Potrebbero piacerti anche
- Home-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsDa EverandHome-made Toy Motors: A practical handbook giving detailed instructions for building simple but operative electric motorsNessuna valutazione finora
- Electromagnetic Clutches and Couplings: International Series of Monographs on Electronics and InstrumentationDa EverandElectromagnetic Clutches and Couplings: International Series of Monographs on Electronics and InstrumentationValutazione: 4 su 5 stelle4/5 (1)
- Dynamos and Electric Motors - How to Make and Run ThemDa EverandDynamos and Electric Motors - How to Make and Run ThemValutazione: 5 su 5 stelle5/5 (2)
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsDa EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNessuna valutazione finora
- A New System of Alternating Current Motors and TransformersDa EverandA New System of Alternating Current Motors and TransformersValutazione: 1 su 5 stelle1/5 (1)
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsDa EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsValutazione: 3 su 5 stelle3/5 (2)
- DIY Self Balancing One Wheel Vehicle PDFDocumento15 pagineDIY Self Balancing One Wheel Vehicle PDFjyotesh namdeoNessuna valutazione finora
- Magnetic AmplifierDocumento4 pagineMagnetic AmplifierShobha SainiNessuna valutazione finora
- Onboard Welder Using A GM Delco 140 Amp AlternatorDocumento12 pagineOnboard Welder Using A GM Delco 140 Amp AlternatorWorldRead100% (1)
- 12KW Induction HeaterDocumento8 pagine12KW Induction HeaterEric Driscoll100% (2)
- Dielectric Properties of Agricultural Materials and their ApplicationsDa EverandDielectric Properties of Agricultural Materials and their ApplicationsNessuna valutazione finora
- LASER MicrophoneDocumento8 pagineLASER MicrophoneairylainNessuna valutazione finora
- Coilgun HandgunDocumento21 pagineCoilgun HandgunjumpupdnbdjNessuna valutazione finora
- Making A T-NutDocumento8 pagineMaking A T-NutkokiskoNessuna valutazione finora
- Exp2 - DC Generators (2 Parts) (1) XXDocumento16 pagineExp2 - DC Generators (2 Parts) (1) XXLheidyy36Nessuna valutazione finora
- A Star Close Up - Building A Dirod Electrostatic GeneratorDocumento11 pagineA Star Close Up - Building A Dirod Electrostatic GeneratorTomislav JovanovicNessuna valutazione finora
- Handbook of Electronics Formulas and CalculationsDa EverandHandbook of Electronics Formulas and CalculationsNessuna valutazione finora
- Diy Transformers PDFDocumento7 pagineDiy Transformers PDFDiego García MedinaNessuna valutazione finora
- Arc Control in Circuit Breakers: Low Contact Velocity 2nd EditionDa EverandArc Control in Circuit Breakers: Low Contact Velocity 2nd EditionNessuna valutazione finora
- Car PlansDocumento11 pagineCar Planslaurlos100% (2)
- Simple Free Energie Device Module Booster ElectrolyseDocumento29 pagineSimple Free Energie Device Module Booster ElectrolyseLudovicNessuna valutazione finora
- 50 Watt Small Homemade InverterDocumento25 pagine50 Watt Small Homemade InverterMarlon CarinoNessuna valutazione finora
- Stanley Meyer Big Bobbin Builders Guide 2019 v1: Very Rare Guide for How to Assemble Water Fueled injector tri-filar bobbinDa EverandStanley Meyer Big Bobbin Builders Guide 2019 v1: Very Rare Guide for How to Assemble Water Fueled injector tri-filar bobbinNessuna valutazione finora
- Crucible Size and Surounding Space Size For Furnace - Home Model Engine MachinistDocumento4 pagineCrucible Size and Surounding Space Size For Furnace - Home Model Engine MachinistKhin Aung ShweNessuna valutazione finora
- Generator Bushing DesignsDocumento10 pagineGenerator Bushing DesignsPradeep_VashistNessuna valutazione finora
