Potrebbero piacerti anche
- Muros de ContenciónDocumento68 pagineMuros de ContenciónNaylaSb100% (17)
- Sistema cristalino trigonalDocumento5 pagineSistema cristalino trigonalLizbeth Hurtado SalazarNessuna valutazione finora
- Propuesta de Mejora Continua en El Área de ProduccionDocumento41 paginePropuesta de Mejora Continua en El Área de ProduccionElmer Arhuis Duran100% (2)
- Escala Gottam 17 Areas - ParejasDocumento10 pagineEscala Gottam 17 Areas - Parejaspepabandera100% (1)
- Sexo en Dos MundosDocumento170 pagineSexo en Dos MundosFrancisco Alberto Aguilar MadridNessuna valutazione finora
- UNI-FIGMM Informe N°7: Acidimetría y alcalimetríaDocumento23 pagineUNI-FIGMM Informe N°7: Acidimetría y alcalimetríaJuan QuispeNessuna valutazione finora
- Aparatos Empleados en PodologiaDocumento5 pagineAparatos Empleados en PodologiaCristobal Valenzuela100% (1)
- Propuestos Segundo ExamenDocumento3 paginePropuestos Segundo ExamenAldo Alvarez SalvadorNessuna valutazione finora
- Laboratorio Cristalografia UniDocumento7 pagineLaboratorio Cristalografia UniGuillermo de la Cruz100% (1)
- Informe 7 Sistemas Cristalinos PDFDocumento48 pagineInforme 7 Sistemas Cristalinos PDFalvaroNessuna valutazione finora
- Cuestionario Labo Nro 3Documento4 pagineCuestionario Labo Nro 3Brayan CondoriNessuna valutazione finora
- Análisis cualitativo de la malaquitaDocumento5 pagineAnálisis cualitativo de la malaquitaSisley Rosario Baez MauricioNessuna valutazione finora
- Sistema Tetragonal FDocumento33 pagineSistema Tetragonal FMiguel Alejandro Jara ChavezNessuna valutazione finora
- Alejo Zapata F. A. (2014) - Tablas Fisicoquimicas 1ed PDFDocumento89 pagineAlejo Zapata F. A. (2014) - Tablas Fisicoquimicas 1ed PDFLaisha Avendaño100% (1)
- Analisis de Aniones Del Grupo IVDocumento4 pagineAnalisis de Aniones Del Grupo IVYonar Shmit Gallo QuispeNessuna valutazione finora
- Mineralogia Capítulo III MaclasDocumento53 pagineMineralogia Capítulo III MaclasPercy Guerrero DíazNessuna valutazione finora
- CAPITULO I Introduccion A La Cristalografia y Mineralogia PDFDocumento23 pagineCAPITULO I Introduccion A La Cristalografia y Mineralogia PDFPiterMonzonMauricioNessuna valutazione finora
- Informe de Ingenieria ElectricaDocumento20 pagineInforme de Ingenieria ElectricadennisNessuna valutazione finora
- Arcillas y PropiedadesDocumento3 pagineArcillas y PropiedadesMiguel Angel AlvarezNessuna valutazione finora
- 02 Ecuaciones Diferenciales de Primer OrdenDocumento13 pagine02 Ecuaciones Diferenciales de Primer OrdenJESUS ALEXANDER CONDORI TICONANessuna valutazione finora
- Test 7 Acidimetria...........................Documento2 pagineTest 7 Acidimetria...........................Jhonatan EGNessuna valutazione finora
- Informe Practica N°3 Operaciones Comunes en El Trabajo de LaboratorioDocumento17 pagineInforme Practica N°3 Operaciones Comunes en El Trabajo de LaboratorioHuamani Elguera MįjælNessuna valutazione finora
- Modelo de Matricula Por Oficio 20-IIDocumento2 pagineModelo de Matricula Por Oficio 20-IIBrayan BarriosNessuna valutazione finora
- Monografia El CobreDocumento20 pagineMonografia El CobreAlberto Fernandez Vazquez100% (3)
