Potrebbero piacerti anche
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Da EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Nessuna valutazione finora
- Implementation: 1 Implementing FIR FiltersDocumento11 pagineImplementation: 1 Implementing FIR FiltersCristóbal Eduardo Carreño MosqueiraNessuna valutazione finora
- Lab 2: Sampling, Convolution, LTI Systems, and Difference EquationsDocumento5 pagineLab 2: Sampling, Convolution, LTI Systems, and Difference EquationsJane MoujaessNessuna valutazione finora
- DSP Module 3Documento41 pagineDSP Module 3Ajay kumarNessuna valutazione finora
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Da EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Nessuna valutazione finora
- DFT FFT NotesDocumento41 pagineDFT FFT NotesManthan PandhareNessuna valutazione finora
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64Da EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64Nessuna valutazione finora
- Lab4 ReportDocumento19 pagineLab4 ReportVipulNessuna valutazione finora
- Part BDocumento16 paginePart BRamakrishnan Harihara VenkatasubramaniaNessuna valutazione finora
- Discrete Fourier Transform PDFDocumento12 pagineDiscrete Fourier Transform PDFKarina5274Nessuna valutazione finora
- Lab 1: DTFT, DFT, and DFT Spectral Analysis: (LABE 410) Dr. Jad Abou ChaayaDocumento4 pagineLab 1: DTFT, DFT, and DFT Spectral Analysis: (LABE 410) Dr. Jad Abou ChaayaJane MoujaessNessuna valutazione finora
- The Sequence y (N) Is Obtained From IDFT of Y (K) - by Definition of IDFTDocumento28 pagineThe Sequence y (N) Is Obtained From IDFT of Y (K) - by Definition of IDFTDrìftNessuna valutazione finora
- Unit 4 DFT and FFTDocumento42 pagineUnit 4 DFT and FFThrrameshhrNessuna valutazione finora
- Computation of the n-th decimal digit of π with low memory: Xavier Gourdon February 11, 2003Documento9 pagineComputation of the n-th decimal digit of π with low memory: Xavier Gourdon February 11, 2003Gifari ZulkarnaenNessuna valutazione finora
- Digital Signal Processing PROF. S. C. Dutta Roy Department of Electrical Engineering IIT Delhi Discrete Fourier Transform (D F T Cont.) Lecture-10Documento15 pagineDigital Signal Processing PROF. S. C. Dutta Roy Department of Electrical Engineering IIT Delhi Discrete Fourier Transform (D F T Cont.) Lecture-10Sudha PatelNessuna valutazione finora
- A Pseudospectral Method For Periodic FunctionsDocumento5 pagineA Pseudospectral Method For Periodic FunctionsJosue CofeeNessuna valutazione finora
- DTFT ContinueDocumento51 pagineDTFT Continueraskal23Nessuna valutazione finora
- Digital Signal Processing (Lecture2) : Dr. Anumoy Ghosh Assistant Professor ECE DeptDocumento20 pagineDigital Signal Processing (Lecture2) : Dr. Anumoy Ghosh Assistant Professor ECE DeptAyush SrivastavaNessuna valutazione finora
- DSP Lab 2RTDocumento5 pagineDSP Lab 2RTMatlali SeutloaliNessuna valutazione finora
- Lab 1RTDocumento8 pagineLab 1RTMatlali SeutloaliNessuna valutazione finora
- 3 Goertzel's AlgorithmDocumento41 pagine3 Goertzel's Algorithmvidya_sagar826100% (1)
- Lab 10-Descrete Fourier Transform and Circular ConvolutionDocumento8 pagineLab 10-Descrete Fourier Transform and Circular ConvolutionAleena QureshiNessuna valutazione finora
- Lab Sheet 5 Discrete Fourier Transform (DFT) Using MATLABDocumento16 pagineLab Sheet 5 Discrete Fourier Transform (DFT) Using MATLABSharmin RiniNessuna valutazione finora
- Digital Signal Processing Lecture Notes - 22nov2010 - v4Documento11 pagineDigital Signal Processing Lecture Notes - 22nov2010 - v4Thiagu RajivNessuna valutazione finora
- EE5130: Digital Signal ProcessingDocumento3 pagineEE5130: Digital Signal ProcessingSHUBHAM ANAND VERMA EE20M540Nessuna valutazione finora
- Maximum Length SequenceDocumento9 pagineMaximum Length SequenceLucio BianchiNessuna valutazione finora
- Notes On Discrete Fourier Transforms Physics 204B: T N 2T N KT N (N 1) T N I TDocumento4 pagineNotes On Discrete Fourier Transforms Physics 204B: T N 2T N KT N (N 1) T N I TSachin PatiNessuna valutazione finora
- 188-Article Text-852-3-10-20221111Documento13 pagine188-Article Text-852-3-10-20221111YC ChanNessuna valutazione finora
