab)Documento2 pagineCB19742 IT Workshop (Scilab Matlab)bhuvangatesNessuna valutazione finora
- Machine Learning NNDocumento16 pagineMachine Learning NNMegha100% (1)
- Unit IiDocumento61 pagineUnit IiNikhilSinghNessuna valutazione finora
- Assignment2 40168195Documento10 pagineAssignment2 40168195saumya11599100% (1)
- PointersDocumento23 paginePointersGursewak Singh0% (1)
- Rectangular WaveguideDocumento5 pagineRectangular WaveguideSarveenaNessuna valutazione finora
- Eca NotesDocumento220 pagineEca NotesKiranmai KonduruNessuna valutazione finora
- CS610 Quiz No. 02 (Lect. 32-Lect.45)Documento22 pagineCS610 Quiz No. 02 (Lect. 32-Lect.45)AqsaNessuna valutazione finora
- Ec 1034 - Digital Image ProcessingDocumento15 pagineEc 1034 - Digital Image ProcessingSudharsan PadmanabhanNessuna valutazione finora
- Digital Image Processing - 2 Marks-Questions and AnswersDocumento19 pagineDigital Image Processing - 2 Marks-Questions and AnswersnikitatayaNessuna valutazione finora
- Image Enhancement: Images Courtesy: Digital Image Processing FOURTH EDITION, Rafael C. Gonzalez - Richard E. WoodsDocumento130 pagineImage Enhancement: Images Courtesy: Digital Image Processing FOURTH EDITION, Rafael C. Gonzalez - Richard E. Woodskparisa05Nessuna valutazione finora
- Introduction To Machine Learning Week 2 AssignmentDocumento8 pagineIntroduction To Machine Learning Week 2 AssignmentAkash barapatreNessuna valutazione finora
- 6.digital Image ProcessingDocumento62 pagine6.digital Image ProcessingVirat EkboteNessuna valutazione finora
- MicroProgram SequencerDocumento10 pagineMicroProgram SequencerashtonNessuna valutazione finora
- Unit 2 Ppt-Digitial Image ProcessingDocumento24 pagineUnit 2 Ppt-Digitial Image ProcessingVino SkyNessuna valutazione finora
- University of Mumbai MCQ QUESTION BANK (100 Questions) : Middleware Firmware Package System Software MiddlewareDocumento16 pagineUniversity of Mumbai MCQ QUESTION BANK (100 Questions) : Middleware Firmware Package System Software MiddlewarePoornima GhodkeNessuna valutazione finora
- One Pass AssemblerDocumento2 pagineOne Pass Assemblers_k_bahugunaNessuna valutazione finora
- Vlsi Implementation For High Speed AddersDocumento6 pagineVlsi Implementation For High Speed AddersPardha Saradhi Damarla100% (1)
- Colour ModelsDocumento6 pagineColour ModelsPIYUSH PAWAR100% (1)
- Neural Network Unsupervised Machine Learning: What Are Autoencoders?Documento22 pagineNeural Network Unsupervised Machine Learning: What Are Autoencoders?shubh agrawalNessuna valutazione finora
- Digital Communication Line Codes PDFDocumento7 pagineDigital Communication Line Codes PDFAzImmNessuna valutazione finora
- Unit - 5 Image Enhancement in Spatial DomainDocumento26 pagineUnit - 5 Image Enhancement in Spatial DomainJeethan100% (1)
- Lecture Solved Problems On K-MapDocumento57 pagineLecture Solved Problems On K-MapHugh100% (1)
- Ee 8351 DLC 2018Documento312 pagineEe 8351 DLC 2018kanakarajNessuna valutazione finora
- Basics of Image ProcessingDocumento38 pagineBasics of Image ProcessingKarthick VijayanNessuna valutazione finora
- BM2406 Digital Image Processing Lab ManualDocumento24 pagineBM2406 Digital Image Processing Lab ManualDeepak DennisonNessuna valutazione finora
- Color FeatureDocumento3 pagineColor Featureart101988Nessuna valutazione finora
- Color Space: Color Model Colors Tuples RGB Cmyk Absolute Color SpaceDocumento20 pagineColor Space: Color Model Colors Tuples RGB Cmyk Absolute Color SpaceDinesh ScorpNessuna valutazione finora
- Ra2211003011631 MonishDocumento6 pagineRa2211003011631 MonishMonish VNessuna valutazione finora
- VPython Help17Documento1 paginaVPython Help17hammouNessuna valutazione finora
- Analysis of HSV Color Space For Image Retrieval: Rachita Sharma, Sanjay Kumar DubeyDocumento3 pagineAnalysis of HSV Color Space For Image Retrieval: Rachita Sharma, Sanjay Kumar DubeyIJERDNessuna valutazione finora
