Potrebbero piacerti anche
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Chapter 16Documento5 pagineChapter 16Luqman Hakim ShihabudinNessuna valutazione finora
- ELN 131 Lab1 DiodesDocumento6 pagineELN 131 Lab1 DiodesSarah ShermanNessuna valutazione finora
- Reference Document-Obstacle Detection System Final ReportDocumento17 pagineReference Document-Obstacle Detection System Final ReportNabeel KhanNessuna valutazione finora
- Activity FeedbackDocumento31 pagineActivity Feedbackrakesh hiremathNessuna valutazione finora
- A Um ADocumento127 pagineA Um Ahuy3iNessuna valutazione finora
- Scier Entechllearning: Logic GatesDocumento1 paginaScier Entechllearning: Logic GatesTarangNessuna valutazione finora
- Competency Matrix - Instrument PDFDocumento15 pagineCompetency Matrix - Instrument PDFAldeline SungahidNessuna valutazione finora
- Consumer ElectronicsDocumento9 pagineConsumer ElectronicsBhaskar BhaskiNessuna valutazione finora
- Awa-8411 Text ReportDocumento383 pagineAwa-8411 Text Reportapi-321235256Nessuna valutazione finora
- Wlxz3nlae9xdwvfrtnvmdvzv2pwr04yoa A Gp&Filename Diode+QueDocumento4 pagineWlxz3nlae9xdwvfrtnvmdvzv2pwr04yoa A Gp&Filename Diode+QueerjayprakashpatelNessuna valutazione finora
- Astra 1H: Frequency Plan Ku-Band UplinkDocumento2 pagineAstra 1H: Frequency Plan Ku-Band UplinkWan Wan SetyawanNessuna valutazione finora
- 1316f Micropower DC DC ConverterDocumento16 pagine1316f Micropower DC DC ConverternevdullNessuna valutazione finora
- TC 10 emDocumento7 pagineTC 10 emDina LydaNessuna valutazione finora
- OSS0501 SDH Principle PDFDocumento89 pagineOSS0501 SDH Principle PDFjmezatapiaNessuna valutazione finora
- ES - 32LS Multi Power Meter 1 Phase Modbus RTU TurkeyDocumento1 paginaES - 32LS Multi Power Meter 1 Phase Modbus RTU TurkeyBruce NguyễnNessuna valutazione finora
- BN46 00699A Eng PDFDocumento52 pagineBN46 00699A Eng PDFatm888Nessuna valutazione finora
- Improved-Power Quality Bridgeless - Converter-Based Multiple-Output SmpsDocumento11 pagineImproved-Power Quality Bridgeless - Converter-Based Multiple-Output SmpsKalyan Reddy AnuguNessuna valutazione finora
- Automatic Gen-Set Controller: Data Sheet Multi-Line 2Documento12 pagineAutomatic Gen-Set Controller: Data Sheet Multi-Line 2albertooliveira100% (2)
- 7720120191PL BerNationalDocumento764 pagine7720120191PL BerNationalHector Andres Peña RamirezNessuna valutazione finora
- Automotive Electronics Council - StandardsDocumento15 pagineAutomotive Electronics Council - StandardsAnonymous xaeuoo4Nessuna valutazione finora
- Smartbridges 3212 Ve 3412 Data SheetDocumento5 pagineSmartbridges 3212 Ve 3412 Data SheetsagoreNessuna valutazione finora
- Numerical Study On The Effects of Total Solid Concentration On Mixing Quality of Non-Newtonian Fluid in Cylindrical Anaerobic DigestersDocumento5 pagineNumerical Study On The Effects of Total Solid Concentration On Mixing Quality of Non-Newtonian Fluid in Cylindrical Anaerobic DigestersBruce LennyNessuna valutazione finora
- 1Documento2 pagine1Cristel BautistaNessuna valutazione finora
- LECTURE - 6 (IOTPP) Faculty Copy RoughDocumento33 pagineLECTURE - 6 (IOTPP) Faculty Copy Roughrega OpNessuna valutazione finora
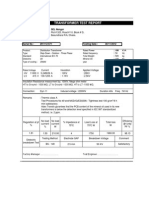
- X-Former Test Report For 100kVADocumento3 pagineX-Former Test Report For 100kVAnisargo0% (1)
- PC Build NEW!! PDFDocumento1 paginaPC Build NEW!! PDFAnonymous 1AEufxhKrNessuna valutazione finora
- Simbologia Eletrica 1Documento4 pagineSimbologia Eletrica 1SarjitoNessuna valutazione finora
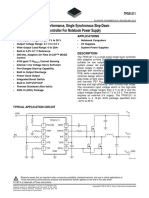
- Tps 51211Documento30 pagineTps 51211Kholit LitNessuna valutazione finora
- Slot AntennasDocumento8 pagineSlot AntennasStephen Dunifer100% (1)