Potrebbero piacerti anche
- Electric AccelerationDocumento8 pagineElectric Accelerationandos ndombeNessuna valutazione finora
- US8794568Documento17 pagineUS8794568雷黎明Nessuna valutazione finora
- Aircraft Performance Monitoring SystemDocumento21 pagineAircraft Performance Monitoring SystemTurk SoloNessuna valutazione finora
- Us6944575Documento49 pagineUs6944575Anonymous KiraNessuna valutazione finora
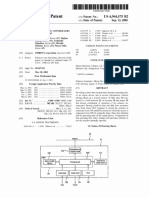
- United States Patent: (12) (10) Patent No.: US 9,043,048 B2 Manotas, Jr. (45) Date of Patent: May 26, 2015Documento9 pagineUnited States Patent: (12) (10) Patent No.: US 9,043,048 B2 Manotas, Jr. (45) Date of Patent: May 26, 2015StephenNessuna valutazione finora
- Output Control Apparatus for GeneratorDocumento15 pagineOutput Control Apparatus for GeneratorBruno LambertNessuna valutazione finora
- United States Patent: (10) Patent No.: US 6,957,339 B2Documento43 pagineUnited States Patent: (10) Patent No.: US 6,957,339 B2Alex MungaiNessuna valutazione finora
- United States Patent: (10) Patent No.: US 8,218,501 B2Documento25 pagineUnited States Patent: (10) Patent No.: US 8,218,501 B2Know-7Nessuna valutazione finora
- Us8844862 PDFDocumento11 pagineUs8844862 PDF雷黎明Nessuna valutazione finora
- Assist Maps For Different M, OdesDocumento10 pagineAssist Maps For Different M, OdessammyNessuna valutazione finora
- United States Patent: (10) Patent No.: (45) Date of PatentDocumento20 pagineUnited States Patent: (10) Patent No.: (45) Date of PatentzhenyupanNessuna valutazione finora
- United States Patent: (10) Patent No.: US 8.457,550 B2Documento24 pagineUnited States Patent: (10) Patent No.: US 8.457,550 B2charitablegrinderNessuna valutazione finora
- United States Patent (10) Patent No.: US 8,510,012 B2: Amato Et Al. (45) Date of Patent: Aug. 13, 2013Documento9 pagineUnited States Patent (10) Patent No.: US 8,510,012 B2: Amato Et Al. (45) Date of Patent: Aug. 13, 2013arstjunkNessuna valutazione finora
- United States Patent: Jung Et AlDocumento14 pagineUnited States Patent: Jung Et AlYuseuk JungNessuna valutazione finora
- Unlted States Patent (16) Patent N63 US 8,641,413 B2: Chen Et A1. (45) Date of Patent: Feb. 4, 2014Documento19 pagineUnlted States Patent (16) Patent N63 US 8,641,413 B2: Chen Et A1. (45) Date of Patent: Feb. 4, 2014weilong chenNessuna valutazione finora
- United States Patent: (10) Patent No.: US 9,131,338 B2Documento18 pagineUnited States Patent: (10) Patent No.: US 9,131,338 B2Teju AshuNessuna valutazione finora
- Direct-to-Digital Software-Defined Radar PatentDocumento13 pagineDirect-to-Digital Software-Defined Radar PatentDaniela ScobarNessuna valutazione finora
- United States Patent: (45) Date of Patent: Oct - 10, 2017Documento14 pagineUnited States Patent: (45) Date of Patent: Oct - 10, 2017thanh910Nessuna valutazione finora
- Ulllted States Patent (10) Patent N0.: US 8,498,801 B2Documento21 pagineUlllted States Patent (10) Patent N0.: US 8,498,801 B2Hartono ExcaNessuna valutazione finora
- United States Patent: (12) (10) Patent N0.: US 7,259,469 B2Documento10 pagineUnited States Patent: (12) (10) Patent N0.: US 7,259,469 B2Floyd PriceNessuna valutazione finora
- US8352121 - Patented Hitch System 2013Documento7 pagineUS8352121 - Patented Hitch System 2013MahmoudNessuna valutazione finora
- US8369905Documento32 pagineUS8369905charitablegrinderNessuna valutazione finora
- US8611813Documento19 pagineUS8611813ahpatentservicesNessuna valutazione finora
