Potrebbero piacerti anche
- CH2-1 Modeling PDFDocumento55 pagineCH2-1 Modeling PDFyapacagınız sıteyı s..Nessuna valutazione finora
- CH2-3 TFandBlockDiag PDFDocumento51 pagineCH2-3 TFandBlockDiag PDFyapacagınız sıteyı s..Nessuna valutazione finora
- Control Systems Control Systems Control Systems Control SystemsDocumento44 pagineControl Systems Control Systems Control Systems Control Systemsyapacagınız sıteyı s..Nessuna valutazione finora
- Fluidos Cap4Documento50 pagineFluidos Cap4SebastianKornejoNessuna valutazione finora
- Embedded Model Predictive Control For An ESP On A PLCDocumento7 pagineEmbedded Model Predictive Control For An ESP On A PLCRhaclley AraújoNessuna valutazione finora
- 002general Energy Analysis of THERMODYNAMICSDocumento30 pagine002general Energy Analysis of THERMODYNAMICSm7sen mohammedNessuna valutazione finora
- WEEK 6 MODULE 6 - Multivariable Control - NEWDocumento106 pagineWEEK 6 MODULE 6 - Multivariable Control - NEWmutencoNessuna valutazione finora
- Topic 5 Transfer Function Approach To Modeling Dynamic SystemsDocumento49 pagineTopic 5 Transfer Function Approach To Modeling Dynamic Systemswenfang lee0% (1)
- CS Lecture Notes Units 1 2 3Documento88 pagineCS Lecture Notes Units 1 2 3sushinkNessuna valutazione finora
- Mat Lab PresentationDocumento6 pagineMat Lab PresentationShivamNessuna valutazione finora
- CHE3162 2015 Exam Paper SOLUTIONS v2 MoodleDocumento21 pagineCHE3162 2015 Exam Paper SOLUTIONS v2 MoodleMashroof AhmedNessuna valutazione finora
- Lect 9 Overall Transfer Function of A Closed-Loop Control SystemDocumento8 pagineLect 9 Overall Transfer Function of A Closed-Loop Control SystemZaidoon MohsinNessuna valutazione finora
- Process Control QuestionsDocumento3 pagineProcess Control QuestionsAsaybe BofahNessuna valutazione finora
- THERMO1 Formula SheetDocumento7 pagineTHERMO1 Formula SheetNyahaha HahahNessuna valutazione finora
- rr320803 Process Dynamics and ControlDocumento6 paginerr320803 Process Dynamics and ControlSRINIVASA RAO GANTANessuna valutazione finora
- Experiment No.03: Mathematical Modeling of Physical System: ObjectiveDocumento5 pagineExperiment No.03: Mathematical Modeling of Physical System: ObjectiveSao SavathNessuna valutazione finora
- Bettering Operation of Robots by Learning, Arimoto Et AlDocumento18 pagineBettering Operation of Robots by Learning, Arimoto Et AlPeps Peps PepsNessuna valutazione finora
- Process Dynamics and Control, Ch. 24 Solution ManualDocumento27 pagineProcess Dynamics and Control, Ch. 24 Solution ManualBen Spearman100% (1)
- MatlabDocumento6 pagineMatlabDaniel García100% (1)
- Manual Experimento Orifícios (GUNT) PDFDocumento9 pagineManual Experimento Orifícios (GUNT) PDFJosué OliveiraNessuna valutazione finora
- Chem Termo ModDocumento21 pagineChem Termo ModAda TopanNessuna valutazione finora
- Low Dimensional Manifold in Dissipative Dynamical SystemsDocumento74 pagineLow Dimensional Manifold in Dissipative Dynamical SystemsAnees Ur Rehman100% (1)
- Practical Plantwide Process Control: PID Tuning: Sigurd Skogestad, NTNUDocumento66 paginePractical Plantwide Process Control: PID Tuning: Sigurd Skogestad, NTNUtahermohNessuna valutazione finora
- PsoDocumento17 paginePsoKanishka SahniNessuna valutazione finora
- Updated Chapter 2 Control Systems Lecture NotesDocumento22 pagineUpdated Chapter 2 Control Systems Lecture Notesvijay rajNessuna valutazione finora
- Stability Analysis of Nonlinear Systems Using Lyapunov Theory - IDocumento28 pagineStability Analysis of Nonlinear Systems Using Lyapunov Theory - IGurpreet KaurNessuna valutazione finora
- Plate TheoryDocumento27 paginePlate TheoryDedex PutraNessuna valutazione finora
- Multivariable Control SystemDocumento39 pagineMultivariable Control SystemAmeerRashidNessuna valutazione finora
- Control Por Computador: December 10, 2013Documento41 pagineControl Por Computador: December 10, 2013turbodilanNessuna valutazione finora
- Anna University B.Tech Chemical Engineering SyllabusDocumento4 pagineAnna University B.Tech Chemical Engineering SyllabusSanthaseelan CNessuna valutazione finora
