Potrebbero piacerti anche
- Metamaterial Anisotropic Flux Concentrators and Magnetic ArraysDocumento13 pagineMetamaterial Anisotropic Flux Concentrators and Magnetic ArraysVlad MocanuNessuna valutazione finora
- Building ShipsDocumento4 pagineBuilding ShipsVlad MocanuNessuna valutazione finora
- IOSR - JEEE ProceedingsDocumento56 pagineIOSR - JEEE ProceedingsVlad MocanuNessuna valutazione finora
- Performance Measurement of A Three-Bladed Combined Darrieus-Savonius Rotor PDFDocumento7 paginePerformance Measurement of A Three-Bladed Combined Darrieus-Savonius Rotor PDFVlad MocanuNessuna valutazione finora
- Art Protectia PasivaDocumento5 pagineArt Protectia PasivaVlad MocanuNessuna valutazione finora
- Maximum Efficiency of A Wind TurbineDocumento12 pagineMaximum Efficiency of A Wind TurbineVlad MocanuNessuna valutazione finora
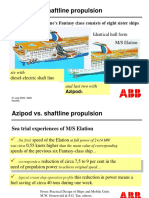
- Azipod ReferencesDocumento22 pagineAzipod ReferencesVlad MocanuNessuna valutazione finora
- ABB System Project Guide Passenger VesselsDocumento268 pagineABB System Project Guide Passenger VesselsVlad MocanuNessuna valutazione finora
- WEG Synchronous Motors 50019091 Brochure English PDFDocumento16 pagineWEG Synchronous Motors 50019091 Brochure English PDFVlad MocanuNessuna valutazione finora
- D-E Azipod Fantasy-ClassDocumento9 pagineD-E Azipod Fantasy-ClassVlad MocanuNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- AFF660 Flyer April 2015Documento2 pagineAFF660 Flyer April 2015Iulian BucurNessuna valutazione finora
- Different Approaches To Crack Monitoring of Buildings Using IOTDocumento11 pagineDifferent Approaches To Crack Monitoring of Buildings Using IOTIJRASETPublicationsNessuna valutazione finora
- HUAWEI - SD-WAN SolutionDocumento235 pagineHUAWEI - SD-WAN Solutionbuafac10Nessuna valutazione finora
- Service Manual: Digital WorkstationDocumento84 pagineService Manual: Digital WorkstationbeytullahNessuna valutazione finora
- Lab5 AnswerSheetDocumento3 pagineLab5 AnswerSheetnislam57Nessuna valutazione finora
- Review of DC-DC Converters in Photovoltaic Systems For MPPT SystemsDocumento5 pagineReview of DC-DC Converters in Photovoltaic Systems For MPPT SystemsLuis Angel Garcia ReyesNessuna valutazione finora
- Rational Root TheoremDocumento9 pagineRational Root TheoremAerown John Gonzales TamayoNessuna valutazione finora
- 6305ele S1L1Documento33 pagine6305ele S1L1M Moiz IlyasNessuna valutazione finora
- STAAD ANALYSIS - Adrressing Requirements AISC 341-10 - RAM - STAAD Forum - RAM - STAAD - Bentley CommunitiesDocumento2 pagineSTAAD ANALYSIS - Adrressing Requirements AISC 341-10 - RAM - STAAD Forum - RAM - STAAD - Bentley Communitieschondroc11Nessuna valutazione finora
- HeliTrim Manual en PDFDocumento9 pagineHeliTrim Manual en PDFJuan Pablo100% (1)
- Annual Exam COMPUTER SC Class XIDocumento8 pagineAnnual Exam COMPUTER SC Class XIST JOSEPH'S SCHOOLNessuna valutazione finora
- Virtual Reality and Innovation PotentialDocumento10 pagineVirtual Reality and Innovation PotentialUmerFarooqNessuna valutazione finora
- BLCC610I Solution 6000 Installation Manual FTR2.6Documento190 pagineBLCC610I Solution 6000 Installation Manual FTR2.6ammy17643Nessuna valutazione finora
- International Molecular Pathology Catalog 2020Documento222 pagineInternational Molecular Pathology Catalog 2020nam7124119Nessuna valutazione finora
- Water: Use of Decision Tables To Simulate Management in SWAT+Documento10 pagineWater: Use of Decision Tables To Simulate Management in SWAT+Hugo Lenin SanchezNessuna valutazione finora
- Lecture 6 NormalizationDocumento54 pagineLecture 6 NormalizationAndrea BatholomeoNessuna valutazione finora
- Java ProgrammingDocumento134 pagineJava ProgrammingArt LookNessuna valutazione finora
- Chicago Citation: Chicago Notes-Bibliography Style GuideDocumento4 pagineChicago Citation: Chicago Notes-Bibliography Style GuideElizaNessuna valutazione finora
- DSC-33C DSTC-40GDocumento1 paginaDSC-33C DSTC-40GsathishNessuna valutazione finora
- Fastpath Configuration Guide v1.1 PDFDocumento110 pagineFastpath Configuration Guide v1.1 PDFMonowarul Alam MonirNessuna valutazione finora
- HiFi ROSEDocumento1 paginaHiFi ROSEjesusrhNessuna valutazione finora
- OXYGEN™ Cabinet - Integration Guide For Player Tracking and Online Components 1.2Documento13 pagineOXYGEN™ Cabinet - Integration Guide For Player Tracking and Online Components 1.2villa1960Nessuna valutazione finora
- Using Visio PDFDocumento12 pagineUsing Visio PDFAnonymous Af4ORJNessuna valutazione finora
- Active Versus Passive DevicesDocumento6 pagineActive Versus Passive DevicesSneha BandhaviNessuna valutazione finora
- Cost Benefit AnalysisDocumento3 pagineCost Benefit AnalysisSaimo MghaseNessuna valutazione finora
- FAA Safety Briefing Nov-Dec 2017 PDFDocumento36 pagineFAA Safety Briefing Nov-Dec 2017 PDFAllison JacobsonNessuna valutazione finora
- Vladica Ognjanovic - Curriculum VitaeDocumento2 pagineVladica Ognjanovic - Curriculum VitaeVladica OgnjanovicNessuna valutazione finora
- Lewis David On The Plurality of WorldsDocumento279 pagineLewis David On The Plurality of Worldsdjoseph_1Nessuna valutazione finora
- 10 Challenges Facing Today's Applied Sport ScientistDocumento7 pagine10 Challenges Facing Today's Applied Sport ScientistDorian FigueroaNessuna valutazione finora
- Econstruct Issue 2Documento40 pagineEconstruct Issue 2ArNushiMahfodzNessuna valutazione finora