- Coil Winder Rev 3-19-11Documento17 pagineCoil Winder Rev 3-19-11dougforbes000Nessuna valutazione finora
- Contra Wound CoilsDocumento26 pagineContra Wound CoilsmiguelteixeiramaNessuna valutazione finora
- Mendocino Motor A Different Approches To Its ControlDocumento6 pagineMendocino Motor A Different Approches To Its ControlAngélica María CastrillónNessuna valutazione finora
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsDa EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsValutazione: 1 su 5 stelle1/5 (1)
- Twin Loop Treasure Seeker: Robert and David CroneDocumento5 pagineTwin Loop Treasure Seeker: Robert and David CronesafdsfdNessuna valutazione finora
- Dynamo Electric Machinery-Construction Design and Operation 1910 PDFDocumento364 pagineDynamo Electric Machinery-Construction Design and Operation 1910 PDFTiffany Grace F. Sumayao100% (1)
- Solar Charger: A Great Kit For Self-SufficiencyDocumento9 pagineSolar Charger: A Great Kit For Self-Sufficiencysekarmca89100% (1)
- 1998 AEMT Repair of Induction Motors Best Practices To Maintain Energy EfficiencyDocumento50 pagine1998 AEMT Repair of Induction Motors Best Practices To Maintain Energy EfficiencySing Yew LamNessuna valutazione finora
- 12V Car Battery Charger - Skema Rangkaian - Electronic Schematic Circuit DiagramDocumento2 pagine12V Car Battery Charger - Skema Rangkaian - Electronic Schematic Circuit DiagramfpertreusNessuna valutazione finora
- Turning A Precision WasherDocumento7 pagineTurning A Precision WasherkokiskoNessuna valutazione finora
- Home Built CNCDocumento110 pagineHome Built CNCBobby Chipping100% (4)
- High-Efficiency Series-Cell ElectrolyzerDocumento18 pagineHigh-Efficiency Series-Cell ElectrolyzerBulent Gorgulu0% (1)
- Easy Homemade 50 Watt Power Inverter UPS 12v To 220vDocumento1 paginaEasy Homemade 50 Watt Power Inverter UPS 12v To 220vPatito FeoNessuna valutazione finora
- WiFi Cantenna Without Pigtail PDFDocumento5 pagineWiFi Cantenna Without Pigtail PDFPeter FrankNessuna valutazione finora
- DCpower SuplyDocumento12 pagineDCpower Suplymm30973097Nessuna valutazione finora
- Coil WinderDocumento15 pagineCoil Winderkokomore100% (1)
- A New Unity Power Factor Quasi-Resonant Induction Heater PDFDocumento225 pagineA New Unity Power Factor Quasi-Resonant Induction Heater PDFŽarko Dačević100% (1)
- 10kW All-In-One The Hybrid Inverter User Manual: Important NoticeDocumento54 pagine10kW All-In-One The Hybrid Inverter User Manual: Important NoticeAbdulrehman SoomroNessuna valutazione finora
- 100VA To 220VA MOSFET Based Inverter Kit Circuit - Circuits DIYDocumento9 pagine100VA To 220VA MOSFET Based Inverter Kit Circuit - Circuits DIYReneNessuna valutazione finora
- Making The Keats Angle Plate From CastingsDocumento15 pagineMaking The Keats Angle Plate From CastingsJohn SmithNessuna valutazione finora
- DC GeneratorDocumento6 pagineDC GeneratorUditya K100% (1)
- How To Build A 12 VDC To 220 VAC Power Inverter (UPS)Documento14 pagineHow To Build A 12 VDC To 220 VAC Power Inverter (UPS)morfy seasNessuna valutazione finora
- Farm Engines and How to Run Them The Young Engineer's GuideDa EverandFarm Engines and How to Run Them The Young Engineer's GuideNessuna valutazione finora
- Home 2.4ghzDocumento12 pagineHome 2.4ghzjovicaradNessuna valutazione finora
- Building Recommendations EL34 Amplifier 27 Jan 2018Documento6 pagineBuilding Recommendations EL34 Amplifier 27 Jan 2018senthilnathan100% (1)
- Step-Down DC-DC Converter PDFDocumento8 pagineStep-Down DC-DC Converter PDFGenetic JohnNessuna valutazione finora
- Pulse-Width Modulated DC-DC Power ConvertersDa EverandPulse-Width Modulated DC-DC Power ConvertersNessuna valutazione finora