- Clase piramidal ditrigonal - 3m: simetría, formas y mineralesDocumento4 pagineClase piramidal ditrigonal - 3m: simetría, formas y mineralesAlvaro CernaNessuna valutazione finora
- Práctica #02Documento8 paginePráctica #02Espinoza WendyNessuna valutazione finora
- Cuestionario 7 y 8 Analisis QuimicoDocumento6 pagineCuestionario 7 y 8 Analisis QuimicoSamir LimaNessuna valutazione finora
- Lab1 FisicoquimicaDocumento52 pagineLab1 FisicoquimicaErick Liñan AlarconNessuna valutazione finora
- Soluciones IIDocumento44 pagineSoluciones IIjuansNessuna valutazione finora
- Modalidad No Presencial: Silabo Por Competencias Curso: Termodinámica para MetalurgiaDocumento10 pagineModalidad No Presencial: Silabo Por Competencias Curso: Termodinámica para MetalurgiaMelek CuevaNessuna valutazione finora
- SuperfluidosDocumento6 pagineSuperfluidosZab Robledo RiveraNessuna valutazione finora
- 1er Informe de CuantitativaDocumento19 pagine1er Informe de CuantitativaRICARDO ADAN SEVILLA PALOMINONessuna valutazione finora
- Informe de Fisico Quimica Cinetica Figmm UniDocumento24 pagineInforme de Fisico Quimica Cinetica Figmm UniLuis Angel Paz SalazarNessuna valutazione finora
- Guia Laboratorio 1 Quimica UniDocumento7 pagineGuia Laboratorio 1 Quimica UniCRUZADO MENDOZA YESSENIA MINELLYNessuna valutazione finora
- Coloración A La Perla de BóraxDocumento4 pagineColoración A La Perla de BóraxAnaZuñigaSolis0% (1)
- Geometria DescriptivaDocumento51 pagineGeometria DescriptivaO Castro CelsoNessuna valutazione finora
- Informe 4. Determinacion de DensidadesDocumento10 pagineInforme 4. Determinacion de DensidadesJosoe Taco OjedaNessuna valutazione finora
- Mineralogia PlataDocumento3 pagineMineralogia PlataJorge Luis Meneses ChavezNessuna valutazione finora
- El Método Del Polvo CristalinoDocumento4 pagineEl Método Del Polvo Cristalinojuan ramirez huamanNessuna valutazione finora
- Los Orbitales MolecularesDocumento4 pagineLos Orbitales MolecularesJesus D. CerpaNessuna valutazione finora
- Grado Practicas 2 Q InorganicaDocumento82 pagineGrado Practicas 2 Q InorganicaCesarNessuna valutazione finora
- Diagrama TTTDocumento4 pagineDiagrama TTTmentebrillanteeNessuna valutazione finora
- Solucionario - Examen Pracial 20-2 - GE001RDocumento5 pagineSolucionario - Examen Pracial 20-2 - GE001RMichaelNessuna valutazione finora
- MINERALOGÉNESISDocumento6 pagineMINERALOGÉNESISYanpaul B ChNessuna valutazione finora
- Acetato D PlataDocumento11 pagineAcetato D PlataMaritza SantillanNessuna valutazione finora
- Informe de Laboratorio #1-FisicoquimicaDocumento54 pagineInforme de Laboratorio #1-FisicoquimicaFernando Callata CardenasNessuna valutazione finora
- Proyecciones Mineralogia Sistematica y DeterminativaDocumento50 pagineProyecciones Mineralogia Sistematica y DeterminativaLuis Gustavo Vera Segura100% (1)
- Mineralización en La Zona de Sulfuros en Cerro YanacochaDocumento12 pagineMineralización en La Zona de Sulfuros en Cerro YanacochacalamarossNessuna valutazione finora
- Informe de campo - Mineralogía de Cerros de Camacho y Lomas de MangomarcaDocumento22 pagineInforme de campo - Mineralogía de Cerros de Camacho y Lomas de MangomarcaDiego Alvarado100% (1)
