Potrebbero piacerti anche
- Case Study Computing The Forward Kinematics of 6DOF Robotic ArmDocumento7 pagineCase Study Computing The Forward Kinematics of 6DOF Robotic ArmĐỗ ThànhNessuna valutazione finora
- Case Study Computing The Forward Kinematics of 6DOF Robotic ArmDocumento7 pagineCase Study Computing The Forward Kinematics of 6DOF Robotic ArmĐỗ ThànhNessuna valutazione finora
- Course Material (Students)Documento46 pagineCourse Material (Students)Lamjed AouaniNessuna valutazione finora
- Inverse Kinematics For A Humanoid Robot: A Mix Between Closed Form and Geometric SolutionsDocumento32 pagineInverse Kinematics For A Humanoid Robot: A Mix Between Closed Form and Geometric SolutionsUrielNessuna valutazione finora
- Lec28 Denavit Hartenberg HandoutDocumento3 pagineLec28 Denavit Hartenberg Handoutsuraj7045sarmanNessuna valutazione finora
- Model, Motion Planning and Control of UR10: Universit e de Montpellier - LIRMMDocumento15 pagineModel, Motion Planning and Control of UR10: Universit e de Montpellier - LIRMMZakaria Elhabib BOUZITNessuna valutazione finora
- Design Harmo Robot (English Ver.)Documento40 pagineDesign Harmo Robot (English Ver.)Hiếu DươngNessuna valutazione finora
- ME427 LEC11 Forward KinameticsDocumento15 pagineME427 LEC11 Forward KinameticsSohaib IrfanNessuna valutazione finora
- Lec4 Forward KinematicsDocumento21 pagineLec4 Forward KinematicsbalkyderNessuna valutazione finora
- Minggu 2 Dan 3 - Stability PDFDocumento43 pagineMinggu 2 Dan 3 - Stability PDFFahmi RizalNessuna valutazione finora
- Workspace Analysis and Dynamics Simulation of Manipulator Based On MatlabDocumento9 pagineWorkspace Analysis and Dynamics Simulation of Manipulator Based On Matlab肯尼Nessuna valutazione finora
- Động lực học và điều khiển robot: Robot manipulator and controlDocumento27 pagineĐộng lực học và điều khiển robot: Robot manipulator and controlTu My LamNessuna valutazione finora
- Robotics (17ME2504A) Unit IV Manipulator KinematicsDocumento32 pagineRobotics (17ME2504A) Unit IV Manipulator KinematicsNani PusuluriNessuna valutazione finora
- Tutorial2 PDFDocumento10 pagineTutorial2 PDFMihai NicolaeNessuna valutazione finora
- Ijmet 08 02 002 PDFDocumento8 pagineIjmet 08 02 002 PDFalokNessuna valutazione finora
- ST8 MM2 View2Documento5 pagineST8 MM2 View2wvairoNessuna valutazione finora
- Docs Gate User GuideDocumento2 pagineDocs Gate User GuideJinu AugustineNessuna valutazione finora
- Finite Automata and Arithmetic: J.-P. AlloucheDocumento23 pagineFinite Automata and Arithmetic: J.-P. AlloucheIsyania FarahaniNessuna valutazione finora
- Kinematics Part 3Documento22 pagineKinematics Part 3fatinNessuna valutazione finora
- Forward Kinematics: "Finding The End Effector Given The Joint Angles"Documento18 pagineForward Kinematics: "Finding The End Effector Given The Joint Angles"Saleem HaddadNessuna valutazione finora
- Mid Sem Papaer - RoboticsDocumento2 pagineMid Sem Papaer - RoboticsshubhamNessuna valutazione finora
- (MATH2111) (2013) (F) Midterm tvmq3t 59229Documento7 pagine(MATH2111) (2013) (F) Midterm tvmq3t 59229Bobo Lai Po HeiNessuna valutazione finora
- Chapter4 Associative MemoryDocumento27 pagineChapter4 Associative MemoryBhavnesh FirkeNessuna valutazione finora
- Robotics1 11.07.04Documento6 pagineRobotics1 11.07.04asalifew belachewNessuna valutazione finora
- BioMEMS Sheet2 ADocumento7 pagineBioMEMS Sheet2 Atracywst0123Nessuna valutazione finora
- 2009-01hw2 Ans PDFDocumento8 pagine2009-01hw2 Ans PDFnely coniNessuna valutazione finora
- Robotics Cheat SheetDocumento2 pagineRobotics Cheat SheetHaoNessuna valutazione finora
- Experimental Verification of Kinematic Model of Scorbot Er-4U Robot ManipulatorDocumento12 pagineExperimental Verification of Kinematic Model of Scorbot Er-4U Robot ManipulatorTJPRC PublicationsNessuna valutazione finora
- Camera Ready - AM-16Documento6 pagineCamera Ready - AM-16jaya sahaNessuna valutazione finora
