Potrebbero piacerti anche
- Metodología de Trabajo Con Las Niñas y Niños Preescolares - Leonor CerdaDocumento260 pagineMetodología de Trabajo Con Las Niñas y Niños Preescolares - Leonor Cerdakamipipo100% (4)
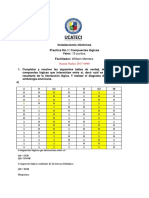
- Ejercicios para Practicar KarnaughDocumento3 pagineEjercicios para Practicar KarnaughFREDERICKESCOBARNessuna valutazione finora
- Cálculo y diseño de estructuras de materiales compuestos de fibra de vidrioDa EverandCálculo y diseño de estructuras de materiales compuestos de fibra de vidrioNessuna valutazione finora
- Centro de Origen ChinoDocumento8 pagineCentro de Origen ChinoRebeca GonzalesmendietaNessuna valutazione finora
- Practica 7 Electricidad Fes AragonDocumento8 paginePractica 7 Electricidad Fes AragonOmar Aceves100% (1)
- Trabajo N01 CINTHIA VILLACORTA ROQUEDocumento9 pagineTrabajo N01 CINTHIA VILLACORTA ROQUEVR CinthiaNessuna valutazione finora
- Preparatorio 6 - Juan VásquezDocumento5 paginePreparatorio 6 - Juan VásquezJuan Francisco Vásquez RuizNessuna valutazione finora
- Solucionario Problemas Electronica Digital Mux DecoDocumento6 pagineSolucionario Problemas Electronica Digital Mux DecoJhoan JoaquiNessuna valutazione finora
- 8 Bit A BCDDocumento6 pagine8 Bit A BCDDaniel OsoNessuna valutazione finora
- Sistemas Digitales Episunsa PDFDocumento7 pagineSistemas Digitales Episunsa PDFHugo WongNessuna valutazione finora
- Lab. 3 SistemasDocumento15 pagineLab. 3 SistemasJuan Esteban Pabón GómezNessuna valutazione finora
- P2 ResueltaDocumento15 pagineP2 ResueltaJaime Mauricio Cruz CastañedaNessuna valutazione finora
- Controladores Logicos Programables PLC Actividad3Documento5 pagineControladores Logicos Programables PLC Actividad3jairo barrios100% (1)
- Trabajo 2 de Diseño DigitalDocumento4 pagineTrabajo 2 de Diseño DigitalJP MercadoNessuna valutazione finora
- Ejercicios Unidad 5 DigitalDocumento10 pagineEjercicios Unidad 5 DigitalIsrael HPNessuna valutazione finora
- Traba 5 FDocumento10 pagineTraba 5 FYean Guere LavadoNessuna valutazione finora
- LaboratorioN°04 Micronano Guerrero Cueva AngelDocumento16 pagineLaboratorioN°04 Micronano Guerrero Cueva AngelAngelGuerreroNessuna valutazione finora
- Hardware A-4Documento6 pagineHardware A-4Wilbert AybarNessuna valutazione finora
- Actividad 4 Sena Saza 11Documento7 pagineActividad 4 Sena Saza 11maicol esteban rojas pinedaNessuna valutazione finora
- Archivo Actividad - 12 - LPL - CPSDocumento21 pagineArchivo Actividad - 12 - LPL - CPSPonce Leon LeonardoNessuna valutazione finora
- Laboratorio 06 - GrupalDocumento33 pagineLaboratorio 06 - GrupalRaul Depaz NuñezNessuna valutazione finora
- Parcial Sis Digi Kevin LopezDocumento6 pagineParcial Sis Digi Kevin LopezKevin LópezNessuna valutazione finora
- Tres Salidas PDFDocumento5 pagineTres Salidas PDFMariaNessuna valutazione finora
- Martha y Beyri-MdDocumento11 pagineMartha y Beyri-MdMartha Elizabeth Maldonado CalderonNessuna valutazione finora
