Potrebbero piacerti anche
- Exploring Arduino: Tools and Techniques for Engineering WizardryDa EverandExploring Arduino: Tools and Techniques for Engineering WizardryValutazione: 4.5 su 5 stelle4.5/5 (5)
- Car Hackers Handbook Sample Chapter5Documento11 pagineCar Hackers Handbook Sample Chapter5viernes06Nessuna valutazione finora
- What Are The Best Telemarketing Scripts?: 4 AnswersDocumento4 pagineWhat Are The Best Telemarketing Scripts?: 4 AnswersDaniela SoaresNessuna valutazione finora
- Ralco R302 Collimator Service ManualDocumento173 pagineRalco R302 Collimator Service ManualMadhavesh KulkarniNessuna valutazione finora
- L298N Motor DriverDocumento7 pagineL298N Motor DrivercerenautaNessuna valutazione finora
- Arduino Arduino Arduino Arduino 2 2 2 2 Channel Channel Channel Channel Relay Relay Relay Relay Shield Shield Shield ShieldDocumento8 pagineArduino Arduino Arduino Arduino 2 2 2 2 Channel Channel Channel Channel Relay Relay Relay Relay Shield Shield Shield ShieldWisnuNessuna valutazione finora
- PLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingDa EverandPLC Programming Using SIMATIC MANAGER for Beginners: With Basic Concepts of Ladder Logic ProgrammingValutazione: 4 su 5 stelle4/5 (1)
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkDa EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNessuna valutazione finora
- An English Temne DictionaryDocumento423 pagineAn English Temne Dictionary1scribe2011Nessuna valutazione finora
- IoT Based Raspberry Pi Smart Energy MonitorDocumento17 pagineIoT Based Raspberry Pi Smart Energy MonitorKoushik Maity100% (1)
- BMP180 (Barometric Pressure Sensor) : SpecificationsDocumento34 pagineBMP180 (Barometric Pressure Sensor) : Specificationsabhilash100% (3)
- (Francesco - Flammini, - Francesco - Flammini) - Railway Safety, Reliability and SecurityDocumento488 pagine(Francesco - Flammini, - Francesco - Flammini) - Railway Safety, Reliability and Securityperry.stamatiouNessuna valutazione finora
- Probation Period ReportDocumento17 pagineProbation Period ReportMiranti Puspitasari0% (1)
- Arpi600 User ManualDocumento19 pagineArpi600 User ManualGoran JosicNessuna valutazione finora
- Manual English-V2.6 PDFDocumento21 pagineManual English-V2.6 PDFpancawawanNessuna valutazione finora
- Manual English V3.0Documento24 pagineManual English V3.0Miguel VegaNessuna valutazione finora
- Chapter 05 How To Control Servo Motor Using PythonDocumento5 pagineChapter 05 How To Control Servo Motor Using Python0xbitNessuna valutazione finora
- Spider Controller Instrucuction ManualDocumento5 pagineSpider Controller Instrucuction ManualNabilo MarcelloNessuna valutazione finora
- Pan-Tilt HAT User Manual enDocumento17 paginePan-Tilt HAT User Manual enPhạm TuấnNessuna valutazione finora
- 16 Channel PWM Servo DriverDocumento20 pagine16 Channel PWM Servo DriverFelipe Cherfan100% (1)
- Using Xbee Radios For Telemetry With APMDocumento15 pagineUsing Xbee Radios For Telemetry With APMHaRyono D AnwarNessuna valutazione finora
- ESP8266 WiFi Module Quick Start Guide V 1.0.4Documento15 pagineESP8266 WiFi Module Quick Start Guide V 1.0.4Mitesh Khadgi100% (1)
- Integrating Arduino Into PLC SystemDocumento16 pagineIntegrating Arduino Into PLC Systeml1f3b00kNessuna valutazione finora
- Omega2S App Note - Generating PWM SignalsDocumento8 pagineOmega2S App Note - Generating PWM SignalsKarthik ManiNessuna valutazione finora
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDocumento15 pagineSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSMardan Sabily Hasibuan100% (2)
- DC Motor Speed ControlDocumento7 pagineDC Motor Speed ControlBiyadglgne Eskezia AyalewNessuna valutazione finora
