Potrebbero piacerti anche
- Aprendizaje en Profundidad PDFDocumento103 pagineAprendizaje en Profundidad PDFCarla Morales100% (1)
- Compartir 'Dell 2950.rtf'Documento9 pagineCompartir 'Dell 2950.rtf'Jonton Bagnado AlgalarrondoNessuna valutazione finora
- ALDA MARTIN MUNOZ TFM Final ALDA MARTIN 4286349 13984931Documento111 pagineALDA MARTIN MUNOZ TFM Final ALDA MARTIN 4286349 13984931Jonton Bagnado AlgalarrondoNessuna valutazione finora
- TFG Joaquin Perez MoralesDocumento144 pagineTFG Joaquin Perez MoralesJonton Bagnado AlgalarrondoNessuna valutazione finora
- Configuracion VLAN 2Documento8 pagineConfiguracion VLAN 2Jonton Bagnado AlgalarrondoNessuna valutazione finora
- Compartir 'Manual de Usuario - RTF'Documento3 pagineCompartir 'Manual de Usuario - RTF'Jonton Bagnado AlgalarrondoNessuna valutazione finora
- Prácticas Arduino 20 PDFDocumento58 paginePrácticas Arduino 20 PDFDavid Jonatán Pérez Hernández50% (2)
- Guia para Crear El Portafolio Del DocenteDocumento11 pagineGuia para Crear El Portafolio Del DocenteJonton Bagnado AlgalarrondoNessuna valutazione finora
- Librodeproyectosdearduinostarterkit 151212174250 PDFDocumento174 pagineLibrodeproyectosdearduinostarterkit 151212174250 PDFdbarrio2011Nessuna valutazione finora
- TECNIMAP 2000 Comunicacion 119Documento13 pagineTECNIMAP 2000 Comunicacion 119fgs22002Nessuna valutazione finora
- Proyecto Taller de Mantenimiento LLLDocumento2 pagineProyecto Taller de Mantenimiento LLLJonton Bagnado AlgalarrondoNessuna valutazione finora
- 10 Sistemas Moviles Celulares PDFDocumento51 pagine10 Sistemas Moviles Celulares PDFJohn Freddy Monroy JaimesNessuna valutazione finora
- Plantilla de AAP - 2020 v1Documento25 paginePlantilla de AAP - 2020 v1Jonton Bagnado AlgalarrondoNessuna valutazione finora
- Guia ProyectoDocumento26 pagineGuia ProyectoGustavoNessuna valutazione finora
- PracticoDocumento1 paginaPracticoJonton Bagnado AlgalarrondoNessuna valutazione finora
- Configuracion VLAN 3Documento6 pagineConfiguracion VLAN 3Jonton Bagnado AlgalarrondoNessuna valutazione finora
- Sensor Es Opti CosDocumento28 pagineSensor Es Opti CosYhorNessuna valutazione finora
- Modulo2 Capitulo3Documento25 pagineModulo2 Capitulo3Vivi VeraNessuna valutazione finora
- Enrutamiento EsticoDocumento6 pagineEnrutamiento EsticoJonton Bagnado AlgalarrondoNessuna valutazione finora
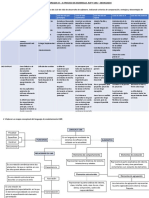
- Ruteo DinámicoDocumento38 pagineRuteo DinámicoJonton Bagnado AlgalarrondoNessuna valutazione finora
- Estudio de Caso Cetp - Sem1Documento3 pagineEstudio de Caso Cetp - Sem1Jonton Bagnado AlgalarrondoNessuna valutazione finora
- 1-Intro Gestion RedesDocumento23 pagine1-Intro Gestion RedesJonton Bagnado AlgalarrondoNessuna valutazione finora
- RUTEODocumento13 pagineRUTEOJonton Bagnado AlgalarrondoNessuna valutazione finora
- Configuracion VLAN 2Documento8 pagineConfiguracion VLAN 2Jonton Bagnado AlgalarrondoNessuna valutazione finora
- 74 Enrutamiento y Configuración de RedesDocumento93 pagine74 Enrutamiento y Configuración de RedesJonton Bagnado AlgalarrondoNessuna valutazione finora
- Clase 3 Comunicaciones MovilesDocumento28 pagineClase 3 Comunicaciones MovilesJonton Bagnado AlgalarrondoNessuna valutazione finora
- Redes de ComunicacionesDocumento47 pagineRedes de ComunicacionesjuanNessuna valutazione finora
- Clase Moviles 5Documento29 pagineClase Moviles 5Jonton Bagnado AlgalarrondoNessuna valutazione finora
- Como Funciona Un Circuito ElectricoDocumento32 pagineComo Funciona Un Circuito ElectricoÐaniel RojasNessuna valutazione finora
- Electronica Basica PDFDocumento74 pagineElectronica Basica PDFJohn Robert Muñoz ChavezNessuna valutazione finora