- Sexto LaboratorioDocumento18 pagineSexto LaboratorioFabrizioNessuna valutazione finora
- Petrología-Mineralogía - MICHIQUILLAYDocumento9 paginePetrología-Mineralogía - MICHIQUILLAYMostacero Hernández Josvel AbrahamNessuna valutazione finora
- La estructura interna de la Tierra y sus capas mecánicasDocumento34 pagineLa estructura interna de la Tierra y sus capas mecánicasFernando SánchezNessuna valutazione finora
- Caracterización del comportamiento estructural de la galería filtrante de TAMBOMACHAYDocumento37 pagineCaracterización del comportamiento estructural de la galería filtrante de TAMBOMACHAYCalitoo IGNessuna valutazione finora
- Quimica - Practica 3 - Linked Carrera ReyesDocumento12 pagineQuimica - Practica 3 - Linked Carrera ReyesLinked Carrera Reyes50% (2)
- UPTC: 2.1% humedad en carbónDocumento8 pagineUPTC: 2.1% humedad en carbónPaula A FernandezmjNessuna valutazione finora
- Laboratorio de Plomo MIERCOLES (8-12)Documento9 pagineLaboratorio de Plomo MIERCOLES (8-12)Edson RiveraNessuna valutazione finora
- 01 Introduccion A Las Operaciones MetalurgicasDocumento19 pagine01 Introduccion A Las Operaciones MetalurgicasMaxiito BradlyNessuna valutazione finora
- Ing. T.Alcarraz Alfaro (120920)Documento2 pagineIng. T.Alcarraz Alfaro (120920)PolRamosNessuna valutazione finora
- Ejercicios para La Practica CalificadaDocumento1 paginaEjercicios para La Practica CalificadaJemmy Rosario Gutierrez CelisNessuna valutazione finora
- Eje 5Documento15 pagineEje 5Juan Alonso Quijano EsdrasNessuna valutazione finora
- Aplicaciones de las ecuaciones diferenciales en ingeniería mineraDocumento28 pagineAplicaciones de las ecuaciones diferenciales en ingeniería mineraOliver Edwin Santos FerrerNessuna valutazione finora
- Informe Del Trabajo de Investigacion Cristalografia Mineralogia y PetrologiaDocumento42 pagineInforme Del Trabajo de Investigacion Cristalografia Mineralogia y PetrologiaHernando Tapia CabreraNessuna valutazione finora
- Silabo Icacit Fisica 2 (Electricidad y Magnetismo) Ing Electronica 2019bDocumento4 pagineSilabo Icacit Fisica 2 (Electricidad y Magnetismo) Ing Electronica 2019bJuan Carlos TPintoNessuna valutazione finora
- Electrólisis de Metales. Laboratorio N°5. FisicoquimicaDocumento16 pagineElectrólisis de Metales. Laboratorio N°5. FisicoquimicaMARÍA JESÚS VARGAS ESPINOZANessuna valutazione finora
- CAPITULO I - Cristalografia - 2da ParteDocumento75 pagineCAPITULO I - Cristalografia - 2da Parteelmer ocas telloNessuna valutazione finora
- INTRODUCCIONDocumento2 pagineINTRODUCCIONRenira LunaNessuna valutazione finora
- EVOLUCIÓN CENOZOICA DE SIERRA NEVADA DE SANTA MARTA ResumenDocumento4 pagineEVOLUCIÓN CENOZOICA DE SIERRA NEVADA DE SANTA MARTA ResumenRenira LunaNessuna valutazione finora
- Correción Muestra CJR 011Documento2 pagineCorreción Muestra CJR 011Renira LunaNessuna valutazione finora
- SEV en la Fundación Universitaria del Área AndinaDocumento11 pagineSEV en la Fundación Universitaria del Área AndinaRenira LunaNessuna valutazione finora
