Potrebbero piacerti anche
- Segundo Avance Caf2Documento6 pagineSegundo Avance Caf2ashley cagbaeNessuna valutazione finora
- Adquisicion y Monitoreo de Las Principales Variables de Una Planta de Paneles SolaresDocumento6 pagineAdquisicion y Monitoreo de Las Principales Variables de Una Planta de Paneles SolaresArley Villa SalazarNessuna valutazione finora
- Construcción Balanza WattDocumento6 pagineConstrucción Balanza WattJesús Andrés CuastumalNessuna valutazione finora
- Informe CapacitorDocumento2 pagineInforme Capacitorelydelvis torresNessuna valutazione finora
- Convertidor Ca A CCDocumento3 pagineConvertidor Ca A CCBryan ToapantaNessuna valutazione finora
- 01trabajo de Investigacion Fisica Aplicada2Documento11 pagine01trabajo de Investigacion Fisica Aplicada2Angelo GCNessuna valutazione finora
- CESEN STEVEN 3B ProyectoFinalDocumento10 pagineCESEN STEVEN 3B ProyectoFinalFloor Style CrewNessuna valutazione finora
- Triptico - Proyecto Primer GradoDocumento3 pagineTriptico - Proyecto Primer GradodiegpNessuna valutazione finora
- Informe InductoresDocumento2 pagineInforme InductoresLeonardo Garrido QuirogaNessuna valutazione finora
- Reporte de Las Practicas de Circuitos (En Serie y Paralelo) .Documento7 pagineReporte de Las Practicas de Circuitos (En Serie y Paralelo) .Trujillo Segundo DiegoNessuna valutazione finora
- Practica 4 ComponentesDocumento4 paginePractica 4 ComponentesDeraald TasartirNessuna valutazione finora
- Artículo CientíficoDocumento3 pagineArtículo CientíficoJosehp Angel Henao RojasNessuna valutazione finora
- Informe de Proyecto G6Documento8 pagineInforme de Proyecto G6ashley cagbaeNessuna valutazione finora
- Informe - Laboratorioii TransistoresDocumento6 pagineInforme - Laboratorioii TransistoresStefania Giraldo MosqueraNessuna valutazione finora
- Articulo Cientifico Proyecto SteamDocumento11 pagineArticulo Cientifico Proyecto SteamValentina Sánchez SánchezNessuna valutazione finora
- Proyecto Organización de ComputadorasDocumento12 pagineProyecto Organización de ComputadorasJOE SNessuna valutazione finora
- Informe N5Documento9 pagineInforme N5jose daniel sarmiento blancoNessuna valutazione finora
- Cap.1 El Diodo en Los Circuitos PDFDocumento80 pagineCap.1 El Diodo en Los Circuitos PDFAaron VelardeNessuna valutazione finora
- Computadoras Cuanticas y Numeros FibonnachiDocumento27 pagineComputadoras Cuanticas y Numeros FibonnachiMichael LinaresNessuna valutazione finora
- Memorias de Catedra Electrónica 1Documento520 pagineMemorias de Catedra Electrónica 1Abel CarvajalNessuna valutazione finora
- Capacitancia Y Circuito RC: 1. Objetivo 1.1 Objetivo GeneralDocumento5 pagineCapacitancia Y Circuito RC: 1. Objetivo 1.1 Objetivo Generalmanuel joel zapana gutierrezNessuna valutazione finora
- Sesion04 Parámetros BasicosDocumento35 pagineSesion04 Parámetros BasicosAmaliaVasquezNessuna valutazione finora
- Tarea Fisica Grupo 6Documento15 pagineTarea Fisica Grupo 6vídeos de FRANKNessuna valutazione finora
- Laboratorio 1 Fisica 3Documento11 pagineLaboratorio 1 Fisica 3Juan Pablo Flórez RamírezNessuna valutazione finora
- Informe 1 Laboratorio CyE.Documento13 pagineInforme 1 Laboratorio CyE.Sofia De Los Angeles Duarte GuillenNessuna valutazione finora
- Practica 1 Manejo de ProtoboardDocumento4 paginePractica 1 Manejo de ProtoboardDeraald TasartirNessuna valutazione finora
- FoucaultDocumento8 pagineFoucaultpatricioNessuna valutazione finora