- Laboratorio I Sistemas DigitalesDocumento5 pagineLaboratorio I Sistemas DigitalesCristian Camilo Urrego RojasNessuna valutazione finora
- Parcial Arquitectura de Computadores I Camilo Mahecha BadillodocxDocumento3 pagineParcial Arquitectura de Computadores I Camilo Mahecha BadillodocxStefania ReyesNessuna valutazione finora
- Practica3 SDDocumento3 paginePractica3 SDDaniel CalderonNessuna valutazione finora
- Ejercicio 1 Lenguaje EscaleraDocumento6 pagineEjercicio 1 Lenguaje EscaleraRaul Omar Valenzuela De La RosaNessuna valutazione finora
- Practica 5 Diseño DiseñoDocumento4 paginePractica 5 Diseño DiseñoAnonymous xQzIwQDpcYNessuna valutazione finora
- INFORME PREVIO 8 - SISTEMAS DIGITALES - Ramirez Rodriguez CarloDocumento19 pagineINFORME PREVIO 8 - SISTEMAS DIGITALES - Ramirez Rodriguez CarloCarlo RamirezNessuna valutazione finora
- Actividad Semana 3 - PLC-SENADocumento2 pagineActividad Semana 3 - PLC-SENAIsella Torres100% (2)
- Act4.2 Problemario YEtsiDocumento5 pagineAct4.2 Problemario YEtsiClaudio De Jesus EspindolaNessuna valutazione finora
- Algebra de BoolDocumento5 pagineAlgebra de BoolJose Daniel Rojas EcheverriNessuna valutazione finora
- Tarea - Clase 4 - S1Documento2 pagineTarea - Clase 4 - S1Jimmy Cruz (Jimmy Cruz bernita)Nessuna valutazione finora
- Laboratorio 2 Sistemas DigitalesDocumento4 pagineLaboratorio 2 Sistemas DigitalesJuan Camilo Holguín ZuluagaNessuna valutazione finora
- Preinforme #7Documento12 paginePreinforme #7Boris SanhuezaNessuna valutazione finora
- Practica No.1 Compuertas Logicas Pedro Sánchez 2018-1191Documento5 paginePractica No.1 Compuertas Logicas Pedro Sánchez 2018-1191Alberto LopezNessuna valutazione finora
- Tarea Numero 4 de MatematicasDocumento3 pagineTarea Numero 4 de MatematicasDaniel CarchiNessuna valutazione finora
- Actividad de Aprendizaje 1: Identificar Los Diagramas Básicos en Lenguajes deDocumento4 pagineActividad de Aprendizaje 1: Identificar Los Diagramas Básicos en Lenguajes deGustavo Otalora0% (1)
- Sumador CompletoDocumento2 pagineSumador CompletoErickValladaresNessuna valutazione finora
- Laboratorio 2 de Sistemas Digitales 1 UNIDocumento5 pagineLaboratorio 2 de Sistemas Digitales 1 UNIDaniel Zavala100% (1)
- Problemas de Lógica Combinacional 1Documento1 paginaProblemas de Lógica Combinacional 1JeffersonMejiaNessuna valutazione finora
- Ejercicios Primera FaseDocumento10 pagineEjercicios Primera FaseRenato Beltran CaceresNessuna valutazione finora
- Tarea 3 - Ejercicio 2Documento9 pagineTarea 3 - Ejercicio 2George MoreloNessuna valutazione finora
- Diagrama de ContactoDocumento4 pagineDiagrama de ContactoAlexander maestre torresNessuna valutazione finora
- Practica No.1 Compuertas LogicasDocumento7 paginePractica No.1 Compuertas Logicasnaomi nunezNessuna valutazione finora
- Digitales SESION IDocumento4 pagineDigitales SESION Iu20211199220Nessuna valutazione finora
- GuiadeAprendizaje 1evidencia 2Documento3 pagineGuiadeAprendizaje 1evidencia 2JENNY FERNANDA MESA ALVAREZNessuna valutazione finora