- LQRDocumento14 pagineLQRStefania Oliveira100% (1)
- Ball & Beam DocumentDocumento14 pagineBall & Beam DocumentJorge PorrasNessuna valutazione finora
- First Order SystemDocumento21 pagineFirst Order SystemNiranjan BeheraNessuna valutazione finora
- Enhanced Single-Loop Control StrategiesDocumento26 pagineEnhanced Single-Loop Control Strategiesmeseret sisay100% (1)
- Flow Control Trainer (GUNT)Documento3 pagineFlow Control Trainer (GUNT)Harry HutamaNessuna valutazione finora
- Mathematical Model of SOFC (Solid Oxide Fuel Cell) For Power Plant SimulationsDocumento7 pagineMathematical Model of SOFC (Solid Oxide Fuel Cell) For Power Plant SimulationsErwin Zavalla OchoaNessuna valutazione finora
- (Ebook) Multivariable Control, An Introduction PDFDocumento14 pagine(Ebook) Multivariable Control, An Introduction PDFCaterine Feria RamirezNessuna valutazione finora
- Cheat Sheet Modelling 1718Documento2 pagineCheat Sheet Modelling 1718Siti MaisarahNessuna valutazione finora
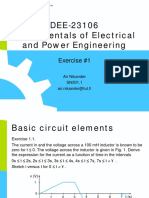
- DEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1Documento12 pagineDEE-23106 Fundamentals of Electrical and Power Engineering: Exercise #1shoptodipNessuna valutazione finora
- Phase DiagramDocumento46 paginePhase Diagramali razaNessuna valutazione finora
- Block Diagram AlgebraDocumento16 pagineBlock Diagram AlgebraMirwana AirlinesNessuna valutazione finora
- B K Dutta Mass Transfer PDFDocumento2 pagineB K Dutta Mass Transfer PDFFvffghgNessuna valutazione finora
- Chapter 3 Cre MCQDocumento10 pagineChapter 3 Cre MCQRohit Ramesh KaleNessuna valutazione finora
- ME302 Heat and Mass TransferDocumento3 pagineME302 Heat and Mass TransferRagesh DuduNessuna valutazione finora
- Handout2 Kinematics 1Documento11 pagineHandout2 Kinematics 1Gipsa JosephNessuna valutazione finora
- Assignment 06: CP 518: Polymer Science & EngineeringDocumento2 pagineAssignment 06: CP 518: Polymer Science & EngineeringAD D100% (1)
- Systems and Control PDFDocumento9 pagineSystems and Control PDFHamid Farhan0% (1)
- Diagram FasaDocumento6 pagineDiagram Fasaolid_zoneNessuna valutazione finora
- Fluid Statics and MechanicsDocumento181 pagineFluid Statics and MechanicsKarl Vincent LaoNessuna valutazione finora
- UNIFAC - Properties of Gases and LiquidsDocumento37 pagineUNIFAC - Properties of Gases and LiquidsAngelicCamarisPereaNessuna valutazione finora
- BIOM9027Documento12 pagineBIOM9027Kajaruban SurendranNessuna valutazione finora
- Root Locus and Closed Loop Transfer Function CalculationDocumento8 pagineRoot Locus and Closed Loop Transfer Function CalculationAkashNessuna valutazione finora
- Process Dynamics and ControlDocumento7 pagineProcess Dynamics and ControlTitilope Oreoluwa MorolariNessuna valutazione finora
- MCQ WorsDocumento8 pagineMCQ Worssuhasg027100% (1)
- Control Systems Control Systems: ME 304 ME 304Documento41 pagineControl Systems Control Systems: ME 304 ME 304yapacagınız sıteyı s..Nessuna valutazione finora
- Control Systems Control Systems Control Systems Control SystemsDocumento59 pagineControl Systems Control Systems Control Systems Control Systemsyadav poonamNessuna valutazione finora
- Dynamic Analysis Guide PDFDocumento14 pagineDynamic Analysis Guide PDFABDULLAHNessuna valutazione finora
- Dynamic Analysis GuideDocumento14 pagineDynamic Analysis GuideMULAGONDLA DINESH REDDYNessuna valutazione finora
- Dynamic Analysis Guide PDFDocumento14 pagineDynamic Analysis Guide PDFVijay PNessuna valutazione finora
- Control Systems Engineering: January 2010Documento22 pagineControl Systems Engineering: January 2010Kanugolu Bala Ananth SaiNessuna valutazione finora
- 1-2 Introduction To Controlll PDFDocumento10 pagine1-2 Introduction To Controlll PDFyapacagınız sıteyı s..Nessuna valutazione finora
- 5 Root Locus DesignnnDocumento5 pagine5 Root Locus Designnnyapacagınız sıteyı s..Nessuna valutazione finora
- 1-2 Introduction To Control PDFDocumento10 pagine1-2 Introduction To Control PDFyapacagınız sıteyı s..100% (1)