- DSP Fundamentals Lecture Note Set #21 The FFT: 1 Course AnnouncementsDocumento5 pagineDSP Fundamentals Lecture Note Set #21 The FFT: 1 Course AnnouncementsZaid Al-AlshaikhNessuna valutazione finora
- Reviewof The Fourier TransformDocumento18 pagineReviewof The Fourier Transformjamesyu100% (2)
- Digital Signal Processing Important Two Mark Questions With AnswersDocumento15 pagineDigital Signal Processing Important Two Mark Questions With AnswerssaiNessuna valutazione finora
- Topic22 DFT and FFTDocumento7 pagineTopic22 DFT and FFTManikanta KrishnamurthyNessuna valutazione finora
- Lab 3 DSP. Discrete Fourier TransformDocumento16 pagineLab 3 DSP. Discrete Fourier TransformTrí TừNessuna valutazione finora
- DSP 2 Marks Q&a1Documento38 pagineDSP 2 Marks Q&a1shankarNessuna valutazione finora
- It1252 Digital Signal ProcessingDocumento22 pagineIt1252 Digital Signal ProcessingainugiriNessuna valutazione finora
- Digital Signal Processing Important 2 Two Mark Question and Answer IT 1252Documento14 pagineDigital Signal Processing Important 2 Two Mark Question and Answer IT 1252startedforfunNessuna valutazione finora
- EEE 5502 Code 4: 1 ProblemDocumento4 pagineEEE 5502 Code 4: 1 ProblemMichael OlveraNessuna valutazione finora
- Discrete Fourier Transform Part 1Documento48 pagineDiscrete Fourier Transform Part 1eloira1214Nessuna valutazione finora
- Computing DFTDocumento12 pagineComputing DFThakkem bNessuna valutazione finora
- Unit I - Discrete Fourier Transform Part - ADocumento10 pagineUnit I - Discrete Fourier Transform Part - AindhuNessuna valutazione finora
- DSP Manual Exp1 9Documento34 pagineDSP Manual Exp1 9SaurabhNessuna valutazione finora
- EE120: S S: University of California, Berkeley Department of EECS (Spring 2021)Documento5 pagineEE120: S S: University of California, Berkeley Department of EECS (Spring 2021)David Matthew Kurniawan BEngNessuna valutazione finora
- Course 07 - DFT (Contd), FFTDocumento48 pagineCourse 07 - DFT (Contd), FFTModitha LakshanNessuna valutazione finora
- Fourier Series & Fourier Transforms: SynopsisDocumento11 pagineFourier Series & Fourier Transforms: SynopsisSafiun NaharNessuna valutazione finora
- Discrete Fourier TransformDocumento21 pagineDiscrete Fourier TransformShubham BhaleraoNessuna valutazione finora
- It6502 2m-1 RejinpaulDocumento12 pagineIt6502 2m-1 RejinpaulTejaswini PydiNessuna valutazione finora
- Fast Signal Processing Algorithms Week 3Documento58 pagineFast Signal Processing Algorithms Week 3M Ali NaeemNessuna valutazione finora
- IT257 DAA Divide Conquer Radix2 DIT FFT1Documento122 pagineIT257 DAA Divide Conquer Radix2 DIT FFT1Simhadri SevithaNessuna valutazione finora
- The Fast Fourier Transform DemystifiedDocumento4 pagineThe Fast Fourier Transform DemystifiedAndy2102Nessuna valutazione finora
- 1 The Euler Phi FunctionDocumento19 pagine1 The Euler Phi FunctionRico LeeNessuna valutazione finora
- Lab6 2023 2024 FallDocumento4 pagineLab6 2023 2024 Falldnthrtm3Nessuna valutazione finora
- Lecture Notes 4: Fourier Analysis: DefinitionsDocumento5 pagineLecture Notes 4: Fourier Analysis: DefinitionsIjaz TalibNessuna valutazione finora
- DSP Lecture NotesDocumento24 pagineDSP Lecture Notesvinothvin86Nessuna valutazione finora
- Slide-2.2 Discrete Time Linear Time Invariant (LTI) System-2Documento94 pagineSlide-2.2 Discrete Time Linear Time Invariant (LTI) System-2musaNessuna valutazione finora
- Department of Electrical Engineering Gcu Lahore: ExperimentDocumento12 pagineDepartment of Electrical Engineering Gcu Lahore: ExperimentAhad AliNessuna valutazione finora
- Lecture 02: Discrete Time Domain Analysis: John ChivertonDocumento41 pagineLecture 02: Discrete Time Domain Analysis: John Chivertonalexbell2k12Nessuna valutazione finora
- The Period of The Fibonacci Sequence Modulo JDocumento12 pagineThe Period of The Fibonacci Sequence Modulo JAmar dattaNessuna valutazione finora
- BT1010 Mid Semester Exam QnsDocumento1 paginaBT1010 Mid Semester Exam QnsAmar dattaNessuna valutazione finora
- Understanding The Complexity of Interpolation Search: Simon YuanDocumento7 pagineUnderstanding The Complexity of Interpolation Search: Simon YuanAmar dattaNessuna valutazione finora
- Classperio PDFDocumento29 pagineClassperio PDFAmar dattaNessuna valutazione finora