- Diseño Digital Actividad 3Documento5 pagineDiseño Digital Actividad 3ALfredo PNessuna valutazione finora
- Unidad 1. Actividad 1.Documento2 pagineUnidad 1. Actividad 1.Juan AlmonteNessuna valutazione finora
- Criterios de EstabilidadDocumento3 pagineCriterios de EstabilidadSebasNessuna valutazione finora
- Actividad 2 Semana 1 PLCDocumento3 pagineActividad 2 Semana 1 PLCCamilo Ardila0% (2)
- Actividad 1 Entrega 2Documento2 pagineActividad 1 Entrega 2brianr0719Nessuna valutazione finora
- Informe Desarrollar Diagramas de Contactos en Los PLCDocumento4 pagineInforme Desarrollar Diagramas de Contactos en Los PLCdialcaveNessuna valutazione finora
- Practica 1 ParcialDocumento7 paginePractica 1 ParcialCesar Calle LimachiNessuna valutazione finora
- VF TCI202 Actividadsolucionada Semana 4Documento1 paginaVF TCI202 Actividadsolucionada Semana 4diego BuguenoNessuna valutazione finora
- Informe 3 Circuitos Digitales PDFDocumento5 pagineInforme 3 Circuitos Digitales PDFJorge AntonioNessuna valutazione finora
- Solonch PDFDocumento2 pagineSolonch PDFAnonymous vm4jsZXNessuna valutazione finora
- Trabajo 1 Desarrollar Diagramas de Contactos en Los PLCDocumento3 pagineTrabajo 1 Desarrollar Diagramas de Contactos en Los PLCJuan PerezNessuna valutazione finora
- Informe 3 MicroelectronicaDocumento14 pagineInforme 3 MicroelectronicaMary Alarcon PalominoNessuna valutazione finora
- Curso Virtual Controladores Lógicos Programables PLC I-Actividad 3Documento5 pagineCurso Virtual Controladores Lógicos Programables PLC I-Actividad 3Jhonson SalazarNessuna valutazione finora
- Mapas de KarnaughDocumento7 pagineMapas de KarnaughCarlos Mauro Ferrer RiquettNessuna valutazione finora
- Compensador PIDDocumento9 pagineCompensador PIDÁngela María Moncaleano AndradeNessuna valutazione finora
- Taller 1 Estadística Descriptiva RLGDocumento4 pagineTaller 1 Estadística Descriptiva RLGÁngela María Moncaleano AndradeNessuna valutazione finora
- Diagrama de Estados SemaforoDocumento4 pagineDiagrama de Estados SemaforoÁngela María Moncaleano AndradeNessuna valutazione finora
- Informe PotenciaDocumento14 pagineInforme PotenciaÁngela María Moncaleano AndradeNessuna valutazione finora
- Cuarta Encuesta Sobre Consumo Drogas EL SALVADOR 2018 (ISBN)Documento146 pagineCuarta Encuesta Sobre Consumo Drogas EL SALVADOR 2018 (ISBN)Richard RiccioNessuna valutazione finora
- Historia Del JazzDocumento2 pagineHistoria Del JazzRóger Édgard Antón FabiánNessuna valutazione finora
- Apuntes Diseño de Plantas IDocumento7 pagineApuntes Diseño de Plantas ImiguelNessuna valutazione finora
- Ejemplo de Bitacora Motoconformadora Champion 726ADocumento3 pagineEjemplo de Bitacora Motoconformadora Champion 726AUriiel E. Zamudiio RmzzNessuna valutazione finora
- GasgunDocumento2 pagineGasgunnevis poloNessuna valutazione finora
- 2 MruDocumento5 pagine2 MruMamerto CalizayaNessuna valutazione finora