- Proyecto de GeotecniaDocumento49 pagineProyecto de GeotecniaRenira LunaNessuna valutazione finora
- Acuerdo de ParisDocumento18 pagineAcuerdo de ParisRenira LunaNessuna valutazione finora
- Tituloh nsr10Documento72 pagineTituloh nsr10osos14Nessuna valutazione finora
- Libro 1Documento2 pagineLibro 1Renira LunaNessuna valutazione finora
- H1-P01-PR12-F06 Solicitud de CapacitaciónDocumento15 pagineH1-P01-PR12-F06 Solicitud de CapacitaciónRenira LunaNessuna valutazione finora
- La Placa Caribe Se Sitúa Aproximadamente Entre Las Longitudes de 60º y 90º W y Entre Las Latitudes de 10º y 20º NDocumento3 pagineLa Placa Caribe Se Sitúa Aproximadamente Entre Las Longitudes de 60º y 90º W y Entre Las Latitudes de 10º y 20º NRenira LunaNessuna valutazione finora
- Informacion Por Grupo para El InformeDocumento11 pagineInformacion Por Grupo para El InformeRenira LunaNessuna valutazione finora
- Guia de Orientacion Modulos-De-Competencias-Genericas-Saber-Tyt-2017-2 PDFDocumento87 pagineGuia de Orientacion Modulos-De-Competencias-Genericas-Saber-Tyt-2017-2 PDFEstefany0% (1)
- Informacion Por Grupo para El InformeDocumento11 pagineInformacion Por Grupo para El InformeRenira LunaNessuna valutazione finora
- H1-P01-PR12-F06 Solicitud de CapacitaciónDocumento15 pagineH1-P01-PR12-F06 Solicitud de CapacitaciónRenira LunaNessuna valutazione finora
- Acuerdo de ParisDocumento18 pagineAcuerdo de ParisRenira LunaNessuna valutazione finora
- Estudio Geofísico Zona Inestable San Ignacio KM18+850 PDFDocumento32 pagineEstudio Geofísico Zona Inestable San Ignacio KM18+850 PDFRenira LunaNessuna valutazione finora
- TectonicaDocumento15 pagineTectonicaRenira LunaNessuna valutazione finora
- Guia de Orientacion Modulos-De-Competencias-Genericas-Saber-Tyt-2017-2 PDFDocumento87 pagineGuia de Orientacion Modulos-De-Competencias-Genericas-Saber-Tyt-2017-2 PDFEstefany0% (1)
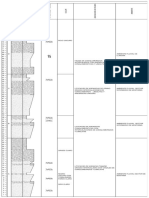
- 21columna EstratigrafiaDocumento1 pagina21columna EstratigrafiaRenira LunaNessuna valutazione finora
- Cronograma Campo 1Documento24 pagineCronograma Campo 1Renira LunaNessuna valutazione finora
- Cuadernillo de Preguntas Razonamiento Saber Tyt 2018-1Documento15 pagineCuadernillo de Preguntas Razonamiento Saber Tyt 2018-1Miguel Ángel Lizarazo Mejia0% (1)
- Movimiento de Las Placas Caribe, Norte y Suramericana Imagenes PDFDocumento20 pagineMovimiento de Las Placas Caribe, Norte y Suramericana Imagenes PDFDaniel PreciadoNessuna valutazione finora
- Perforadora de Roca HidráulicaDocumento8 paginePerforadora de Roca HidráulicaRenira LunaNessuna valutazione finora
- Articulo de RemediacionDocumento10 pagineArticulo de RemediacionRenira LunaNessuna valutazione finora
- Muestreo CarbonDocumento85 pagineMuestreo CarbonRenira LunaNessuna valutazione finora
- Informe Sensibilidad de TaludesDocumento14 pagineInforme Sensibilidad de TaludesAngel ArmijoNessuna valutazione finora
- Modulo 3. Mineralogia GeneralidadesDocumento137 pagineModulo 3. Mineralogia GeneralidadesjersonNessuna valutazione finora
- Cristalo QUIMICADocumento20 pagineCristalo QUIMICARenira LunaNessuna valutazione finora
