Potrebbero piacerti anche
- Nano Coating Process PDFDocumento2 pagineNano Coating Process PDFMichael PrzybylskiNessuna valutazione finora
- Big Scale Salt Molten Battery PDFDocumento11 pagineBig Scale Salt Molten Battery PDFHery Purwanto100% (1)
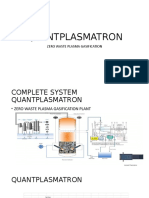
- QUANTPLASMATRONDocumento3 pagineQUANTPLASMATRONHery PurwantoNessuna valutazione finora
- Plasma Supported Combustion: By, Prof DR ING M Hery Purwanto MSCDocumento13 paginePlasma Supported Combustion: By, Prof DR ING M Hery Purwanto MSCHery Purwanto100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- REVIEWER FOR ChE COMPRE 07082018Documento352 pagineREVIEWER FOR ChE COMPRE 07082018Ahe BeongNessuna valutazione finora
- What Is Organic ChemistryDocumento4 pagineWhat Is Organic Chemistrybas haNessuna valutazione finora
- Advanced materials processing techniques for automotive, aerospace and energy applicationsDocumento3 pagineAdvanced materials processing techniques for automotive, aerospace and energy applicationsvinothksNessuna valutazione finora
- Adiabatic Operation of A Tubular Reactor For Cracking of Acetone (Prob. 4.3)Documento10 pagineAdiabatic Operation of A Tubular Reactor For Cracking of Acetone (Prob. 4.3)ahmed ubeedNessuna valutazione finora
- Piping & Instrumentation DiagramDocumento1 paginaPiping & Instrumentation DiagramSearch45Nessuna valutazione finora
- (Topics in Applied Chemistry) Masaru Matsuoka (Auth.), Masaru Matsuoka (Eds.) - Infrared Absorbing Dyes-Springer US (1990) PDFDocumento230 pagine(Topics in Applied Chemistry) Masaru Matsuoka (Auth.), Masaru Matsuoka (Eds.) - Infrared Absorbing Dyes-Springer US (1990) PDFHERNANDEZ1010Nessuna valutazione finora
- Spark Test of Metals: B B A ADocumento4 pagineSpark Test of Metals: B B A ALovely NievesNessuna valutazione finora
- 40nicrmo7-3: Steel GradeDocumento3 pagine40nicrmo7-3: Steel GradeGanesh K CNessuna valutazione finora
- Air Conditioning and Refrigeration: Muhammad Bilal KhanDocumento25 pagineAir Conditioning and Refrigeration: Muhammad Bilal KhanMuzammalRehmanNessuna valutazione finora
- D ILIPDocumento30 pagineD ILIPAnonymous YloEbh0% (1)
- A New Paradigm Shift For The Green Synthesis of Antibacterial Silver Nanoparticles Utilizing Plant ExtractsDocumento10 pagineA New Paradigm Shift For The Green Synthesis of Antibacterial Silver Nanoparticles Utilizing Plant Extractsmahatir muhammadNessuna valutazione finora
- An Experimental Study of AcidizingDocumento11 pagineAn Experimental Study of Acidizinggigi17Nessuna valutazione finora
- Lightening ArresterDocumento13 pagineLightening Arresterrohanlagad10Nessuna valutazione finora
- Synthesis of Biodiesel Via Acid CatalysisDocumento11 pagineSynthesis of Biodiesel Via Acid CatalysisMạnh BùiNessuna valutazione finora
- Chemical Characterization of Commercial Liquid Smoke ProductsDocumento14 pagineChemical Characterization of Commercial Liquid Smoke ProductsLuciano EscobarNessuna valutazione finora
- Thermo Fisher Scientific: Validation ReportDocumento20 pagineThermo Fisher Scientific: Validation ReportAlexandra FloreaNessuna valutazione finora
- TDS 00000542 1 Go en PDFDocumento3 pagineTDS 00000542 1 Go en PDFEDBNessuna valutazione finora
- CM5241 Literature Review Project TopicsDocumento3 pagineCM5241 Literature Review Project TopicsCheryldine LimNessuna valutazione finora
- PMMA Nanofibres Using Different SolventsDocumento7 paginePMMA Nanofibres Using Different SolventsvetrixNessuna valutazione finora
- Why Is Mineralogical Data Essential For Designing A Metallurgical Test Work Program For Process Selection and Design?Documento10 pagineWhy Is Mineralogical Data Essential For Designing A Metallurgical Test Work Program For Process Selection and Design?AldoNessuna valutazione finora
- Austenitic Cast Iron Welding Detailsfrequently Aske-WPS OfficeDocumento17 pagineAustenitic Cast Iron Welding Detailsfrequently Aske-WPS Officearjun prajapatiNessuna valutazione finora
- Cover Page: Liquids and SolidsDocumento20 pagineCover Page: Liquids and SolidsCHELSEA NEUMANNNessuna valutazione finora
- Chemistry Investigatory ProjectDocumento14 pagineChemistry Investigatory ProjectV P SomeshwarNessuna valutazione finora
- Colorimetry 1Documento23 pagineColorimetry 1Denise CssNessuna valutazione finora
- Find Density, Mass or Volume from Given ValuesDocumento1 paginaFind Density, Mass or Volume from Given ValuesDaniel Dube100% (1)
- DJH PresentationDocumento20 pagineDJH PresentationThanh Dung LeNessuna valutazione finora
- IV (M) QM Gamma Ray MicroscopeDocumento2 pagineIV (M) QM Gamma Ray MicroscopeAbhigyan HazarikaNessuna valutazione finora
- PZC of Titanium DioxideDocumento14 paginePZC of Titanium DioxideSuja GeorgeNessuna valutazione finora
- Nature of Adherence of Porcelain Enamels To MetalsDocumento22 pagineNature of Adherence of Porcelain Enamels To MetalsFernando BarreraNessuna valutazione finora
- Networking Newsletter by SlidesgoDocumento38 pagineNetworking Newsletter by SlidesgoHenrique AlvesNessuna valutazione finora