Potrebbero piacerti anche
- 2.3. Normas NacionalesDocumento22 pagine2.3. Normas NacionalesLuisHomeroZhañayNessuna valutazione finora
- Analisis de RiesgoDocumento2 pagineAnalisis de RiesgoLuisHomeroZhañayNessuna valutazione finora
- 3.2. Seguridad VehicularDocumento48 pagine3.2. Seguridad VehicularLuisHomeroZhañayNessuna valutazione finora
- 3.3. Contaminacion AmbientalDocumento91 pagine3.3. Contaminacion AmbientalLuisHomeroZhañayNessuna valutazione finora
- 3.1. Guias de ControlDocumento23 pagine3.1. Guias de ControlFernando VargasNessuna valutazione finora
- Sistema PT CumminsDocumento19 pagineSistema PT CumminsLuisHomeroZhañayNessuna valutazione finora
- PVC LevasDocumento4 paginePVC LevasLuisHomeroZhañayNessuna valutazione finora
- Foto SensoresDocumento9 pagineFoto SensoresLuisHomeroZhañayNessuna valutazione finora
- 02-02-2021 Convenios Vigentes de Vinculación Con La Sociedad Sede CuencaDocumento7 pagine02-02-2021 Convenios Vigentes de Vinculación Con La Sociedad Sede CuencaLuisHomeroZhañayNessuna valutazione finora
- CaratulaDocumento1 paginaCaratulaLuisHomeroZhañayNessuna valutazione finora
- Chevrolet LUV Dmax SensoresDocumento11 pagineChevrolet LUV Dmax SensoresLuisHomeroZhañayNessuna valutazione finora
- Guia Final 3 Calculo de Parámetros Geométricos, Indicados y Efectivos.Documento21 pagineGuia Final 3 Calculo de Parámetros Geométricos, Indicados y Efectivos.Christian PullaNessuna valutazione finora
- Ups CT004468Documento211 pagineUps CT004468Pedro GTNessuna valutazione finora
- Prueba Nº2 PVCDocumento14 paginePrueba Nº2 PVCLuisHomeroZhañayNessuna valutazione finora
- Caracterizacion Sensores.Documento21 pagineCaracterizacion Sensores.LuisHomeroZhañayNessuna valutazione finora
- Calculos Leva PVS EerciciosDocumento7 pagineCalculos Leva PVS EerciciosLuisHomeroZhañayNessuna valutazione finora
- PVC LevasDocumento4 paginePVC LevasLuisHomeroZhañayNessuna valutazione finora
- Desarrollo Tecnológico en Ingeniería AutomotrizDocumento453 pagineDesarrollo Tecnológico en Ingeniería AutomotrizLuisHomeroZhañay100% (1)
- Tiempo Inyeccion PDFDocumento57 pagineTiempo Inyeccion PDFLuisHomeroZhañayNessuna valutazione finora
- Cal CuloDocumento1 paginaCal CuloLuisHomeroZhañayNessuna valutazione finora
- Caracterisacion de Sensores.Documento13 pagineCaracterisacion de Sensores.LuisHomeroZhañayNessuna valutazione finora
- Cem343226 PDFDocumento111 pagineCem343226 PDFRigobertoZacariasPérezNessuna valutazione finora
- Producto 1 Tomo IDocumento207 pagineProducto 1 Tomo ILuisHomeroZhañayNessuna valutazione finora
- Calculos LevaDocumento7 pagineCalculos LevaLuisHomeroZhañayNessuna valutazione finora
- Inyeccion A GasolinaDocumento29 pagineInyeccion A GasolinaPetersito Ch CNessuna valutazione finora
- 2.2. Normas InternacionalesDocumento31 pagine2.2. Normas InternacionalesFernando VargasNessuna valutazione finora
- Sistema de Distribución de ValvulassDocumento18 pagineSistema de Distribución de Valvulassrodrigo.nievasNessuna valutazione finora
- DelegDocumento4 pagineDelegLuisHomeroZhañayNessuna valutazione finora
- 2.3. Normas NacionalesDocumento22 pagine2.3. Normas NacionalesLuisHomeroZhañayNessuna valutazione finora
- 2.1. Intro LotttsvDocumento16 pagine2.1. Intro LotttsvFernando VargasNessuna valutazione finora
- Formato Boletin para PDFDocumento6 pagineFormato Boletin para PDFLucas PetittiNessuna valutazione finora
- Integración Numérica (Unidad Iv)Documento25 pagineIntegración Numérica (Unidad Iv)Daniel AnzuetoNessuna valutazione finora
- Base DatosDocumento7 pagineBase DatosMALHER DAVID RAMOS CANCHOMANIANessuna valutazione finora