- United States Patent: (10) Patent No.: US 9,046,097 B2Documento12 pagineUnited States Patent: (10) Patent No.: US 9,046,097 B2Zavorra ZavorratoNessuna valutazione finora
- Us 7664476Documento19 pagineUs 7664476pepixx985Nessuna valutazione finora
- United States Patent (10) Patent No.: US 6,725,039 B1: Parmar Et Al. (45) Date of Patent: Apr. 20, 2004Documento7 pagineUnited States Patent (10) Patent No.: US 6,725,039 B1: Parmar Et Al. (45) Date of Patent: Apr. 20, 2004aduh haiNessuna valutazione finora
- Solar Tracking System Using Mobile RobotsDocumento25 pagineSolar Tracking System Using Mobile Robotsrizk86Nessuna valutazione finora
- United States Patent (10) Patent No.: US 7.498,769 B1Documento25 pagineUnited States Patent (10) Patent No.: US 7.498,769 B1charitablegrinderNessuna valutazione finora
- United States Patent: Korkishk0 Et Al. (45) Date of Patent: Jul. 4, 2017Documento12 pagineUnited States Patent: Korkishk0 Et Al. (45) Date of Patent: Jul. 4, 2017Jorge VazquezNessuna valutazione finora
- 2008 - US007461707B2 - Electric HDD Machine SystemDocumento12 pagine2008 - US007461707B2 - Electric HDD Machine SystemCường Nguyễn QuốcNessuna valutazione finora
- US9335793Documento23 pagineUS9335793panikmanNessuna valutazione finora
- Us8473131 PDFDocumento25 pagineUs8473131 PDFPrateek SanghiNessuna valutazione finora
- Toll Road Toll Paying Method and ApparatusDocumento26 pagineToll Road Toll Paying Method and ApparatusrdpalmaNessuna valutazione finora
- Segmented Bearing BushingDocumento12 pagineSegmented Bearing BushingAnonymous 2k25WMLY0Nessuna valutazione finora
- Us9013905 PDFDocumento23 pagineUs9013905 PDFAsistencia Técnica JLFNessuna valutazione finora
- US9212603Separate-type Rotary EngineDocumento12 pagineUS9212603Separate-type Rotary Engine임학진Nessuna valutazione finora
- Tesla Patent2 PDFDocumento26 pagineTesla Patent2 PDFatirinaNessuna valutazione finora
- US6798756Documento41 pagineUS6798756HuangNessuna valutazione finora
- Us 8955335Documento10 pagineUs 8955335John SmithNessuna valutazione finora
- United States Patent: (10) Patent No.: US 7,605,347 B2Documento20 pagineUnited States Patent: (10) Patent No.: US 7,605,347 B2Mihail AvramovNessuna valutazione finora
- Locomotive Speed Determination PatentDocumento7 pagineLocomotive Speed Determination PatentBala RajuNessuna valutazione finora
- Electric Vehicle Fault DetectionDocumento20 pagineElectric Vehicle Fault DetectionAnurag MishraNessuna valutazione finora
- United States Patent (10) Patent No.: US 9.429,629 B1Documento10 pagineUnited States Patent (10) Patent No.: US 9.429,629 B1Ajay GuptaNessuna valutazione finora
- United States Patent: Goto Et AlDocumento31 pagineUnited States Patent: Goto Et AlOscar Alejandro Cruz ArguelloNessuna valutazione finora
- US8315940Documento18 pagineUS8315940ekapusuz2004Nessuna valutazione finora
- Developer for Printing Plates Improves Quality and Reduces WasteDocumento10 pagineDeveloper for Printing Plates Improves Quality and Reduces WasteThanh Hậu TrầnNessuna valutazione finora
- United States Patent: Begeja Et Al. (10) Patent No.: US 8,698,872 B2Documento16 pagineUnited States Patent: Begeja Et Al. (10) Patent No.: US 8,698,872 B2Aan RohanahNessuna valutazione finora
- US6801420Documento27 pagineUS6801420Vansala GanesanNessuna valutazione finora
- United States Patent (10) Patent No.: US 7,948,986 B1Documento27 pagineUnited States Patent (10) Patent No.: US 7,948,986 B1Sávio MirandaNessuna valutazione finora