- Esp8266 Wifi Module Quick Start Guide V 1.0.4Documento15 pagineEsp8266 Wifi Module Quick Start Guide V 1.0.4bazeeshaikngmNessuna valutazione finora
- GSM Gprs Modem - Neoway M590eDocumento14 pagineGSM Gprs Modem - Neoway M590eTaner Yener ÇolakNessuna valutazione finora
- Rpi Based Waste ManagementDocumento16 pagineRpi Based Waste ManagementVishwas VNessuna valutazione finora
- Multiservo Shield 1.1. FeaturesDocumento7 pagineMultiservo Shield 1.1. FeaturesJay MenonNessuna valutazione finora
- Turngy 9x ManualDocumento7 pagineTurngy 9x Manualتيه تاريق مادوNessuna valutazione finora
- Massachusetts Institute of Technology 2.12 Introduction To RoboticsDocumento5 pagineMassachusetts Institute of Technology 2.12 Introduction To RoboticsHenry Lois Davila AndradeNessuna valutazione finora
- User'S Manual: JULY, 2015Documento12 pagineUser'S Manual: JULY, 2015Mudassar RafiqNessuna valutazione finora
- HF-LPX30 Series EVK Quick Start Guide - 20171018Documento18 pagineHF-LPX30 Series EVK Quick Start Guide - 20171018Олег КостадиновNessuna valutazione finora
- Pic Servo SCDocumento51 paginePic Servo SCFvck Ccp100% (1)
- 12 Unit10 WiFiDocumento29 pagine12 Unit10 WiFiDhudy PolanunuNessuna valutazione finora
- Servo Motor Control With Raspberry Pi: by Lanc1999Documento6 pagineServo Motor Control With Raspberry Pi: by Lanc1999Hans Sebastian Navarrete LopezNessuna valutazione finora
- 4 Relays Module ENGDocumento17 pagine4 Relays Module ENGwilsnicoNessuna valutazione finora
- ADAM 6022 ManualDocumento24 pagineADAM 6022 ManualIndust TGNessuna valutazione finora
- Md0332 Wifi Shield Esp13 KeysDocumento10 pagineMd0332 Wifi Shield Esp13 KeysbluesbankyNessuna valutazione finora
- CC 1101Documento11 pagineCC 1101Canaan HobbsNessuna valutazione finora
- LC 12V WIFI Relay ModuleDocumento11 pagineLC 12V WIFI Relay ModuleDaniel HernandezNessuna valutazione finora
- Soil Moisture Sensor Module - ENDocumento20 pagineSoil Moisture Sensor Module - ENSanti MartínNessuna valutazione finora
- Avr Dev BRD User ManualDocumento17 pagineAvr Dev BRD User ManualVipul MistryNessuna valutazione finora
- SSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSDocumento15 pagineSSC-32 Ver 2.0: Manual Written For Firmware Version SSC32-1.06XE Range Is 0.50mS To 2.50mSSergio Juan100% (1)
- Dragon Wave Harmony Compact Plus SetupDocumento9 pagineDragon Wave Harmony Compact Plus Setupibrar MuhammadNessuna valutazione finora
- Unit 4 Important Q&aDocumento15 pagineUnit 4 Important Q&ahariniNessuna valutazione finora
- Serial 8-Servo Controller: User's GuideDocumento8 pagineSerial 8-Servo Controller: User's GuideMohamad GhazaliNessuna valutazione finora
- TOSR0X-T User Manual PDFDocumento27 pagineTOSR0X-T User Manual PDFYuriy YatsyshynNessuna valutazione finora
- IOTDocumento79 pagineIOTsowmya kambhampatiNessuna valutazione finora
- Assignment 3Documento18 pagineAssignment 3Bhakti KalyankastureNessuna valutazione finora
- GSM GPRS Modem - Neoway M590 M590E PDFDocumento14 pagineGSM GPRS Modem - Neoway M590 M590E PDFrMON GORRRWWEWNessuna valutazione finora
- WIFI Relay ModuleDocumento14 pagineWIFI Relay ModuleDOUDOU-38Nessuna valutazione finora
- Virtual Reality Robot With 3D VisionDocumento13 pagineVirtual Reality Robot With 3D VisionROHAN MUKESH SUMESARANessuna valutazione finora
- Lab 1Documento9 pagineLab 1Malik YousafNessuna valutazione finora
- Owl RobotDocumento32 pagineOwl RobotgerpemNessuna valutazione finora
- Pololu Micro Serial Controller Ssc03a - GuideDocumento8 paginePololu Micro Serial Controller Ssc03a - Guidexlam99Nessuna valutazione finora
- SWM VHF PDFDocumento6 pagineSWM VHF PDFshubhraenergyNessuna valutazione finora
- MQ-135 Gas Sensor Module - ENDocumento24 pagineMQ-135 Gas Sensor Module - ENSanti Martín100% (1)
