Potrebbero piacerti anche
- Matriz de Riesgos ElectricosDocumento9 pagineMatriz de Riesgos ElectricosClaudia Melgarejo73% (22)
- Lista de Normas ASMEDocumento12 pagineLista de Normas ASMECarlos Rafael Uriarte Vasquez83% (12)
- Procedimiento para Izar y Abatir Un MastilDocumento2 pagineProcedimiento para Izar y Abatir Un MastilDiana RiveroNessuna valutazione finora
- Manual Martillo Atlas Copco 2200-7000 - 3390500505Documento52 pagineManual Martillo Atlas Copco 2200-7000 - 3390500505Miguel Bustamante100% (2)
- ParafinasDocumento25 pagineParafinasNoelia Alcocer Rodriguez100% (1)
- Trabajo de Investigacion de Valvulas TerminadoDocumento7 pagineTrabajo de Investigacion de Valvulas TerminadoNoelia Alcocer RodriguezNessuna valutazione finora
- Perforadora ManualDocumento183 paginePerforadora ManualJose Antonio VillalobosNessuna valutazione finora
- Tratamiento Del Petroleo CrudoDocumento8 pagineTratamiento Del Petroleo CrudoNoelia Alcocer RodriguezNessuna valutazione finora
- Diseño y Construcción de Un Molino de Martillos Triturador de Granos para Granjas AvícolasDocumento11 pagineDiseño y Construcción de Un Molino de Martillos Triturador de Granos para Granjas AvícolasGiulianna RivaNessuna valutazione finora
- Informe de Los Equipos de Control de SolidosDocumento13 pagineInforme de Los Equipos de Control de SolidosNoelia Alcocer Rodriguez0% (1)
- Construccion de DuctosDocumento5 pagineConstruccion de DuctosNoelia Alcocer RodriguezNessuna valutazione finora
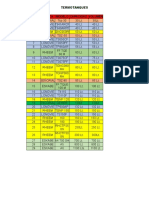
- Trabajo de Termotanques IDocumento9 pagineTrabajo de Termotanques INoelia Alcocer RodriguezNessuna valutazione finora
- Practica 2 - InstrumentacionDocumento8 paginePractica 2 - InstrumentacionNoelia Alcocer RodriguezNessuna valutazione finora
- Pozo San AlbertoDocumento5 paginePozo San AlbertoNoelia Alcocer RodriguezNessuna valutazione finora
- Proceso ICIDocumento2 pagineProceso ICINoelia Alcocer RodriguezNessuna valutazione finora
- Campo SurubiDocumento1 paginaCampo SurubiNoelia Alcocer Rodriguez100% (2)
- Exposicion de Mek-Tolueno - Refinacion PetroleraDocumento31 pagineExposicion de Mek-Tolueno - Refinacion PetroleraNoelia Alcocer RodriguezNessuna valutazione finora
- DEPARAFINADA POR MEK RefinacionDocumento41 pagineDEPARAFINADA POR MEK RefinacionNoelia Alcocer RodriguezNessuna valutazione finora
- Geologia EstructuralDocumento4 pagineGeologia EstructuralNoelia Alcocer RodriguezNessuna valutazione finora
- Arte Precolombino en BoliviaDocumento3 pagineArte Precolombino en BoliviaFranz Ever Quispe Mollo56% (18)
- Contenido de Solidos y Liquidos LaboratorioDocumento4 pagineContenido de Solidos y Liquidos LaboratorioNoelia Alcocer RodriguezNessuna valutazione finora
- Pozos y Plantas de Gas en BoliviaDocumento8 paginePozos y Plantas de Gas en BoliviaNoelia Alcocer RodriguezNessuna valutazione finora
- Equipos de Laboratorio 1Documento13 pagineEquipos de Laboratorio 1Noelia Alcocer RodriguezNessuna valutazione finora
- Equipos de LaboratorioDocumento12 pagineEquipos de LaboratorioNoelia Alcocer RodriguezNessuna valutazione finora
- Que Es La PetroquimicaDocumento9 pagineQue Es La PetroquimicaNoelia Alcocer RodriguezNessuna valutazione finora
- Presiones de Surgencia y PistoneoDocumento7 paginePresiones de Surgencia y PistoneoNoelia Alcocer Rodriguez100% (1)