- Reactions of 2-Bromo-4-Phenylcyclohexanols With Base and Silver OxideDocumento13 pagineReactions of 2-Bromo-4-Phenylcyclohexanols With Base and Silver OxideAmar dattaNessuna valutazione finora
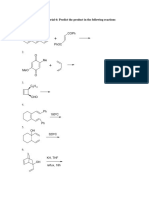
- Tutorial 4 PDFDocumento3 pagineTutorial 4 PDFAmar dattaNessuna valutazione finora
- Classperio PDFDocumento29 pagineClassperio PDFAmar dattaNessuna valutazione finora
- Department of Electrical Engineering: First Year E.T. Lab EXP. NO. - 4Documento5 pagineDepartment of Electrical Engineering: First Year E.T. Lab EXP. NO. - 4Amar dattaNessuna valutazione finora
- Application Guide: Implementation of Mx3Eg1A (Auto Synchronizer) in P40 AgileDocumento30 pagineApplication Guide: Implementation of Mx3Eg1A (Auto Synchronizer) in P40 AgileSenta ClausNessuna valutazione finora
- Moduino ENDocumento4 pagineModuino ENaabejaroNessuna valutazione finora
- Srs For Campus Recruitment SystemDocumento20 pagineSrs For Campus Recruitment SystemKshitij Bakshi100% (1)
- 876 2280 1 PBDocumento12 pagine876 2280 1 PBH4nk TechnoNessuna valutazione finora
- PM Checklist BNMDocumento3 paginePM Checklist BNMmuhammad afendyNessuna valutazione finora
- Credential Harvestor FacebookDocumento23 pagineCredential Harvestor FacebookJ Anthony GreenNessuna valutazione finora
- Vessel Database: AIS Ship PositionsDocumento3 pagineVessel Database: AIS Ship PositionsViraj SolankiNessuna valutazione finora
- Linear Programming (LPP) Transporatation Problem: Step 1: Formulate The ProblemDocumento2 pagineLinear Programming (LPP) Transporatation Problem: Step 1: Formulate The ProblemAnik GuinNessuna valutazione finora
- Free Event Planning Timeline Template DownloadDocumento5 pagineFree Event Planning Timeline Template DownloadClara NeagoeNessuna valutazione finora
- Uais Transponder Fa-100 Operator's Guide: Turning On and OffDocumento2 pagineUais Transponder Fa-100 Operator's Guide: Turning On and OffNguyen Phuoc HoNessuna valutazione finora
- PDF Android Application Development Black BookDocumento2 paginePDF Android Application Development Black Bookpushparaj SNessuna valutazione finora
- Azure Analytics Assessment QuestionnaireDocumento29 pagineAzure Analytics Assessment Questionnaireraju mahtreNessuna valutazione finora
- GFK2749 - RX3i PSM PDFDocumento100 pagineGFK2749 - RX3i PSM PDFgabsNessuna valutazione finora
- 2000 High Speed CMOS Data DL129-D c20000324Documento408 pagine2000 High Speed CMOS Data DL129-D c20000324Dara Nyara Ricardo SocorroNessuna valutazione finora
- Imp - Maximum Likelihood Estimation - STAT 414 - 415Documento8 pagineImp - Maximum Likelihood Estimation - STAT 414 - 415Sahil KaushishNessuna valutazione finora
- Aug. 13, 2020 Activity 1 by LJ Diane TuazonDocumento2 pagineAug. 13, 2020 Activity 1 by LJ Diane TuazonLj Diane TuazonNessuna valutazione finora
- Local Balloon Professional Earns Recognition As Certified Balloon ArtistDocumento2 pagineLocal Balloon Professional Earns Recognition As Certified Balloon ArtistPR.comNessuna valutazione finora
- Xmem+: External Memory Parallel Bus Expansion For Arduino / Genuino MEGA 2560 and MEGA ADKDocumento6 pagineXmem+: External Memory Parallel Bus Expansion For Arduino / Genuino MEGA 2560 and MEGA ADKعبد الله علي عمر بن قديمNessuna valutazione finora
- Valvula de Globo de MediaDocumento1 paginaValvula de Globo de MediaRobertoNessuna valutazione finora
- VD4-50kA (EN) T 1VCP000001-1206b 2Documento119 pagineVD4-50kA (EN) T 1VCP000001-1206b 2mithuruetNessuna valutazione finora
- Midterm Audcis ReviewerDocumento29 pagineMidterm Audcis Reviewerintacc recordingsNessuna valutazione finora
- Blockchain Preparation Audit ProgramDocumento7 pagineBlockchain Preparation Audit ProgramVigorNessuna valutazione finora
- DF-629 Installation Manual: 1. Accessory PartsDocumento10 pagineDF-629 Installation Manual: 1. Accessory PartsANDY BNessuna valutazione finora
- Iare Vlsi Notes 2 PDFDocumento247 pagineIare Vlsi Notes 2 PDFBhargavi JakkampudiNessuna valutazione finora
- RVT Column Internals EN WEB 20220809Documento11 pagineRVT Column Internals EN WEB 20220809Göksel VATANNessuna valutazione finora
- TVL ICT ANIMATION-NCII Q1 MODULE-2 PassedDocumento11 pagineTVL ICT ANIMATION-NCII Q1 MODULE-2 PassedBook_AinjelleNessuna valutazione finora
