Potrebbero piacerti anche
- Super Sel e - G (Iai 038C - V7) eDocumento266 pagineSuper Sel e - G (Iai 038C - V7) eEudel TeyNessuna valutazione finora
- Installation and Users Guide MI 8 Interface UnitDocumento18 pagineInstallation and Users Guide MI 8 Interface Unitleon100% (1)
- TURBO-Buick V6 Turbo Intro 780413Documento21 pagineTURBO-Buick V6 Turbo Intro 780413T Smi100% (1)
- MP12 Probe System Installation and User's GuideDocumento146 pagineMP12 Probe System Installation and User's GuideleonNessuna valutazione finora
- CNC Chip ConveyorDocumento10 pagineCNC Chip Conveyorjocimar100% (1)
- Hydro TechnikDocumento80 pagineHydro TechnikleonNessuna valutazione finora
- Baja Suspension ReportDocumento3 pagineBaja Suspension ReportheroNessuna valutazione finora
- Perfect Charging Solar EnergyDocumento8 paginePerfect Charging Solar Energyseham qafesheh100% (1)
- BEIJER - CIMREX StartupDocumento182 pagineBEIJER - CIMREX StartupJorge_Andril_5370Nessuna valutazione finora
- Camworks Manual Based On Vtu SyllabusDocumento25 pagineCamworks Manual Based On Vtu Syllabusviper7887Nessuna valutazione finora
- MachineShop Getting Started Guide PDFDocumento97 pagineMachineShop Getting Started Guide PDF128sAc100% (1)
- Machinist'S Reference GuideDocumento52 pagineMachinist'S Reference Guidedelta toNessuna valutazione finora
- ELECNC-6090 QuotationDocumento10 pagineELECNC-6090 QuotationKarol VilcaNessuna valutazione finora
- Limited Slip Differential: Identification and Application ChartDocumento16 pagineLimited Slip Differential: Identification and Application ChartManuel SterlingNessuna valutazione finora
- Design and Development of A Dry Sump Lubrication System For A Formula SAE Race CarDocumento9 pagineDesign and Development of A Dry Sump Lubrication System For A Formula SAE Race CarSunnyNessuna valutazione finora
- VMC 4020Documento11 pagineVMC 4020Arul SakthiNessuna valutazione finora
- Design of The SR20Documento11 pagineDesign of The SR20hugostvNessuna valutazione finora
- Catalog - Actassi - Part2 (En)Documento87 pagineCatalog - Actassi - Part2 (En)Anonymous FTBYfqkNessuna valutazione finora
- M & G Code Sample FileDocumento9 pagineM & G Code Sample Fileandhab1Nessuna valutazione finora
- Tuning Manual Tuning Manual Tuning Manual Tuning ManualDocumento62 pagineTuning Manual Tuning Manual Tuning Manual Tuning ManualDavid BaylissNessuna valutazione finora
- Design of Double Wishbone Suspension System of BAJA VehicleDocumento8 pagineDesign of Double Wishbone Suspension System of BAJA VehicleSai Krishna SKNessuna valutazione finora
- Thunderbolt Ac DCDocumento44 pagineThunderbolt Ac DCmarcos crNessuna valutazione finora
- Taiwan DELTA VFD B - Manual - enDocumento239 pagineTaiwan DELTA VFD B - Manual - enfayselaNessuna valutazione finora
- Tao Motor Bull 150 Owner S Manual 8-2-19Documento80 pagineTao Motor Bull 150 Owner S Manual 8-2-19Jesus Abel LopezNessuna valutazione finora
- Centroid VCP Users ManualDocumento53 pagineCentroid VCP Users ManualIfa_BosheNessuna valutazione finora
- Manual Guide Milling and Turning Manual PDFDocumento978 pagineManual Guide Milling and Turning Manual PDFkalede2100% (1)
- Turbo Tech 102 - Advanced: Understanding Air FlowDocumento10 pagineTurbo Tech 102 - Advanced: Understanding Air FlowrodrigoracingNessuna valutazione finora
- 0710 GearSolutions PDFDocumento68 pagine0710 GearSolutions PDFHEMANTKHERANessuna valutazione finora
- Technical Information on Speed Charts and Insert MaterialsDocumento32 pagineTechnical Information on Speed Charts and Insert MaterialssathishelakkiyaNessuna valutazione finora
- PSR-TRISAFE-M Manual PDFDocumento126 paginePSR-TRISAFE-M Manual PDFwiruNessuna valutazione finora
- Freescale Signal Processing Extension 2 ISA Reference ManualDocumento1.110 pagineFreescale Signal Processing Extension 2 ISA Reference ManualscribmynutsNessuna valutazione finora
- Docsity Uzam PLC Ew 22 ArticlesDocumento94 pagineDocsity Uzam PLC Ew 22 ArticlesRecep Ivedik100% (1)
- PLC With Pic16F648A: Microcontroller (PART 1)Documento5 paginePLC With Pic16F648A: Microcontroller (PART 1)artmx2003Nessuna valutazione finora
