Potrebbero piacerti anche
- Debt & Money MarketsDocumento5 pagineDebt & Money MarketsMohanNessuna valutazione finora
- Assignment 6Documento2 pagineAssignment 6MohanNessuna valutazione finora
- Group 1 - Ping An CaseDocumento5 pagineGroup 1 - Ping An CaseMohanNessuna valutazione finora
- Mohan ReDocumento1 paginaMohan ReMohanNessuna valutazione finora
- Report2 1 PDFDocumento1 paginaReport2 1 PDFMohanNessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- IP Multcast Juniper PDFDocumento2.235 pagineIP Multcast Juniper PDFTrần Hoàng ThôngNessuna valutazione finora
- Voluson S10 - Brochure (En) 2Documento2 pagineVoluson S10 - Brochure (En) 2Zákány ZoltánNessuna valutazione finora
- Ajp MP 2Documento15 pagineAjp MP 2LalitNessuna valutazione finora
- ANL252 SU2 Jul2022Documento52 pagineANL252 SU2 Jul2022EbadNessuna valutazione finora
- Green ComputingDocumento7 pagineGreen Computingerwin.dee.cicsNessuna valutazione finora
- Am - Is - Are - Was - Were WorksheetDocumento1 paginaAm - Is - Are - Was - Were WorksheetВалентин КечкоNessuna valutazione finora
- 4th MiningDocumento18 pagine4th MiningPrince SinghNessuna valutazione finora
- Operation and Maintenance Deutz Engine 1015 English - 4775387 - 01Documento62 pagineOperation and Maintenance Deutz Engine 1015 English - 4775387 - 01antonio lopez lopez0% (1)
- Commercial Invoice: Hikvision Panama Commercial, S.ADocumento1 paginaCommercial Invoice: Hikvision Panama Commercial, S.AUzzielNessuna valutazione finora
- Voucher WIFI ZONE Deux Heures Up 671 07.01.21Documento5 pagineVoucher WIFI ZONE Deux Heures Up 671 07.01.21kodjo ELOMNessuna valutazione finora
- Manual (As of 31/10/2020)Documento5 pagineManual (As of 31/10/2020)Turtle GamesNessuna valutazione finora
- Prueba de ConfirmacionDocumento4 paginePrueba de ConfirmacionLuis Fernando deoleo FurcalNessuna valutazione finora
- Catalogo CGM.3Documento44 pagineCatalogo CGM.3Rui Miguel Viegas CardosoNessuna valutazione finora
- CRM S1 MergedDocumento352 pagineCRM S1 Mergedspam ashishNessuna valutazione finora
- Katana Librarian - Frequently Asked QuestionsDocumento12 pagineKatana Librarian - Frequently Asked QuestionsLuki KurniawanNessuna valutazione finora
- Unit Progress Test 3 - Version BDocumento12 pagineUnit Progress Test 3 - Version BluisNessuna valutazione finora
- Decision Trees Classification: Mustafa JarrarDocumento46 pagineDecision Trees Classification: Mustafa Jarrarrferreira85Nessuna valutazione finora
- "Title": Design and Fabrication of Bluetooth Controlled Robotic Cleaning MachineDocumento26 pagine"Title": Design and Fabrication of Bluetooth Controlled Robotic Cleaning MachineSrushti KatkarNessuna valutazione finora
- ARDUINODocumento28 pagineARDUINOAshmad Syed100% (1)
- April Fool's DayDocumento4 pagineApril Fool's DayRobertKienerNessuna valutazione finora
- Earning and Stock Split - Asquith Et Al 1989Documento18 pagineEarning and Stock Split - Asquith Et Al 1989Fransiskus ShaulimNessuna valutazione finora
- Tnteu-Icssr Paper List 803Documento803 pagineTnteu-Icssr Paper List 803shahidafzalsyedNessuna valutazione finora
- DF-629 Installation Manual: 1. Accessory PartsDocumento10 pagineDF-629 Installation Manual: 1. Accessory PartsANDY BNessuna valutazione finora
- A Report On Fee Management Project Class 12Documento11 pagineA Report On Fee Management Project Class 12Atul DybeyNessuna valutazione finora
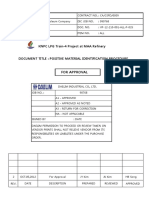
- KNPC LPG Train-4 Project at MAA Refinery: For ApprovalDocumento8 pagineKNPC LPG Train-4 Project at MAA Refinery: For ApprovalNeelam AhmadNessuna valutazione finora
- Compressor Crankcase Breather: Service BulletinDocumento2 pagineCompressor Crankcase Breather: Service BulletinAlexander MugabeNessuna valutazione finora
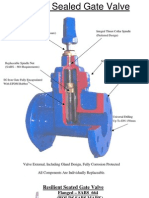
- Resilient Sealed Gate Valve: Leadership in Product DesignsDocumento2 pagineResilient Sealed Gate Valve: Leadership in Product DesignspeetholNessuna valutazione finora
- CDS VAM TOP ® 3.5in. 9.2lb-ft L80 Type 1 API Drift 2.867in. 87.5%Documento1 paginaCDS VAM TOP ® 3.5in. 9.2lb-ft L80 Type 1 API Drift 2.867in. 87.5%anon_798581734100% (1)
- TeM-9007 enDocumento238 pagineTeM-9007 eneugeniuciobanu100% (3)
- 01 DPC 2802 - DatasheetDocumento2 pagine01 DPC 2802 - DatasheetJusril HidayatNessuna valutazione finora