- Tutorial Preinscripcion CarrerasDocumento19 pagineTutorial Preinscripcion CarrerasSolo ImpresionesNessuna valutazione finora
- Ejerciciso Propuestos PLC Rivera Jimenez AlejandroDocumento28 pagineEjerciciso Propuestos PLC Rivera Jimenez AlejandroALEJANDRO RIVERA JIMENEZNessuna valutazione finora
- Proyecto 1 BASE DE DATOS SQL Server y MySQLDocumento13 pagineProyecto 1 BASE DE DATOS SQL Server y MySQLLerter RomeroNessuna valutazione finora
- Portabilidad Modelos Eolicos y Fotovoltaicos PDFDocumento15 paginePortabilidad Modelos Eolicos y Fotovoltaicos PDFFrancisco GuerraNessuna valutazione finora
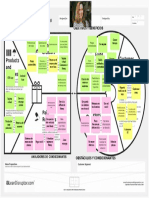
- U5 Value Proposition Canvas (Ejemplo 2)Documento1 paginaU5 Value Proposition Canvas (Ejemplo 2)Ari Ben100% (1)
- Documento Semana 5 ModularidadDocumento29 pagineDocumento Semana 5 ModularidadMónica Fabiola Franco MendozaNessuna valutazione finora
- Teoría Del ColorDocumento7 pagineTeoría Del ColorLeonel SandovalNessuna valutazione finora
- 2.2 Software Metodos3Documento13 pagine2.2 Software Metodos3ANGEL NOE PECH CHUCNessuna valutazione finora
- Gestión de Las Relaciones Con Los ClientesDocumento20 pagineGestión de Las Relaciones Con Los ClientesJean Pool JaimeNessuna valutazione finora
- Comunicaciones IndustrialesDocumento1 paginaComunicaciones IndustrialesANGEL HERNANDO GARZON SARZOSANessuna valutazione finora
- Requisitos de Software para EcommerceDocumento8 pagineRequisitos de Software para EcommerceMIGUEL TOVAR 99Nessuna valutazione finora
- Balanza Scale User Manual - Espac391olDocumento25 pagineBalanza Scale User Manual - Espac391olEnrique LezcanoNessuna valutazione finora
- Manual Ecomatic AUTEL ECO-S64Documento30 pagineManual Ecomatic AUTEL ECO-S64Cristiano Piovesan0% (1)
- Proyecto RecrishDocumento9 pagineProyecto RecrishHoliver NorabuenaNessuna valutazione finora
- Formato Plan de AuditoríaDocumento1 paginaFormato Plan de AuditoríaCristian Eduardo Calderon MejiaNessuna valutazione finora
- Importancia de La Estadística en La InformáticaDocumento2 pagineImportancia de La Estadística en La InformáticaElban FelizNessuna valutazione finora
- Trabajo de Informatica de Los VirusDocumento13 pagineTrabajo de Informatica de Los VirusMarlon Mora MorffiNessuna valutazione finora
- UADE BD-Clase 02-Modelo RelacionalDocumento39 pagineUADE BD-Clase 02-Modelo RelacionalTomas TripodiNessuna valutazione finora
- Caso Practico 2Documento2 pagineCaso Practico 2Rolando PalaciosNessuna valutazione finora
- Caso de Monopolio MicrosoftDocumento7 pagineCaso de Monopolio Microsoftftjwyrccx2Nessuna valutazione finora
- Enmienda No (1) - 1 SDP PS00049944022008Documento47 pagineEnmienda No (1) - 1 SDP PS00049944022008eduardo_quintanill_3Nessuna valutazione finora
- Josue #3 Hojas de Estilo en Cascada (CSS) IIDocumento6 pagineJosue #3 Hojas de Estilo en Cascada (CSS) IIJOSUE CRUZ PEREZNessuna valutazione finora
- Pedagogía TransformativaDocumento4 paginePedagogía TransformativaLeiryNessuna valutazione finora
- El Cartel Incomodo. El Fin de Los Beltran Leyva y La Hegemonia Del Chapo Guzman de Jose RevelesDocumento1 paginaEl Cartel Incomodo. El Fin de Los Beltran Leyva y La Hegemonia Del Chapo Guzman de Jose RevelesJuan FdezNessuna valutazione finora
- Caraguay Caraguay, Leonardo FavioDocumento173 pagineCaraguay Caraguay, Leonardo Faviojhonny padillaNessuna valutazione finora
- TIP 130 - Ensayos FUJI para El Desarrollo de Juntas AjusaDocumento4 pagineTIP 130 - Ensayos FUJI para El Desarrollo de Juntas AjusaIsmael Grueso GarridoNessuna valutazione finora
- MANUAL DE USUARIOcontpai BancosDocumento88 pagineMANUAL DE USUARIOcontpai Bancosjaqueline hernandez hernandezNessuna valutazione finora