- Ch. 3: Forward and Inverse Kinematics: KON 318E: Introduction To Robotics 1Documento79 pagineCh. 3: Forward and Inverse Kinematics: KON 318E: Introduction To Robotics 1Dursun DurmasınNessuna valutazione finora
- Kinematic Modeling and Verification For A SCARA Robot: Chenhuan Feng, Guanbin Gao, Yongli CaoDocumento4 pagineKinematic Modeling and Verification For A SCARA Robot: Chenhuan Feng, Guanbin Gao, Yongli Caoसन्तोस दाहालNessuna valutazione finora
- Finite Element Modelling of Unbounded Post-Tensioned TendonsDocumento8 pagineFinite Element Modelling of Unbounded Post-Tensioned TendonsPPPNessuna valutazione finora
- Adobe Scan 17-Feb-2024Documento6 pagineAdobe Scan 17-Feb-2024adityajhanwar24Nessuna valutazione finora
- 4 - Representations - Chemistry LibreTextsDocumento4 pagine4 - Representations - Chemistry LibreTextsasadNessuna valutazione finora
- Rotation Matrices and QuaternionsDocumento11 pagineRotation Matrices and QuaternionsAleksa TrifkovićNessuna valutazione finora
- Coordinate Frames and TransformsDocumento8 pagineCoordinate Frames and TransformsBhai BhaiNessuna valutazione finora
- Thesis Report - Date: April 5th 2018 Forward and Inverse Kinematics of 3 Revolution-Joint Robotic ArmDocumento7 pagineThesis Report - Date: April 5th 2018 Forward and Inverse Kinematics of 3 Revolution-Joint Robotic ArmVienNgocQuangNessuna valutazione finora
- Linear Algebra Tutorial Sheets 1Documento11 pagineLinear Algebra Tutorial Sheets 1Vidushi VinodNessuna valutazione finora
- Solutions Manual For Mechanics and ThermodynamicsDocumento112 pagineSolutions Manual For Mechanics and ThermodynamicsPaduraru Giani83% (24)
- DH RulesDocumento69 pagineDH RulesHoney RathoreNessuna valutazione finora
- Product Modelling For Product Development: Frédéric NoëlDocumento18 pagineProduct Modelling For Product Development: Frédéric NoëldaudinNessuna valutazione finora
- Industrial Robot PrepareDocumento8 pagineIndustrial Robot PrepareCao KhảiNessuna valutazione finora
- Goldstein Solution Ch-7Documento10 pagineGoldstein Solution Ch-7shaukatkhattak67% (3)
- HitunganDocumento176 pagineHitunganShandy Trisakti PaidingNessuna valutazione finora
- Forward KinematicsDocumento4 pagineForward KinematicsZafer Gök100% (1)
- Assignment 7 - IsomorphismDocumento13 pagineAssignment 7 - IsomorphismVikram Ramesh (VIKKY)Nessuna valutazione finora
- Linear Block Codes: Lecture Notes by Y. N. TrivediDocumento12 pagineLinear Block Codes: Lecture Notes by Y. N. Trivedimeet261998Nessuna valutazione finora
- Productivity Now: Social Administration, Training, Economics and Production DivisionDa EverandProductivity Now: Social Administration, Training, Economics and Production DivisionNessuna valutazione finora
- Solution Manual for The Elements of Polymer Science and EngineeringDa EverandSolution Manual for The Elements of Polymer Science and EngineeringValutazione: 4 su 5 stelle4/5 (3)
- Inverse Trigonometric Functions (Trigonometry) Mathematics Question BankDa EverandInverse Trigonometric Functions (Trigonometry) Mathematics Question BankNessuna valutazione finora
- De Moiver's Theorem (Trigonometry) Mathematics Question BankDa EverandDe Moiver's Theorem (Trigonometry) Mathematics Question BankNessuna valutazione finora
- Robot Manipulators: Modeling, Performance Analysis and ControlDa EverandRobot Manipulators: Modeling, Performance Analysis and ControlNessuna valutazione finora
- Transformation of Axes (Geometry) Mathematics Question BankDa EverandTransformation of Axes (Geometry) Mathematics Question BankValutazione: 3 su 5 stelle3/5 (1)
- Constructed Layered Systems: Measurements and AnalysisDa EverandConstructed Layered Systems: Measurements and AnalysisNessuna valutazione finora
- Graphs and Tables of the Mathieu Functions and Their First DerivativesDa EverandGraphs and Tables of the Mathieu Functions and Their First DerivativesNessuna valutazione finora
- 6servo Robot Arm EngDocumento18 pagine6servo Robot Arm EngĐỗ ThànhNessuna valutazione finora
- 6servo Robot Arm Eng PDFDocumento18 pagine6servo Robot Arm Eng PDFĐỗ ThànhNessuna valutazione finora