- Control Systems Control Systems: ME 304 ME 304Documento41 pagineControl Systems Control Systems: ME 304 ME 304yapacagınız sıteyı s..Nessuna valutazione finora
- CH2-2 Modeling PDFDocumento47 pagineCH2-2 Modeling PDFyapacagınız sıteyı s..Nessuna valutazione finora
- Conectar A BD en SeleniumDocumento4 pagineConectar A BD en SeleniumCristhian Andrés GonzálezNessuna valutazione finora
- Fmaths 3RD Term YR11 PlanDocumento28 pagineFmaths 3RD Term YR11 Planadegunloye temitopeNessuna valutazione finora
- Transportation ModelDocumento20 pagineTransportation ModelRaj UpadhyayNessuna valutazione finora
- Design and Simulation of A QCA 2 To 1 MultiplexerDocumento5 pagineDesign and Simulation of A QCA 2 To 1 MultiplexerzubifayazNessuna valutazione finora
- Microstructure and Mechanical Properties of Borated Stainless Steel (304B) GTA and SMA WeldsDocumento6 pagineMicrostructure and Mechanical Properties of Borated Stainless Steel (304B) GTA and SMA WeldsReza nugrahaNessuna valutazione finora
- PHP Question AnswerDocumento20 paginePHP Question AnswerManish SharmaNessuna valutazione finora
- Chapter 1 AssignmentDocumento4 pagineChapter 1 Assignmenthamster808100% (3)
- Service Manual: Fully Automatic Washing MachineDocumento41 pagineService Manual: Fully Automatic Washing MachineSơn PhạmNessuna valutazione finora
- Delamination With AbaqusDocumento13 pagineDelamination With AbaqusSchmetterling TraurigNessuna valutazione finora
- Paracetamol Overdose: BW 40 KG Without Fluid RestrictionDocumento2 pagineParacetamol Overdose: BW 40 KG Without Fluid RestrictionAndy TanNessuna valutazione finora
- Yuzuru Hanyu - ThesisDocumento6 pagineYuzuru Hanyu - ThesisFatima Esperanza Ortiz Ortiz100% (4)
- Product Perspective: XP Button, LV Button and VK FrameDocumento54 pagineProduct Perspective: XP Button, LV Button and VK FrameGokul krishnanNessuna valutazione finora
- St. Xavier'S School, Burdwan: o o o oDocumento2 pagineSt. Xavier'S School, Burdwan: o o o obidyut naskarNessuna valutazione finora
- DRK109A&B Touch-Screen Bursting Strength TesterDocumento2 pagineDRK109A&B Touch-Screen Bursting Strength Testermohamadreza1368Nessuna valutazione finora
- 125 Tractor: (Specifications and Design Subject To Change Without Notice)Documento5 pagine125 Tractor: (Specifications and Design Subject To Change Without Notice)Gary LarsonNessuna valutazione finora
- Final Defence 2078Documento43 pagineFinal Defence 2078XxxNessuna valutazione finora
- The Network+ Cram Sheet: Networking ConceptsDocumento4 pagineThe Network+ Cram Sheet: Networking ConceptsISTAKHAR UDDIN AHAMED100% (1)
- Isentropic ExponentDocumento2 pagineIsentropic ExponentAlf OtherspaceNessuna valutazione finora
- Scopus Crystal NeedleDocumento256 pagineScopus Crystal NeedleDr. Ramchandra Gosavi PatilNessuna valutazione finora
- About The MS Regression ModelsDocumento17 pagineAbout The MS Regression ModelsLars LarsonNessuna valutazione finora
- Mv324 Data SheetDocumento17 pagineMv324 Data SheetGianmarco CastilloNessuna valutazione finora
- Quick Start Guide For Driver Compilation and InstallationDocumento6 pagineQuick Start Guide For Driver Compilation and InstallationvijayNessuna valutazione finora
- STR ReportDocumento30 pagineSTR ReportrahulNessuna valutazione finora
- OSHA Module 3Documento17 pagineOSHA Module 3Varsha GNessuna valutazione finora
- Seam Strength of Corrugated Plate With High Strength SteelDocumento15 pagineSeam Strength of Corrugated Plate With High Strength SteelMariano SalcedoNessuna valutazione finora
- The ParagraphDocumento4 pagineThe Paragraphapi-238710927Nessuna valutazione finora
- PointersDocumento29 paginePointersHindhupriyaNessuna valutazione finora
- Degree of Kinematic IndeterminacyDocumento8 pagineDegree of Kinematic IndeterminacyshahrukhNessuna valutazione finora
- Transom Analysis ComparisonDocumento38 pagineTransom Analysis ComparisonRifky NetriadyNessuna valutazione finora
- 1.bitwise OperatorsDocumento2 pagine1.bitwise OperatorsPaul kollamNessuna valutazione finora