- Air PistolDocumento5 pagineAir Pistolgovedo1414Nessuna valutazione finora
- Electric Arc Welding and Related Studies: Electric Arc Welding & Related StudiesDa EverandElectric Arc Welding and Related Studies: Electric Arc Welding & Related StudiesNessuna valutazione finora
- What Is Alternating CurrentDocumento49 pagineWhat Is Alternating CurrentRajeev ValunjkarNessuna valutazione finora
- What Are The Speed Control Method of Induction MotorsDocumento12 pagineWhat Are The Speed Control Method of Induction MotorsRajeev ValunjkarNessuna valutazione finora
- Buddha Philosophy and Western PsychologyDocumento16 pagineBuddha Philosophy and Western PsychologyRajeev ValunjkarNessuna valutazione finora
- MEO Orals On Marine Electro Technology Function 5Documento19 pagineMEO Orals On Marine Electro Technology Function 5Rajeev ValunjkarNessuna valutazione finora
- Air Motor Selection and SizingDocumento14 pagineAir Motor Selection and SizingRajeev ValunjkarNessuna valutazione finora
- The World Is Infinitely ComplexDocumento10 pagineThe World Is Infinitely ComplexRajeev ValunjkarNessuna valutazione finora
- 10 Seires Resonance PDFDocumento19 pagine10 Seires Resonance PDFRajeev ValunjkarNessuna valutazione finora
- Safe Working Practices: Tips and Tools For Creating and Presenting Wide Format SlidesDocumento53 pagineSafe Working Practices: Tips and Tools For Creating and Presenting Wide Format SlidesRajeev ValunjkarNessuna valutazione finora
- Feeder ProtectionDocumento2 pagineFeeder ProtectionRajeev ValunjkarNessuna valutazione finora
- Marine High Voltage SystemsDocumento27 pagineMarine High Voltage SystemsRajeev Valunjkar100% (4)
- Elec9713-11 Tutorial 3 PDFDocumento2 pagineElec9713-11 Tutorial 3 PDFRajeev ValunjkarNessuna valutazione finora
- Basic Temperature Control SystemDocumento26 pagineBasic Temperature Control SystemRajeev ValunjkarNessuna valutazione finora
- Main Switch Board (MSB) Safeties, Protection and MaintenanceDocumento9 pagineMain Switch Board (MSB) Safeties, Protection and MaintenanceRajeev ValunjkarNessuna valutazione finora
- EE6504-Electrical Machines - II-306544629-Em II Unit 4Documento20 pagineEE6504-Electrical Machines - II-306544629-Em II Unit 4Rajeev ValunjkarNessuna valutazione finora
- Sr. No. Date Day Time Faculty Name: Online Lecture ScheduleDocumento2 pagineSr. No. Date Day Time Faculty Name: Online Lecture ScheduleRajeev ValunjkarNessuna valutazione finora
- Chapter 3: ThyristorsDocumento50 pagineChapter 3: ThyristorsRajeev ValunjkarNessuna valutazione finora
- Schizoid Personality DisorderDocumento4 pagineSchizoid Personality DisorderRajeev ValunjkarNessuna valutazione finora
- Relay Protection Setting For Preparing ReportDocumento12 pagineRelay Protection Setting For Preparing ReportRajeev ValunjkarNessuna valutazione finora
- L1 PDFDocumento26 pagineL1 PDFRajeev ValunjkarNessuna valutazione finora
- R. Valunjkar (Total Load: 209+120 Part-A 329) : (Old 63hrs. & New 63hrs.) 126 Hrs in 4 MonthsDocumento8 pagineR. Valunjkar (Total Load: 209+120 Part-A 329) : (Old 63hrs. & New 63hrs.) 126 Hrs in 4 MonthsRajeev ValunjkarNessuna valutazione finora
- Relay 66 49 Protection SettingDocumento5 pagineRelay 66 49 Protection SettingRajeev ValunjkarNessuna valutazione finora
- +2 Physics Unit - 4 (2m, 3m, 5m) Study Material Em-Kalviexpress PDFDocumento20 pagine+2 Physics Unit - 4 (2m, 3m, 5m) Study Material Em-Kalviexpress PDFJASMINE.ANessuna valutazione finora
- Question Bank With Answers: BE 8253 - Basic Electrical, Electronics and Instrumentation EngineeringDocumento93 pagineQuestion Bank With Answers: BE 8253 - Basic Electrical, Electronics and Instrumentation EngineeringRajeshNessuna valutazione finora
