Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Drawing Support Temporary Center ColumnDocumento1 paginaDrawing Support Temporary Center Columnelang purbayaNessuna valutazione finora
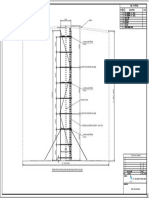
- Tower Pipa ScaffoldingDocumento1 paginaTower Pipa Scaffoldingelang purbayaNessuna valutazione finora
- Lemari Partisi-ModelDocumento1 paginaLemari Partisi-Modelelang purbayaNessuna valutazione finora
- Temporary Support Gondola Rail PDFDocumento1 paginaTemporary Support Gondola Rail PDFelang purbayaNessuna valutazione finora
- ConversionDocumento7 pagineConversionelang purbayaNessuna valutazione finora
- Temporary Support Gondola Rail PDFDocumento1 paginaTemporary Support Gondola Rail PDFelang purbayaNessuna valutazione finora
- ConversionDocumento7 pagineConversionelang purbayaNessuna valutazione finora
- Lampiran PDFDocumento1 paginaLampiran PDFelang purbayaNessuna valutazione finora
- Roof SupportDocumento1 paginaRoof Supportelang purbayaNessuna valutazione finora
- Calculation Lifting LugDocumento4 pagineCalculation Lifting Lugelang purbayaNessuna valutazione finora
- Center DrummmDocumento1 paginaCenter Drummmelang purbayaNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Online Dynamic Security Assessment of Wind Integrated Power System UsingDocumento9 pagineOnline Dynamic Security Assessment of Wind Integrated Power System UsingRizwan Ul HassanNessuna valutazione finora
- Ch.1 Essential Concepts: 1.1 What and How? What Is Heat Transfer?Documento151 pagineCh.1 Essential Concepts: 1.1 What and How? What Is Heat Transfer?samuel KwonNessuna valutazione finora
- 01 IntroductionDocumento15 pagine01 IntroductionAli FarhatNessuna valutazione finora
- WallthicknessDocumento1 paginaWallthicknessGabriela MotaNessuna valutazione finora
- Bearing TypesDocumento5 pagineBearing TypesWayuNessuna valutazione finora
- Effect of Heater Geometry On The High Temperature Distribution On A MEMS Micro-HotplateDocumento6 pagineEffect of Heater Geometry On The High Temperature Distribution On A MEMS Micro-HotplateJorge GuerreroNessuna valutazione finora
- Help SIMARIS Project 3.1 enDocumento61 pagineHelp SIMARIS Project 3.1 enVictor VignolaNessuna valutazione finora
- FhryhfhfhDocumento3 pagineFhryhfhfhAffan AhmadNessuna valutazione finora
- Sim Educ101Documento101 pagineSim Educ101Rolando AmadNessuna valutazione finora
- FS-C8025MFP Release NotesDocumento22 pagineFS-C8025MFP Release NotesFirmware SM-SHNessuna valutazione finora
- EE 8602 - Protection and Switchgear Unit I - MCQ BankDocumento11 pagineEE 8602 - Protection and Switchgear Unit I - MCQ Bankpoonam yadavNessuna valutazione finora
- AIF User Guide PDFDocumento631 pagineAIF User Guide PDFÖzgün Alkın ŞensoyNessuna valutazione finora
- High Performance Vector Control SE2 Series InverterDocumento9 pagineHigh Performance Vector Control SE2 Series InverterhanazahrNessuna valutazione finora
- Tensile Strength of Ferro Cement With Respect To Specific SurfaceDocumento3 pagineTensile Strength of Ferro Cement With Respect To Specific SurfaceheminNessuna valutazione finora
- 2014 Abidetal. TheoreticalPerspectiveofCorporateGovernance BulletinofBusinessDocumento11 pagine2014 Abidetal. TheoreticalPerspectiveofCorporateGovernance BulletinofBusinessOne PlusNessuna valutazione finora
- Feasibility and Optimization of Dissimilar Laser Welding ComponentsDocumento366 pagineFeasibility and Optimization of Dissimilar Laser Welding Componentskaliappan45490Nessuna valutazione finora
- Bug Life Cycle in Software TestingDocumento2 pagineBug Life Cycle in Software TestingDhirajNessuna valutazione finora
- DICKSON KT800/802/803/804/856: Getting StartedDocumento6 pagineDICKSON KT800/802/803/804/856: Getting StartedkmpoulosNessuna valutazione finora
- LITERARY THEORY BY TERRY EAGLETON NotesDocumento6 pagineLITERARY THEORY BY TERRY EAGLETON NotesPrachi SharmaNessuna valutazione finora
- All Papers of Thermodyanmics and Heat TransferDocumento19 pagineAll Papers of Thermodyanmics and Heat TransfervismayluhadiyaNessuna valutazione finora
- 13 SK Kader Pendamping PGSDocumento61 pagine13 SK Kader Pendamping PGSrachman ramadhanaNessuna valutazione finora
- BS7430 Earthing CalculationDocumento14 pagineBS7430 Earthing CalculationgyanNessuna valutazione finora
- S010T1Documento1 paginaS010T1DUCNessuna valutazione finora
- The Theory of Production and Cost: Chapter FourDocumento32 pagineThe Theory of Production and Cost: Chapter FourOromay Elias100% (1)
- WAM ES Screw Conveyors Manual JECDocumento43 pagineWAM ES Screw Conveyors Manual JECabbas tawbiNessuna valutazione finora
- A12 CanSat Technlology Forclimate Monitoring PDFDocumento10 pagineA12 CanSat Technlology Forclimate Monitoring PDFDany PABON VILLAMIZARNessuna valutazione finora
- DSynchronize (ENG)Documento3 pagineDSynchronize (ENG)Rekha Rajarajan100% (1)
- Jazz PrepaidDocumento4 pagineJazz PrepaidHoney BunnyNessuna valutazione finora
- Advanced Work Packaging: A Fit For Purpose ApproachDocumento17 pagineAdvanced Work Packaging: A Fit For Purpose Approachhafidz bandungNessuna valutazione finora
- Group 2 - BSCE1 3 - Formal Lab Report#6 - CET 0122.1 11 2Documento5 pagineGroup 2 - BSCE1 3 - Formal Lab Report#6 - CET 0122.1 11 2John Eazer FranciscoNessuna valutazione finora