- Vacío IIDocumento17 pagineVacío IINoelia Alcocer RodriguezNessuna valutazione finora
- 4° Lab RetortaDocumento13 pagine4° Lab RetortaNoelia Alcocer RodriguezNessuna valutazione finora
- La Importancia de La InformáticaDocumento3 pagineLa Importancia de La InformáticaCHRISTIAN HUAMAN100% (1)
- Pueblos Nómadas y Sedentarios VELOCIDAD LECTORADocumento3 paginePueblos Nómadas y Sedentarios VELOCIDAD LECTORAmaria joseNessuna valutazione finora
- P.E.T. Instalación de Cobertura en TechoDocumento4 pagineP.E.T. Instalación de Cobertura en TechoAllison CRNessuna valutazione finora
- Arbol de Levas Magnum E-TechDocumento10 pagineArbol de Levas Magnum E-TechDavid Diaz-Perona RomeroNessuna valutazione finora
- PR-051078-22 - Montaje de Vulcanita y EmpastadoDocumento13 paginePR-051078-22 - Montaje de Vulcanita y EmpastadoEstrelladelsur Encantada EncantadaNessuna valutazione finora
- Derecho A Saber ElectricistaDocumento7 pagineDerecho A Saber ElectricistaCarlos RivasNessuna valutazione finora
- Inspeccion de Herramientas MenoresDocumento2 pagineInspeccion de Herramientas MenoresEliana Paola HernandezNessuna valutazione finora
- 01 Cartilla de Inducción en Prevención de Riesgos Martillo-KangoDocumento2 pagine01 Cartilla de Inducción en Prevención de Riesgos Martillo-KangoJavier Ignacio Bastias QuirozNessuna valutazione finora
- Artefacto, InstrumentoDocumento2 pagineArtefacto, InstrumentoNestor FaridNessuna valutazione finora
- Herramientas de TrabajoDocumento6 pagineHerramientas de TrabajoCualquiera InventaNessuna valutazione finora
- Portafolio Mantenimiento y Reparacion PDFDocumento39 paginePortafolio Mantenimiento y Reparacion PDFDenis Anderson Tinoco GonzalezNessuna valutazione finora
- Empleado de Carniceria JubilacionDocumento25 pagineEmpleado de Carniceria Jubilacionpdr20Nessuna valutazione finora
- Sierra Caladora: Manual de InstruccionesDocumento16 pagineSierra Caladora: Manual de InstruccionesCaterine Hurtado100% (1)
- Copia de Matriz - Riesgos - Laborales 2..-LAPTOP-62J6SMPFDocumento18 pagineCopia de Matriz - Riesgos - Laborales 2..-LAPTOP-62J6SMPFIsabel TabaresNessuna valutazione finora
- Procedimiento Mantencion Enfriadores de CalcinaDocumento25 pagineProcedimiento Mantencion Enfriadores de Calcinajoa323Nessuna valutazione finora
- Actividad 4Documento4 pagineActividad 4Luisa Ma JaramilloNessuna valutazione finora
- MOTOSIERRADocumento11 pagineMOTOSIERRApilar_lamadridNessuna valutazione finora
- Pieza - Martillo - Procesos PDFDocumento8 paginePieza - Martillo - Procesos PDFjaimeNessuna valutazione finora
- Presentacion de Proyecto de Mejora de MetodosDocumento33 paginePresentacion de Proyecto de Mejora de MetodosEdy HuancaNessuna valutazione finora
- Pruebas de FormaciónDocumento11 paginePruebas de FormaciónVictor Valverde Ayala100% (1)
- Portafolio EvidenciaDocumento36 paginePortafolio Evidenciaamurillol100% (1)
- Descripcion de Las Partidas Ejecutadas Del MesDocumento37 pagineDescripcion de Las Partidas Ejecutadas Del MesFdz J LuisNessuna valutazione finora
- Memoria Sobre AlineamientoDocumento138 pagineMemoria Sobre AlineamientoIsrael DiazNessuna valutazione finora
- Manejo Seguro de HerramientasDocumento21 pagineManejo Seguro de HerramientasJavier Napoleón Colina PozoNessuna valutazione finora