- DCM QuestionsDocumento2 pagineDCM Questionsljyandrew122122Nessuna valutazione finora
- DC Machine L05Documento16 pagineDC Machine L05luckyNessuna valutazione finora
- Synchronous Generator PART ADocumento34 pagineSynchronous Generator PART ApayalNessuna valutazione finora
- DC Rotor Assembly With Labeled Parts PDFDocumento3 pagineDC Rotor Assembly With Labeled Parts PDFsoraNessuna valutazione finora
- Permanent Magnet Motor: Instruction Manual and Experiment Guide For The PASCO Scientific Model SE-8658ADocumento34 paginePermanent Magnet Motor: Instruction Manual and Experiment Guide For The PASCO Scientific Model SE-8658AAbhijeet SinhaNessuna valutazione finora
- Motor ControlDocumento67 pagineMotor ControlJohn Christian EstrelladoNessuna valutazione finora
- Generator Testing Manual For Rotor & ExciterDocumento20 pagineGenerator Testing Manual For Rotor & ExciterRakesh KumarNessuna valutazione finora
- G631/631 Series Installation and Operation Instruction: Electrohydraulic ServovalveDocumento4 pagineG631/631 Series Installation and Operation Instruction: Electrohydraulic ServovalvenoaservicesNessuna valutazione finora
- Research Paper On DC Motor ControlDocumento8 pagineResearch Paper On DC Motor Controlfvgjcq6aNessuna valutazione finora
- Signal Reverser For Railway SignalingDocumento23 pagineSignal Reverser For Railway SignalingVikas Srivastav100% (1)
- Module 5Documento11 pagineModule 5Jan Renn ArleNessuna valutazione finora
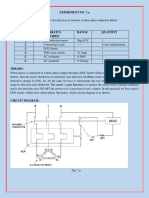
- EXPERIMENT NO 7 To Connect Start and Reverse Direction of IM and DC ShuntDocumento4 pagineEXPERIMENT NO 7 To Connect Start and Reverse Direction of IM and DC Shuntsinghsehajdeep388Nessuna valutazione finora
- R09 Set No. 2Documento8 pagineR09 Set No. 2Eu AumentadoNessuna valutazione finora
- Multiple Choice Questions DCM A SecDocumento1 paginaMultiple Choice Questions DCM A Seckanda71Nessuna valutazione finora
- Exercise On DC MachineDocumento4 pagineExercise On DC MachineHanan ShayiboNessuna valutazione finora
- Mechatronics: Electrical Actuation SystemsDocumento32 pagineMechatronics: Electrical Actuation SystemsKARTHIK S SNessuna valutazione finora
- Handout 3 Types of DC GeneratorsDocumento11 pagineHandout 3 Types of DC GeneratorsAdriel JohnNessuna valutazione finora
- FEM Based Design and Performance Analysis of 2-Poles Universal MotorDocumento15 pagineFEM Based Design and Performance Analysis of 2-Poles Universal MotorBalaji DDNessuna valutazione finora
- DC Motors: SEE 3433 Electrical MachinesDocumento24 pagineDC Motors: SEE 3433 Electrical MachinesmahirahmuslihahNessuna valutazione finora
- DC Motor Characteristic-1Documento12 pagineDC Motor Characteristic-1Maysara BalakiNessuna valutazione finora
- Seminar Report On Electric RelayDocumento37 pagineSeminar Report On Electric RelayArvind Singh KasanaNessuna valutazione finora
- PDFDocumento44 paginePDFPeru IllaNessuna valutazione finora
- Industrial Motor ControlDocumento12 pagineIndustrial Motor Controlganesh madhav kendreNessuna valutazione finora
- Dronacharya CLG. of ENG IMSM LAB Manual-Pages-13-15Documento3 pagineDronacharya CLG. of ENG IMSM LAB Manual-Pages-13-15Leela Krishna MNessuna valutazione finora
- Acml 01 eDocumento1 paginaAcml 01 eOsramNessuna valutazione finora
- 45 16255 EE321 2015 1 1 1 Week 9 10Documento22 pagine45 16255 EE321 2015 1 1 1 Week 9 10Zakaria MaazazNessuna valutazione finora
- AC & DC WindingDocumento29 pagineAC & DC WindingAtiq Daultana50% (4)
- Chapter 4 DET50063 - BRAKING OF DC MOTORDocumento21 pagineChapter 4 DET50063 - BRAKING OF DC MOTORFara FaraNessuna valutazione finora