- Crius All in One Pro V1.3docxDocumento9 pagineCrius All in One Pro V1.3docxAdrian TudorNessuna valutazione finora
- CCNA2 Lab 7 2 7 enDocumento6 pagineCCNA2 Lab 7 2 7 enapi-3809703Nessuna valutazione finora
- Arduino Hack PLC Siemens Through Lanwifi IndustriaDocumento13 pagineArduino Hack PLC Siemens Through Lanwifi IndustriaImran YasinNessuna valutazione finora
- Microsoft Word - PIC16F877A Micro Controller Project TutorialDocumento19 pagineMicrosoft Word - PIC16F877A Micro Controller Project TutoriallocthanhNessuna valutazione finora
- Nokia.Documento1 paginaNokia.kshiti ahireNessuna valutazione finora
- ConfiguracionDocumento32 pagineConfiguracionangelmauriciormzNessuna valutazione finora
- Requirements of Push NotificationDocumento14 pagineRequirements of Push Notificationdarshan89Nessuna valutazione finora
- GG 05 09 2012 200 PDFDocumento4 pagineGG 05 09 2012 200 PDFpapaki2100% (1)
- 01 Hardware and LoopDocumento43 pagine01 Hardware and LoopkarthickNessuna valutazione finora
- 459251104-DCS-UH-1H-Flight-Manual-EN-pdf 5Documento1 pagina459251104-DCS-UH-1H-Flight-Manual-EN-pdf 5mav87th-1Nessuna valutazione finora
- ACO 3901manual EditionEDocumento104 pagineACO 3901manual EditionEs1234tNessuna valutazione finora
- Plenty of Room - Nnano.2009.356Documento1 paginaPlenty of Room - Nnano.2009.356Mario PgNessuna valutazione finora
- Open Transaction Manager Access Guide and Reference: IBM ConfidentialDocumento183 pagineOpen Transaction Manager Access Guide and Reference: IBM ConfidentialvgrynyukNessuna valutazione finora
- VP Operations Job DescriptionDocumento2 pagineVP Operations Job DescriptionAmol Ghemud100% (1)
- Controlling Rail Potential of DC Supplied Rail Traction Systems PDFDocumento10 pagineControlling Rail Potential of DC Supplied Rail Traction Systems PDFysperdanaNessuna valutazione finora
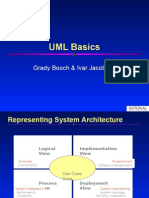
- UML Basics: Grady Booch & Ivar JacobsonDocumento101 pagineUML Basics: Grady Booch & Ivar Jacobsongunasekaran.subramani3879100% (1)
- Configuring The Thomson Gateway SIP ServerDocumento15 pagineConfiguring The Thomson Gateway SIP ServerFurueiNessuna valutazione finora
- Agile Data ModelingDocumento5 pagineAgile Data ModelingBlitz DocumentNessuna valutazione finora
- Javascript NotesDocumento55 pagineJavascript NotesJony nathNessuna valutazione finora
- School Management System: A Synopsis Submitted in Partial Fulfillment of The Requirements For The Degree of inDocumento12 pagineSchool Management System: A Synopsis Submitted in Partial Fulfillment of The Requirements For The Degree of inankush rathorNessuna valutazione finora
- Amazon - de Android TV BoxDocumento1 paginaAmazon - de Android TV BoxMirelaBurgic-SalihovicNessuna valutazione finora
- Speaker Sound Bar Lsb316Documento28 pagineSpeaker Sound Bar Lsb316catifoNessuna valutazione finora
- Prismaflex 8.1: For Continuous Extracorporeal Blood Purification TherapiesDocumento2 paginePrismaflex 8.1: For Continuous Extracorporeal Blood Purification TherapiesIftekhar AhamedNessuna valutazione finora
- Archimate 3.1 - Delegate PackDocumento318 pagineArchimate 3.1 - Delegate PackvinodNessuna valutazione finora
- Grid Computing IT1012 CS1018Documento7 pagineGrid Computing IT1012 CS1018Anoop CHNessuna valutazione finora
- Assignment No.7 PDFDocumento6 pagineAssignment No.7 PDFAbdul HameedNessuna valutazione finora
- Lift Monitor Manual PDFDocumento10 pagineLift Monitor Manual PDFReza KühnNessuna valutazione finora
- DLM382 DLM432: en SV No Fi LV LT Et RuDocumento80 pagineDLM382 DLM432: en SV No Fi LV LT Et RuAivaras SaniukasNessuna valutazione finora
- 5000 Watt BLDC Electric Motor Heavy Duty BLDC MotorDocumento3 pagine5000 Watt BLDC Electric Motor Heavy Duty BLDC MotorabhayuietNessuna valutazione finora