- PQ-Proceso de Obtención de TiO2Documento12 paginePQ-Proceso de Obtención de TiO2Luis Alfonso Martinez FdezNessuna valutazione finora
- Reforma agraria en ColombiaDocumento2 pagineReforma agraria en ColombiaSARA ESTEFANIA HERNANDEZ ARBOLEDANessuna valutazione finora
- La Configuracion Del Pensamiento AnarquistaDocumento8 pagineLa Configuracion Del Pensamiento AnarquistaMarcelo Sandoval VargasNessuna valutazione finora
- Herramientas recolección datos proyectosDocumento4 pagineHerramientas recolección datos proyectosGeraldine Aguirre OsorioNessuna valutazione finora
- Protocolo T.A.T - C.A.T. BellakDocumento2 pagineProtocolo T.A.T - C.A.T. BellakEsteban BetancurNessuna valutazione finora
- It MaissDocumento8 pagineIt MaisslabavillaNessuna valutazione finora
- Plan de Seguridad y Salud JardinDocumento26 paginePlan de Seguridad y Salud JardinmorillosopankevinNessuna valutazione finora
- Infografia Isla Basura PacificoDocumento1 paginaInfografia Isla Basura PacificoJudithNessuna valutazione finora
- InformeDocumento11 pagineInformeLuis Eduardo Tanta CuevaNessuna valutazione finora
- Casa Osambela U Oquendo-CC Inca Garcilazo PDFDocumento61 pagineCasa Osambela U Oquendo-CC Inca Garcilazo PDFBruno Leonardo CaceresNessuna valutazione finora
- Seguridad e higiene en carpinteríaDocumento51 pagineSeguridad e higiene en carpinteríaManuel Alejandro Muñoz100% (2)
- Ejercicios de Simetrías en Figuras Planas y PoliedrosDocumento7 pagineEjercicios de Simetrías en Figuras Planas y PoliedrosEva Acosta GavilánNessuna valutazione finora
- AUTOMATIZACIONDocumento4 pagineAUTOMATIZACIONJuan Carlos TidoniNessuna valutazione finora
- Es Posible Gerenciar Negociaciones PDFDocumento20 pagineEs Posible Gerenciar Negociaciones PDFMarco HernándezNessuna valutazione finora
- Mex Torres Pedro Antonio - Bayer Multinacional PDFDocumento25 pagineMex Torres Pedro Antonio - Bayer Multinacional PDFPedro AntonioNessuna valutazione finora
- PsicoanaliticaDocumento2 paginePsicoanalitica3 a 1 eternoNessuna valutazione finora
- Proyecto 3 Mundo DigitalDocumento64 pagineProyecto 3 Mundo DigitalaaronNessuna valutazione finora
- Tipos de datos en programaciónDocumento10 pagineTipos de datos en programaciónlol coitaNessuna valutazione finora
- Esquema OvejeroDocumento3 pagineEsquema OvejeroDiego Londoño BluzmanisNessuna valutazione finora
- Sistema EléctricoDocumento14 pagineSistema EléctricoCRISTHIAN DIAZ GAMBOANessuna valutazione finora
- Pregunta Dinamizadora Unidad 1 BalancedDocumento2 paginePregunta Dinamizadora Unidad 1 BalancedFernando Miller100% (1)
- Planificacion UrbanaDocumento4 paginePlanificacion UrbanarenabNessuna valutazione finora
- 2 Roles y Estereotipos de GéneroDocumento15 pagine2 Roles y Estereotipos de GéneroYareli MolinaNessuna valutazione finora
- Imagenologia Convencional Fundamentos y ConceptualizacionDocumento12 pagineImagenologia Convencional Fundamentos y ConceptualizacionMayra RiosNessuna valutazione finora
- Manual Usuario Radios KenwoodDocumento70 pagineManual Usuario Radios KenwoodANGEL OSORIO ACOSTANessuna valutazione finora
- Camino Del LidelDocumento4 pagineCamino Del LidelAngel Ignacio Rodriguez MedinaNessuna valutazione finora