- Trabajo de Aplicacion - Enka de ColombiaDocumento20 pagineTrabajo de Aplicacion - Enka de ColombiaJulianaNessuna valutazione finora
- Sem 10 ReproduccionDocumento7 pagineSem 10 ReproduccionPanchitoPQ21Nessuna valutazione finora
- 6 Img Sat GOES R Nueva GeneracDocumento88 pagine6 Img Sat GOES R Nueva GeneracDardo Melgar RocaNessuna valutazione finora
- Yac. de GasDocumento4 pagineYac. de GasmariangelaNessuna valutazione finora
- Guia 4 Razones Trigonometricas de Angulos AgudosDocumento6 pagineGuia 4 Razones Trigonometricas de Angulos AgudosfjavierschNessuna valutazione finora
- Un Montón de Imágenes RotasDocumento3 pagineUn Montón de Imágenes RotasClaudia MammanaNessuna valutazione finora
- 1-Estudios de Suelos y Cimentaciones Salon SocialDocumento58 pagine1-Estudios de Suelos y Cimentaciones Salon SocialFederico AriasNessuna valutazione finora
- Act-3 Evaluación de La DistanciaDocumento12 pagineAct-3 Evaluación de La DistanciafuamencioNessuna valutazione finora
- Exorcismo Largo Del Arcangel MiguelDocumento3 pagineExorcismo Largo Del Arcangel MiguelAlan Indomenico100% (1)
- Trabajo de BiologiaDocumento17 pagineTrabajo de BiologiaamadorNessuna valutazione finora
- N° Especie Nombre Científico Peso (KG) %: 1 Ishpingo Amburana Cearensis 81747.76 1% 2 Tahuarí Anthodiscus Pilosus 5060 0%Documento4 pagineN° Especie Nombre Científico Peso (KG) %: 1 Ishpingo Amburana Cearensis 81747.76 1% 2 Tahuarí Anthodiscus Pilosus 5060 0%LeslyeBautistaNessuna valutazione finora
- FormatoDocumento8 pagineFormatoxionforteNessuna valutazione finora
- Control Genético de La Síntesis Proteica - FisiologíaDocumento20 pagineControl Genético de La Síntesis Proteica - Fisiologíaisaily fernándezNessuna valutazione finora
- Salud Oral Durante El EmbarazoDocumento26 pagineSalud Oral Durante El EmbarazolauraNessuna valutazione finora
- Guia para La Practica - GlicemiaDocumento4 pagineGuia para La Practica - GlicemiaOLGA RUTH CALIZAYA COPANessuna valutazione finora
- Una Verdad Incomoda Ficha de TrabajoDocumento2 pagineUna Verdad Incomoda Ficha de TrabajoFrancisco Zarandieta MoranNessuna valutazione finora
- Producción Limpia Sector Pesquero - Def PDFDocumento34 pagineProducción Limpia Sector Pesquero - Def PDFAngela Vargas PocohuancaNessuna valutazione finora
- Dos Diarios TripaDocumento85 pagineDos Diarios TripaforgnoneNessuna valutazione finora
- M002CIRC DE POTENCIA 1de2 MANUAL DEL ESTUDIANTE 25986Documento99 pagineM002CIRC DE POTENCIA 1de2 MANUAL DEL ESTUDIANTE 25986angeldelaperdicion768Nessuna valutazione finora
- 3 Clase Dr. Calero - Seguridad y Eficacia de Vacunas Contra COVID-19Documento30 pagine3 Clase Dr. Calero - Seguridad y Eficacia de Vacunas Contra COVID-19Laura Garay FloresNessuna valutazione finora
- Memoria Proyecto Básico de Ejecución de Una Vivienda Unifamiliar (Incluye Calculos)Documento40 pagineMemoria Proyecto Básico de Ejecución de Una Vivienda Unifamiliar (Incluye Calculos)MatiasPGNessuna valutazione finora