- US9360082Documento11 pagineUS9360082kippcamNessuna valutazione finora
- Method and Device for Simulating Slip on Vehicle Test BenchesDocumento7 pagineMethod and Device for Simulating Slip on Vehicle Test BenchesNamelezz ShadowwNessuna valutazione finora
- United States Patent: SnawerdtDocumento9 pagineUnited States Patent: SnawerdtjsholleyNessuna valutazione finora
- Automatic Signature Generation for Malicious PDF FilesDocumento19 pagineAutomatic Signature Generation for Malicious PDF FilesDiana Patricia Algeciras JaraNessuna valutazione finora
- United States Patent (10) Patent No.: US 7,781,735 B2: Gamroth Et Al. (45) Date of Patent: Aug. 24, 2010Documento6 pagineUnited States Patent (10) Patent No.: US 7,781,735 B2: Gamroth Et Al. (45) Date of Patent: Aug. 24, 2010Miguel OcampoNessuna valutazione finora
- United States Patent (10) Patent No.: US 9,002,621 B2Documento12 pagineUnited States Patent (10) Patent No.: US 9,002,621 B2Lowela AbogadieNessuna valutazione finora
- Electronic Cymbal Assembly PatentDocumento18 pagineElectronic Cymbal Assembly PatentjNessuna valutazione finora
- United States Patent: Suzuki Et AlDocumento12 pagineUnited States Patent: Suzuki Et AlFerina GuoNessuna valutazione finora
- United States Patent: (12) (10) Patent No.: US 7,541,743 B2Documento10 pagineUnited States Patent: (12) (10) Patent No.: US 7,541,743 B2rahulphadtareNessuna valutazione finora
- United States Patent: Murphy (45) Date of Patent: Aug. 5, 2014Documento15 pagineUnited States Patent: Murphy (45) Date of Patent: Aug. 5, 2014JohnNessuna valutazione finora
- Aviation Weather Services HandbookDa EverandAviation Weather Services HandbookNessuna valutazione finora
- Note On The Gini Measure For Discrete Distributions: Robert L. BasmannDocumento8 pagineNote On The Gini Measure For Discrete Distributions: Robert L. BasmannSiete SieteNessuna valutazione finora
- Cibersecurity For Industry 4.0Documento273 pagineCibersecurity For Industry 4.0antonioherediaNessuna valutazione finora
- 2019 Book IntroductionToDigitalSystemsDe PDFDocumento551 pagine2019 Book IntroductionToDigitalSystemsDe PDFSiete SieteNessuna valutazione finora
- Ti RVA DNP3 PDFDocumento42 pagineTi RVA DNP3 PDFkishordige1Nessuna valutazione finora
- 3.3V Two-Channel Analog Front End: Features DescriptionDocumento76 pagine3.3V Two-Channel Analog Front End: Features DescriptionSiete SieteNessuna valutazione finora
- Us9116787 PDFDocumento7 pagineUs9116787 PDFSiete SieteNessuna valutazione finora
- Diseñar Piano en Android StudioDocumento14 pagineDiseñar Piano en Android StudioSiete SieteNessuna valutazione finora
- Simulation of The Screening Process On A Circularly Vibrating Screen Using 3D-DeMDocumento5 pagineSimulation of The Screening Process On A Circularly Vibrating Screen Using 3D-DeMSiete SieteNessuna valutazione finora
- EMCS Technology Solutions V2Documento78 pagineEMCS Technology Solutions V2alexosi7Nessuna valutazione finora
- LNG Project Reference Snohvit Success StoryDocumento8 pagineLNG Project Reference Snohvit Success StoryKong LingweiNessuna valutazione finora
- qj341 Brochure English PDFDocumento2 pagineqj341 Brochure English PDFZaché le JusteNessuna valutazione finora
- 2TLC172001M0212 A Pluto Hardware Manual PDFDocumento56 pagine2TLC172001M0212 A Pluto Hardware Manual PDFVasanthan RajuNessuna valutazione finora
- III.4.3.1 Space Vehicle Control SystemsDocumento34 pagineIII.4.3.1 Space Vehicle Control SystemsJagadeesh BangaruNessuna valutazione finora