- Elo Touch Solutions Multi Touch Driver User Manual 6.4.0Documento15 pagineElo Touch Solutions Multi Touch Driver User Manual 6.4.0KalleNessuna valutazione finora
- Performance Products CatalogDocumento248 paginePerformance Products CatalogPedro Angel Alvarez Narvaez100% (1)
- Files and Mastercam PDFDocumento38 pagineFiles and Mastercam PDFGuillermo RamirezNessuna valutazione finora
- 1975 Argosy RV Owners ManualDocumento73 pagine1975 Argosy RV Owners ManualJaeyoung KimNessuna valutazione finora
- CNC AssemblyDocumento9 pagineCNC AssemblyAnjana_EdathadanNessuna valutazione finora
- Ultimax OP RevdDocumento1.104 pagineUltimax OP Revdujkica100% (1)
- Fanuc 6M Alarm CodesDocumento7 pagineFanuc 6M Alarm CodesKrassi GlogovskiNessuna valutazione finora
- EFI Two StrokeDocumento6 pagineEFI Two StrokegkarthikeyanNessuna valutazione finora
- Panasonic KX-TA624 Installation ManualDocumento12 paginePanasonic KX-TA624 Installation Manualsunhuynh100% (1)
- Heidenhain M Codes & G CODESDocumento18 pagineHeidenhain M Codes & G CODESMohamed Ben Salem100% (1)
- System Variables For 0iDocumento17 pagineSystem Variables For 0iRonNessuna valutazione finora
- VMMHardwareManual Ford ENG PDFDocumento27 pagineVMMHardwareManual Ford ENG PDFobd2worksNessuna valutazione finora
- Hardinge Spindle Bearing Replacement PDFDocumento4 pagineHardinge Spindle Bearing Replacement PDFJayakrishnaNessuna valutazione finora
- mf70 PKGDocumento19 paginemf70 PKGCarlos RamirezNessuna valutazione finora
- English - Lathe NGC - Operator's Manual - 2018Documento456 pagineEnglish - Lathe NGC - Operator's Manual - 2018Francisco Salas GalvánNessuna valutazione finora
- TS27R Tool Setting Probe Installation and Users GuideDocumento28 pagineTS27R Tool Setting Probe Installation and Users GuideAdina Denisa DumitrescuNessuna valutazione finora
- Engine Crankshaft Reluctor Wheel and Camshaft Gear Tooth Count InformationDocumento3 pagineEngine Crankshaft Reluctor Wheel and Camshaft Gear Tooth Count InformationCarlos Arturo de DiosNessuna valutazione finora
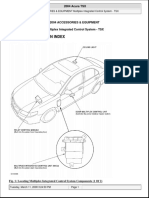
- Acura TSX 2004 Multiplex Integrated Control SystemDocumento55 pagineAcura TSX 2004 Multiplex Integrated Control Systemjorge antonio guillenNessuna valutazione finora
- Mikron VCP 1000 Duro enDocumento19 pagineMikron VCP 1000 Duro enAlexander DobbieNessuna valutazione finora
- Honda Goldwing Clarion CB Service Manual-50870Documento10 pagineHonda Goldwing Clarion CB Service Manual-50870Christopher KildahlNessuna valutazione finora
- Operator's Manual: Automatic Round Product Labeling SystemDocumento69 pagineOperator's Manual: Automatic Round Product Labeling SystemERICK HIOVANIS AVILA LARANessuna valutazione finora
- Installation Guide Mastercam x8Documento14 pagineInstallation Guide Mastercam x8David ObrienNessuna valutazione finora
- RichAuto Motion Control System ManualDocumento89 pagineRichAuto Motion Control System ManualSebastian Almaraz UnzuetaNessuna valutazione finora
- HUST CNC Lathe Controller ManualDocumento149 pagineHUST CNC Lathe Controller ManualNestor German PissoniNessuna valutazione finora
- MegasquirtDocumento207 pagineMegasquirtfelipe lucasNessuna valutazione finora
- Documentatie EMCO Compact 5 CNCDocumento3 pagineDocumentatie EMCO Compact 5 CNCFaur DanielNessuna valutazione finora
- Modbus Protocol For S3000/L Weighing Machine:: Master SlaveDocumento4 pagineModbus Protocol For S3000/L Weighing Machine:: Master SlaveBeto HernándezNessuna valutazione finora
- Modbus Protocol For S3000/L Weighing Machine:: Master SlaveDocumento4 pagineModbus Protocol For S3000/L Weighing Machine:: Master SlaveBeto HernándezNessuna valutazione finora
- Visual KV UM 96M0366 GB WW 0109-5 PDFDocumento392 pagineVisual KV UM 96M0366 GB WW 0109-5 PDFBeto HernándezNessuna valutazione finora
- Coffee Machine HMI Control and Data LoggingDocumento2 pagineCoffee Machine HMI Control and Data LoggingBeto HernándezNessuna valutazione finora
- SGM706Documento12 pagineSGM706Sveto SlNessuna valutazione finora