- XungDocumento8 pagineXungĐỗ ThànhNessuna valutazione finora
- 6servo Robot Arm EngDocumento18 pagine6servo Robot Arm EngĐỗ ThànhNessuna valutazione finora
- 2005 AMC 12B ProblemsDocumento3 pagine2005 AMC 12B ProblemsjabagaweeNessuna valutazione finora
- Cayley Contest: Canadian Mathematics CompetitionDocumento6 pagineCayley Contest: Canadian Mathematics CompetitioneilycNessuna valutazione finora
- Hyperbolic Function - WikipediaDocumento11 pagineHyperbolic Function - WikipediaMadhav SethiaNessuna valutazione finora
- Machine Drawing UME 303: Credit 3 - 1L-2T-2TDocumento25 pagineMachine Drawing UME 303: Credit 3 - 1L-2T-2TShubham KaushikNessuna valutazione finora
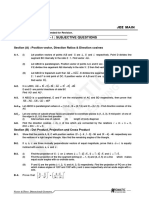
- Vector and 3-D Geometry Jee AdvDocumento41 pagineVector and 3-D Geometry Jee AdvAlhamd RahmanNessuna valutazione finora
- Problem Set - 02: (Dirac Delta Function, Jacobian, Fourier and Laplace Transformation)Documento1 paginaProblem Set - 02: (Dirac Delta Function, Jacobian, Fourier and Laplace Transformation)ashis sahaNessuna valutazione finora
- FA1 Athematics SetA QPDocumento2 pagineFA1 Athematics SetA QPbal_thakreNessuna valutazione finora
- Direction TestDocumento4 pagineDirection TestShraddha sonarNessuna valutazione finora
- Name SidesDocumento2 pagineName SidesPaulNessuna valutazione finora
- Mathematics January 2018 P2Documento40 pagineMathematics January 2018 P2Mr. NigglesNessuna valutazione finora
- Cbse 12th Term 2 Mathematics Question Paper 2022Documento3 pagineCbse 12th Term 2 Mathematics Question Paper 2022JayNessuna valutazione finora
- Group 3 Elec Tricks 1CpE B COE105 Group Activity TorqueDocumento8 pagineGroup 3 Elec Tricks 1CpE B COE105 Group Activity TorqueCadang, John Lloyd M.Nessuna valutazione finora
- Electromagnetics Assignment Ee /ec: 1.vector Calculas, Coordinate SystemsDocumento6 pagineElectromagnetics Assignment Ee /ec: 1.vector Calculas, Coordinate SystemsShubham GoyalNessuna valutazione finora
- 3rd ChapterDocumento10 pagine3rd ChapterDeepak BhaskaranNessuna valutazione finora
- 2020 1학기 (과제2) PDFDocumento4 pagine2020 1학기 (과제2) PDFHyunSung KimNessuna valutazione finora
- 5th Maths P2Documento64 pagine5th Maths P2Saurabh RajNessuna valutazione finora
- Geometry - 081811 - 1 2 Linear Measure and PrecisionDocumento17 pagineGeometry - 081811 - 1 2 Linear Measure and Precisionapi-252752147Nessuna valutazione finora
- AcetateDocumento5 pagineAcetateCLark RomeroNessuna valutazione finora
- Geometry On A Monge Patch: - by Benny Van Zuiden - 15 - February - 2012Documento10 pagineGeometry On A Monge Patch: - by Benny Van Zuiden - 15 - February - 2012ascaniobaNessuna valutazione finora
- MECH 1301 Statics: Equilibrium of A ParticleDocumento20 pagineMECH 1301 Statics: Equilibrium of A ParticleLabibz HasanNessuna valutazione finora
- Exercise 14 SolutionsDocumento42 pagineExercise 14 SolutionsLancePacioNessuna valutazione finora
- Engineering Drawing Unit - IDocumento189 pagineEngineering Drawing Unit - IK S Chalapathi100% (1)
- Bernitsas M.A Three-Dimensional .Mar.1982.JSR PDFDocumento6 pagineBernitsas M.A Three-Dimensional .Mar.1982.JSR PDFdanilo laraNessuna valutazione finora
- MTH-641 Merged Handouts (1-113 Topics)Documento141 pagineMTH-641 Merged Handouts (1-113 Topics)shining star100% (1)
- Mathematics Practice Problems Vol 1 PDFDocumento2.914 pagineMathematics Practice Problems Vol 1 PDFteacherheinkoNessuna valutazione finora
- Frustum of A ConeDocumento11 pagineFrustum of A Coneayushi_n72Nessuna valutazione finora
- Curvature and Radius of CurvatureDocumento8 pagineCurvature and Radius of CurvatureRMolina65Nessuna valutazione finora
- 2019-C3D Modeler Start 01 FoundationsDocumento32 pagine2019-C3D Modeler Start 01 FoundationsfcoppoleNessuna valutazione finora
- CS 726: Nonlinear Optimization 1 Lecture 2: Background MaterialDocumento14 pagineCS 726: Nonlinear Optimization 1 Lecture 2: Background MaterialHarrisNessuna valutazione finora
- M.SC Math PDFDocumento42 pagineM.SC Math PDFgollakotiNessuna valutazione finora