- Capacities (Refill) : Operation and Maintenance ManualDocumento2 pagineCapacities (Refill) : Operation and Maintenance ManualERIC ERICNessuna valutazione finora
- Arab Health 14-01-20Documento96 pagineArab Health 14-01-20Alaa AljghamiNessuna valutazione finora
- Requirement For T&C Purpose HPUniSZADocumento1 paginaRequirement For T&C Purpose HPUniSZAAwalJefriNessuna valutazione finora
- JIS B 1301-1996 - Chavetero PDFDocumento1 paginaJIS B 1301-1996 - Chavetero PDFPablo PasqualiniNessuna valutazione finora
- Generative AI: The Insights You Need from Harvard Business ReviewDa EverandGenerative AI: The Insights You Need from Harvard Business ReviewValutazione: 4.5 su 5 stelle4.5/5 (2)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveDa EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNessuna valutazione finora
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldDa EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldValutazione: 4.5 su 5 stelle4.5/5 (55)
- The Digital Mind: How Science is Redefining HumanityDa EverandThe Digital Mind: How Science is Redefining HumanityValutazione: 4.5 su 5 stelle4.5/5 (2)
- Working with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Da EverandWorking with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Valutazione: 5 su 5 stelle5/5 (5)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDa EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNessuna valutazione finora
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldDa EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldValutazione: 4.5 su 5 stelle4.5/5 (107)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceDa EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceValutazione: 5 su 5 stelle5/5 (5)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziDa Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNessuna valutazione finora
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeDa EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeValutazione: 4.5 su 5 stelle4.5/5 (69)
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideDa EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideValutazione: 5 su 5 stelle5/5 (1)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkDa EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkValutazione: 4 su 5 stelle4/5 (7)
- T-Minus AI: Humanity's Countdown to Artificial Intelligence and the New Pursuit of Global PowerDa EverandT-Minus AI: Humanity's Countdown to Artificial Intelligence and the New Pursuit of Global PowerValutazione: 4 su 5 stelle4/5 (4)
- Python Machine Learning - Third Edition: Machine Learning and Deep Learning with Python, scikit-learn, and TensorFlow 2, 3rd EditionDa EverandPython Machine Learning - Third Edition: Machine Learning and Deep Learning with Python, scikit-learn, and TensorFlow 2, 3rd EditionValutazione: 5 su 5 stelle5/5 (2)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewDa EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewValutazione: 4.5 su 5 stelle4.5/5 (104)
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsDa EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNessuna valutazione finora
- Artificial Intelligence: A Guide for Thinking HumansDa EverandArtificial Intelligence: A Guide for Thinking HumansValutazione: 4.5 su 5 stelle4.5/5 (30)
- Architects of Intelligence: The truth about AI from the people building itDa EverandArchitects of Intelligence: The truth about AI from the people building itValutazione: 4.5 su 5 stelle4.5/5 (21)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessDa EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNessuna valutazione finora
- The Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsDa EverandThe Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsNessuna valutazione finora
- Workforce 4.0: How AI, the Home Office, and the Gig Economy Are Disrupting the Status QuoDa EverandWorkforce 4.0: How AI, the Home Office, and the Gig Economy Are Disrupting the Status QuoNessuna valutazione finora
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)Da EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)Nessuna valutazione finora
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesDa EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesValutazione: 4.5 su 5 stelle4.5/5 (13)