- Six Steps To Condition Based Maintenance - GoodDocumento3 pagineSix Steps To Condition Based Maintenance - GoodSelvaraj BalasundramNessuna valutazione finora
- CDDocumento49 pagineCDAntony SantosNessuna valutazione finora
- Space4000 PDFDocumento67 pagineSpace4000 PDFKrum Kashavarov100% (5)
- CO2 Engineering Manual-ANSULDocumento501 pagineCO2 Engineering Manual-ANSULhanlove100% (5)
- KBA Rapida 75 Basic Technical Information PDFDocumento53 pagineKBA Rapida 75 Basic Technical Information PDFMedyou83% (6)
- 2018-2019 Process Dynamic and Control (Covenant University)Documento108 pagine2018-2019 Process Dynamic and Control (Covenant University)ElijahNessuna valutazione finora
- PID ControllerDocumento17 paginePID Controllermothaffar ahmad100% (1)
- The PID Control Algorithm: How It Works, How To Tune It, and How To Use ItDocumento69 pagineThe PID Control Algorithm: How It Works, How To Tune It, and How To Use Ithamid vahedil larijaniNessuna valutazione finora
- Temperature Control ExperimentDocumento5 pagineTemperature Control ExperimentJomeNessuna valutazione finora
- MisDocumento32 pagineMisGeethika K MararNessuna valutazione finora
- (Doi 10.2118 - 39727-MS) Harmony, Kunu - (Society of Petroleum Engineers SPE Asia Pacific Conference On Integrated Modelling For Asset Management - Kuala Lumpur, MalaysDocumento13 pagine(Doi 10.2118 - 39727-MS) Harmony, Kunu - (Society of Petroleum Engineers SPE Asia Pacific Conference On Integrated Modelling For Asset Management - Kuala Lumpur, MalaysTălmaciu BiancaNessuna valutazione finora
- DECS-2100 Digital Excitation Control System: ApplicationDocumento8 pagineDECS-2100 Digital Excitation Control System: Applicationdavid_j89Nessuna valutazione finora
- MS150A Feedback AC Modular Servo SystemDocumento12 pagineMS150A Feedback AC Modular Servo SystemWaleed MuradNessuna valutazione finora
- Dynamic Modeling of Thyristor Controlled Series Capacitor in PSCAD and RTDS EnvironmentsDocumento6 pagineDynamic Modeling of Thyristor Controlled Series Capacitor in PSCAD and RTDS EnvironmentsthavaselvanNessuna valutazione finora
- User'S Manual: NB 5 - NB 9 - NB 20 Water BathsDocumento11 pagineUser'S Manual: NB 5 - NB 9 - NB 20 Water BathsRonald Rubina JustoNessuna valutazione finora
- PLC Technology TrainerDocumento15 paginePLC Technology Trainerladabd2Nessuna valutazione finora
- Raypa ID Culture Incubator - User ManualDocumento13 pagineRaypa ID Culture Incubator - User ManualPisic_FluffyNessuna valutazione finora
- Engineering in Agriculture, Environment and Food: Chao-Chin Chung, Ho-Hsien Chen, Ching-Hua TingDocumento8 pagineEngineering in Agriculture, Environment and Food: Chao-Chin Chung, Ho-Hsien Chen, Ching-Hua TingWilliam Rolando Miranda ZamoraNessuna valutazione finora
- Diesel Generator Set S Series: Specification SheetDocumento4 pagineDiesel Generator Set S Series: Specification SheetRamesh AnanthanarayananNessuna valutazione finora
- Lab ManualDocumento50 pagineLab ManualprabhueneNessuna valutazione finora
- N2 Registration Completed Students ListDocumento12 pagineN2 Registration Completed Students ListJack LawesNessuna valutazione finora
- Control System - Closed Loop Open Loop Control SystemDocumento9 pagineControl System - Closed Loop Open Loop Control SystemSiva B PositiveNessuna valutazione finora
- Robotic ArmDocumento38 pagineRobotic ArmCristina Rhain WinterNessuna valutazione finora
- Wap5 Wag9 BrakesDocumento5 pagineWap5 Wag9 BrakesChandra KanthNessuna valutazione finora