- Chapter 6 Color Image ProcessingDocumento34 pagineChapter 6 Color Image ProcessingGarvit TyagiNessuna valutazione finora
- Machine Vision Exp 2 (Mumbai Univesrity)Documento6 pagineMachine Vision Exp 2 (Mumbai Univesrity)Om BhamareNessuna valutazione finora
- Hsi - HSL - HSVDocumento27 pagineHsi - HSL - HSVspahicdaniloNessuna valutazione finora
- Unit04 BpelprocessesDocumento35 pagineUnit04 BpelprocessesnikwplayNessuna valutazione finora
- 3.0 State Space Representation of ProblemsDocumento18 pagine3.0 State Space Representation of ProblemsnikwplayNessuna valutazione finora
- CLOUD COMPUTING Comparison of Various FeaturesDocumento12 pagineCLOUD COMPUTING Comparison of Various FeaturesnikwplayNessuna valutazione finora
- Placement Papers Sample For IttiamDocumento2 paginePlacement Papers Sample For IttiamnikwplayNessuna valutazione finora
- Session Identification MechanismsDocumento8 pagineSession Identification MechanismsnikwplayNessuna valutazione finora
- Raspberry Pi Wireless AdapterDocumento3 pagineRaspberry Pi Wireless AdapternikwplayNessuna valutazione finora
- Master TheoremDocumento25 pagineMaster TheoremMoamen SaidNessuna valutazione finora
- A Star Search ExampleDocumento12 pagineA Star Search ExamplenikwplayNessuna valutazione finora
- Smart ShoppingDocumento7 pagineSmart ShoppingnikwplayNessuna valutazione finora
- A Database For Car Rental Software SystemDocumento61 pagineA Database For Car Rental Software Systemnikwplay67% (15)
- UML Diagrams For Digital DiaryDocumento5 pagineUML Diagrams For Digital Diarynikwplay100% (5)
- Summary of A Gentleman in Moscow: A Novel by Amor TowlesDa EverandSummary of A Gentleman in Moscow: A Novel by Amor TowlesValutazione: 3.5 su 5 stelle3.5/5 (7)
- An Appetite for Wonder: The Making of a ScientistDa EverandAn Appetite for Wonder: The Making of a ScientistNessuna valutazione finora
- Who Discovered America?: The Untold History of the Peopling of the AmericasDa EverandWho Discovered America?: The Untold History of the Peopling of the AmericasNessuna valutazione finora
- To Explain the World: The Discovery of Modern ScienceDa EverandTo Explain the World: The Discovery of Modern ScienceValutazione: 3.5 su 5 stelle3.5/5 (51)
- Witness: For the Prosecution of Scott PetersonDa EverandWitness: For the Prosecution of Scott PetersonValutazione: 3 su 5 stelle3/5 (44)
- The Boy, the Mole, the Fox and the HorseDa EverandThe Boy, the Mole, the Fox and the HorseValutazione: 4.5 su 5 stelle4.5/5 (1183)
- Summary: Lessons in Chemistry: A Novel by Bonnie Garmus: Key Takeaways, Summary & AnalysisDa EverandSummary: Lessons in Chemistry: A Novel by Bonnie Garmus: Key Takeaways, Summary & AnalysisValutazione: 3.5 su 5 stelle3.5/5 (8)
- The Magic of Reality: How We Know What's Really TrueDa EverandThe Magic of Reality: How We Know What's Really TrueValutazione: 4.5 su 5 stelle4.5/5 (107)
- Haruki Murakami Manga Stories 1: Super-Frog Saves Tokyo, The Seventh Man, Birthday Girl, Where I'm Likely to Find ItDa EverandHaruki Murakami Manga Stories 1: Super-Frog Saves Tokyo, The Seventh Man, Birthday Girl, Where I'm Likely to Find ItValutazione: 5 su 5 stelle5/5 (2)
- Lesbian Zombies From Outer Space: Issue 2Da EverandLesbian Zombies From Outer Space: Issue 2Valutazione: 2.5 su 5 stelle2.5/5 (11)
- Red Rising: Sons of Ares: Volume 2: Wrath [Dramatized Adaptation]Da EverandRed Rising: Sons of Ares: Volume 2: Wrath [Dramatized Adaptation]Valutazione: 4.5 su 5 stelle4.5/5 (21)
- Red Rising: Sons of Ares: Volume 1 [Dramatized Adaptation]Da EverandRed Rising: Sons of Ares: Volume 1 [Dramatized Adaptation]Valutazione: 4.5 su 5 stelle4.5/5 (38)
- Manga Yokai Stories: Ghostly Tales from Japan (Seven Manga Ghost Stories)Da EverandManga Yokai Stories: Ghostly Tales from Japan (Seven Manga Ghost Stories)Valutazione: 4.5 su 5 stelle4.5/5 (10)
- Lesbian Zombies From Outer Space: Issue 1Da EverandLesbian Zombies From Outer Space: Issue 1Valutazione: 2 su 5 stelle2/5 (15)