- Documentación Herramientas o Recursos para La Administracion de Base de DatosDocumento3 pagineDocumentación Herramientas o Recursos para La Administracion de Base de DatosJohan CarlosNessuna valutazione finora
- Manual Corporativa VidrieraDocumento20 pagineManual Corporativa VidrieraJosé JuárezNessuna valutazione finora
- Tarea Encargada 03Documento5 pagineTarea Encargada 03Junior ArzuagaNessuna valutazione finora
- Josep CardenasDocumento10 pagineJosep Cardenasjoseline gonzalezNessuna valutazione finora
- 30 SL Tjcliri 15633Documento1 pagina30 SL Tjcliri 15633Bilgai PerezNessuna valutazione finora
- HM6116Documento4 pagineHM6116Samuel CanasaNessuna valutazione finora
- 03 Plano de SeñalizacionDocumento1 pagina03 Plano de SeñalizacionRafael HiaynasiNessuna valutazione finora
- Acta de Asignacion de Recurso para El SG-SSTDocumento2 pagineActa de Asignacion de Recurso para El SG-SSTMauricio BaenaNessuna valutazione finora
- Apuntes Tema 2 Compaginaciã NDocumento48 pagineApuntes Tema 2 Compaginaciã NNieves OliverNessuna valutazione finora
- Flujograma DefinicionDocumento4 pagineFlujograma DefinicionAna Sofia50% (2)
- Paso A Paso Asignación y Finalización de Roles 2Documento21 paginePaso A Paso Asignación y Finalización de Roles 2Leydy Johana Vargas SolerNessuna valutazione finora
- Worldtron Cotizacion CCTV Puerto GuzmanDocumento9 pagineWorldtron Cotizacion CCTV Puerto GuzmanPC Arlexis JhonNessuna valutazione finora
- Guía Xilinx para Contador.Documento34 pagineGuía Xilinx para Contador.Thais M. Batista V.Nessuna valutazione finora
- Otros Casos Practicos Admin Prod 2Documento10 pagineOtros Casos Practicos Admin Prod 2Rojas Guevara FrancoNessuna valutazione finora
- Manual Himoinsa Cem7 Control Advanced PDFDocumento105 pagineManual Himoinsa Cem7 Control Advanced PDFMartin Vera Flores100% (1)
- SCM - DPA-Semana 4-5 ALMACENES PDFDocumento37 pagineSCM - DPA-Semana 4-5 ALMACENES PDFRenzo AlemanNessuna valutazione finora
- Configuracion Prosoft ILX56Documento13 pagineConfiguracion Prosoft ILX56pfuenteszNessuna valutazione finora
- Practica #-La RuedaDocumento13 paginePractica #-La RuedaLaura Hernandez AceroNessuna valutazione finora
- TGS 2022 2 PC2 2022 Ii - UsmpDocumento10 pagineTGS 2022 2 PC2 2022 Ii - UsmpArroz con PolloNessuna valutazione finora
- CV N Cabana CH 2016Documento21 pagineCV N Cabana CH 2016Crystal WoodwardNessuna valutazione finora
- Plan de TrabajoDocumento11 paginePlan de TrabajoVania ElizabethNessuna valutazione finora
- Prueba Tipo 4Documento2 paginePrueba Tipo 4Michelle TorresNessuna valutazione finora
- Manual All Test IV Pro & Emcat Pro 2005Documento43 pagineManual All Test IV Pro & Emcat Pro 2005Cristian Stuardo GaticaNessuna valutazione finora
- Termino de Privacidad 15324570Documento2 pagineTermino de Privacidad 15324570libelula BlueNessuna valutazione finora
- Diapositiva AnalisisDocumento23 pagineDiapositiva AnalisisJuniorNessuna valutazione finora
- Diagramas EnfoqueDocumento6 pagineDiagramas EnfoqueEleazar MarinNessuna valutazione finora
- SonorDocumento8 pagineSonorOscar BgNessuna valutazione finora
- Grupo #5 INFORME (Exposición) COMPONENTES DE HARDWAREDocumento18 pagineGrupo #5 INFORME (Exposición) COMPONENTES DE HARDWARELeonel Puerto OliveraNessuna valutazione finora
- EJERCICIOS MAQUINA TURING 2 SolucionDocumento7 pagineEJERCICIOS MAQUINA TURING 2 SolucionAntony Sharif Prieto SierraNessuna valutazione finora
- Proyecto Interdiciplinario Matematica 2P QQ1Documento2 pagineProyecto Interdiciplinario Matematica 2P QQ1David OCNessuna valutazione finora