Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- His5B09 History of Modern India Module-4 Topic-Indian National ArmyDocumento6 pagineHis5B09 History of Modern India Module-4 Topic-Indian National ArmyavnishNessuna valutazione finora
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- Staircase TilingDocumento13 pagineStaircase TilingavnishNessuna valutazione finora
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Factorization Reduced To Order FindingDocumento4 pagineFactorization Reduced To Order FindingavnishNessuna valutazione finora
- Martin Heidegger S Concept of Authenticity A Philosophical Contribution To Student Affairs TheoryDocumento9 pagineMartin Heidegger S Concept of Authenticity A Philosophical Contribution To Student Affairs TheoryavnishNessuna valutazione finora
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- My CoursesDocumento108 pagineMy Coursesgyaniprasad49Nessuna valutazione finora
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Capital Expenditure DecisionDocumento10 pagineCapital Expenditure DecisionRakesh GuptaNessuna valutazione finora
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- 23 Things You Should Know About Excel Pivot Tables - Exceljet PDFDocumento21 pagine23 Things You Should Know About Excel Pivot Tables - Exceljet PDFRishavKrishna0% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Material Safety Data Sheet (According To 91/155 EC)Documento4 pagineMaterial Safety Data Sheet (According To 91/155 EC)Jaymit PatelNessuna valutazione finora
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Address MappingDocumento26 pagineAddress MappingLokesh KumarNessuna valutazione finora
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Unit Process 009Documento15 pagineUnit Process 009Talha ImtiazNessuna valutazione finora
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Resume Jameel 22Documento3 pagineResume Jameel 22sandeep sandyNessuna valutazione finora
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Ludwig Van Beethoven: Für EliseDocumento4 pagineLudwig Van Beethoven: Für Eliseelio torrezNessuna valutazione finora
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- Linux For Beginners - Shane BlackDocumento165 pagineLinux For Beginners - Shane BlackQuod Antichristus100% (1)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- A PDFDocumento2 pagineA PDFKanimozhi CheranNessuna valutazione finora
- Information Security Chapter 1Documento44 pagineInformation Security Chapter 1bscitsemvNessuna valutazione finora
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- Ingles Avanzado 1 Trabajo FinalDocumento4 pagineIngles Avanzado 1 Trabajo FinalFrancis GarciaNessuna valutazione finora
- Hexoskin - Information For Researchers - 01 February 2023Documento48 pagineHexoskin - Information For Researchers - 01 February 2023emrecan cincanNessuna valutazione finora
- A. The Machine's Final Recorded Value Was P1,558,000Documento7 pagineA. The Machine's Final Recorded Value Was P1,558,000Tawan VihokratanaNessuna valutazione finora
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- CS321 Computer ArchitectureDocumento160 pagineCS321 Computer ArchitectureAnurag kumarNessuna valutazione finora
- 450i User ManualDocumento54 pagine450i User ManualThượng Lê Văn0% (2)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- Simoreg ErrorDocumento30 pagineSimoreg Errorphth411Nessuna valutazione finora
- Use of EnglishDocumento4 pagineUse of EnglishBelén SalituriNessuna valutazione finora
- JAZEL Resume-2-1-2-1-3-1Documento2 pagineJAZEL Resume-2-1-2-1-3-1GirlieJoyGayoNessuna valutazione finora
- Chapter 5Documento3 pagineChapter 5Showki WaniNessuna valutazione finora
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Selvan CVDocumento4 pagineSelvan CVsuman_civilNessuna valutazione finora
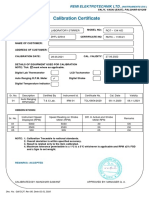
- Calibration CertificateDocumento1 paginaCalibration CertificateSales GoldClassNessuna valutazione finora
- Sterling B2B Integrator - Installing and Uninstalling Standards - V5.2Documento20 pagineSterling B2B Integrator - Installing and Uninstalling Standards - V5.2Willy GaoNessuna valutazione finora
- Fidp ResearchDocumento3 pagineFidp ResearchIn SanityNessuna valutazione finora
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Shubham Tonk - ResumeDocumento2 pagineShubham Tonk - ResumerajivNessuna valutazione finora
- Binary File MCQ Question Bank For Class 12 - CBSE PythonDocumento51 pagineBinary File MCQ Question Bank For Class 12 - CBSE Python09whitedevil90Nessuna valutazione finora
- Social Media Marketing Advice To Get You StartedmhogmDocumento2 pagineSocial Media Marketing Advice To Get You StartedmhogmSanchezCowan8Nessuna valutazione finora
- CHAPTER 3 Social Responsibility and EthicsDocumento54 pagineCHAPTER 3 Social Responsibility and EthicsSantiya Subramaniam100% (4)
- TEVTA Fin Pay 1 107Documento3 pagineTEVTA Fin Pay 1 107Abdul BasitNessuna valutazione finora
- Basics: Define The Task of Having Braking System in A VehicleDocumento27 pagineBasics: Define The Task of Having Braking System in A VehiclearupNessuna valutazione finora
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)