- A Works On The Principle of Photo Conductivity. Photo Conductivity Is An Optical Phenomenon in Which The Materials Conductivity Is Increased When Light Is Absorbed by The MaterialDocumento2 pagineA Works On The Principle of Photo Conductivity. Photo Conductivity Is An Optical Phenomenon in Which The Materials Conductivity Is Increased When Light Is Absorbed by The MaterialELMERNessuna valutazione finora
- Project ReportDocumento122 pagineProject Reportck13011992Nessuna valutazione finora
- Computer Literacy ExamDocumento4 pagineComputer Literacy ExamJason HallNessuna valutazione finora
- Servostar CD InstallDocumento254 pagineServostar CD InstallFabianLopezRojasNessuna valutazione finora
- JK Flip-Flop Waveform Drawing GuideDocumento14 pagineJK Flip-Flop Waveform Drawing GuideLimNessuna valutazione finora
- Chapter 04 Computer Architecture CH04-COA9e Upto MidDocumento8 pagineChapter 04 Computer Architecture CH04-COA9e Upto MidFasih DawoodNessuna valutazione finora
- Yamaha Rx-V467 Htr-4063 SMDocumento137 pagineYamaha Rx-V467 Htr-4063 SMsrdjanc69Nessuna valutazione finora
- Project Report Group1Documento91 pagineProject Report Group1api-332129590100% (2)
- Oversubscription and Density Best PracticesDocumento10 pagineOversubscription and Density Best PracticesCarlos Daniel TrujilloNessuna valutazione finora
- DVD Player Hidden CameraDocumento2 pagineDVD Player Hidden CameraromiyuddinNessuna valutazione finora
- Rect Um 0618 en Rv003phDocumento80 pagineRect Um 0618 en Rv003phnikhom_dk1565Nessuna valutazione finora
- Programmable Unijunction Transistor (PUT) Characteristics and ApplicationsDocumento28 pagineProgrammable Unijunction Transistor (PUT) Characteristics and ApplicationsVincent SpadeNessuna valutazione finora
- Guidelines For RF PCB Design and Microwave Materials OptionsDocumento15 pagineGuidelines For RF PCB Design and Microwave Materials OptionsjackNessuna valutazione finora
- V4C audio output and intercom pairing guideDocumento1 paginaV4C audio output and intercom pairing guideDiegoNessuna valutazione finora
- Interfacing Bluetooth With 8051Documento13 pagineInterfacing Bluetooth With 8051knightangleNessuna valutazione finora
- Lab Experiment-03 Differentiator and Integrator Amplifiers. 30/07/2020Documento6 pagineLab Experiment-03 Differentiator and Integrator Amplifiers. 30/07/2020Mandal AmanNessuna valutazione finora
- Ansys Hfss Antenna l09 0 Unit CellDocumento12 pagineAnsys Hfss Antenna l09 0 Unit CellCarriceiros Tour100% (1)
- History of Computer: ICFAI University, DehradunDocumento3 pagineHistory of Computer: ICFAI University, DehradunAbhineet JhaNessuna valutazione finora
- Microcontroller Based Transformer Monito PDFDocumento9 pagineMicrocontroller Based Transformer Monito PDFTariku TesfayeNessuna valutazione finora
- FlexiPanels User ManualDocumento312 pagineFlexiPanels User ManualChris Olson100% (1)
- KIA6283 CoreanDocumento7 pagineKIA6283 CoreanCris VMNessuna valutazione finora
- Huffman Encoder and Decoder Using VerilogDocumento3 pagineHuffman Encoder and Decoder Using VerilogInternational Journal of Application or Innovation in Engineering & ManagementNessuna valutazione finora
- CMPS09 - Tilt Compensated Compass ModuleDocumento5 pagineCMPS09 - Tilt Compensated Compass ModuleLuis Felipe Hernández ZambranoNessuna valutazione finora
- Introduction to Coding & Programming for BMW TechniciansDocumento9 pagineIntroduction to Coding & Programming for BMW TechniciansPaul JohnNessuna valutazione finora
- Monitor CPU & Battery Temp with ThermocouplesDocumento38 pagineMonitor CPU & Battery Temp with ThermocouplesMustapha BeziouiNessuna valutazione finora
- AN2726 USB To UART Bridging With Microchip USB7002 USB7050 USB7051 and USB7052 Hubs 00002726ADocumento12 pagineAN2726 USB To UART Bridging With Microchip USB7002 USB7050 USB7051 and USB7052 Hubs 00002726AAhmed Magdy El-SayedNessuna valutazione finora
- COMPAL LA-7401P (PAJ80) 2011-03-24 Rev 1.0 Schematic PDFDocumento56 pagineCOMPAL LA-7401P (PAJ80) 2011-03-24 Rev 1.0 Schematic PDFВиктор ГольченкоNessuna valutazione finora
- 1 s2.0 S1877050921005652 MainDocumento11 pagine1 s2.0 S1877050921005652 MainGustavo RipoliNessuna valutazione finora