- Trabajo Final - Anillo de ThomsonDocumento12 pagineTrabajo Final - Anillo de ThomsonAlexánder Arias farfánNessuna valutazione finora
- Trabajo FinalDocumento20 pagineTrabajo FinalJazmin Tapia GarcíaNessuna valutazione finora
- Practica 8Documento10 paginePractica 8Edison OrtegaNessuna valutazione finora
- INTRODUCCIÓNDocumento2 pagineINTRODUCCIÓNEstefaniPortalVargasNessuna valutazione finora
- Capacitancia y Circuito RCDocumento5 pagineCapacitancia y Circuito RCmanuel joel zapana gutierrezNessuna valutazione finora
- Proyecto Bobina Tesla Trabajo Final de Caf2Documento16 pagineProyecto Bobina Tesla Trabajo Final de Caf2Jostin AguirreNessuna valutazione finora
- INFORME LABORATORIO LINEAS EQUIPOTENCIALES (Autoguardado)Documento10 pagineINFORME LABORATORIO LINEAS EQUIPOTENCIALES (Autoguardado)Madelen CatacoraNessuna valutazione finora
- Proyecto - Diseño de Circuito Seguidor SolarDocumento13 pagineProyecto - Diseño de Circuito Seguidor SolarAugusto CesarNessuna valutazione finora
- Nuevas Tecnologias de Circuitos Integrados Con Redes Neuronales HibridasDocumento9 pagineNuevas Tecnologias de Circuitos Integrados Con Redes Neuronales HibridasRuben Roberto NavarroNessuna valutazione finora
- Modelos de Sistemas Eléctricos de Corriente AlternaDocumento61 pagineModelos de Sistemas Eléctricos de Corriente AlternaMCOD12Nessuna valutazione finora
- Practica 1 Laboratorio - RCDocumento5 paginePractica 1 Laboratorio - RCJuan SebastianNessuna valutazione finora
- Proyecto Final Pendulo Simple, Karen Beltran Villanueva, Andres David Serrano Vivas, David Alexander Sanchez DiazDocumento7 pagineProyecto Final Pendulo Simple, Karen Beltran Villanueva, Andres David Serrano Vivas, David Alexander Sanchez DiazBe Ka VINessuna valutazione finora
- Avance Del Proyecto CAF2Documento6 pagineAvance Del Proyecto CAF2Rafael SMNessuna valutazione finora
- Caracterización de Sensores de NivelDocumento5 pagineCaracterización de Sensores de NivelAndres ReyesNessuna valutazione finora
- Informe de Laboratorio 5Documento17 pagineInforme de Laboratorio 5LauraNessuna valutazione finora
- Proyecto Caf2Documento20 pagineProyecto Caf2José Luis Morales VegaNessuna valutazione finora
- Informe Proyecto Final Subgrupo 1 Grupo S1 Física IiDocumento20 pagineInforme Proyecto Final Subgrupo 1 Grupo S1 Física IiDJ FELIPE RuiizNessuna valutazione finora
- Circuitos en MallaDocumento6 pagineCircuitos en MallaJORDAN STIVEN CAIZA CAJASNessuna valutazione finora
- Galvanometro Lab 1Documento2 pagineGalvanometro Lab 1Gustavo RojanoNessuna valutazione finora
- U1EP1 Galvanómetro Daila Gallegos Lidia DanaeDocumento10 pagineU1EP1 Galvanómetro Daila Gallegos Lidia DanaeVictor Mora RomoNessuna valutazione finora
- Informe #1 El OsciloscopioDocumento2 pagineInforme #1 El OsciloscopioEvia JhonNessuna valutazione finora
- Manual de Practicas de Electronica de Potencia AplicadaDocumento49 pagineManual de Practicas de Electronica de Potencia AplicadaBarzilai Isidoro JeronimoNessuna valutazione finora
- Aplicación de Las Integrales para Hallar La Longitud de Arco, Tensión Máxima, El Área Bajo La Curva y El Valor Medio Del Gasto Anual en Las Torres Eléctricas de Alta TensiónDocumento20 pagineAplicación de Las Integrales para Hallar La Longitud de Arco, Tensión Máxima, El Área Bajo La Curva y El Valor Medio Del Gasto Anual en Las Torres Eléctricas de Alta TensiónNéstor Valles VillarrealNessuna valutazione finora
- Puesta A Tierra Con BalanceoDocumento17 paginePuesta A Tierra Con BalanceoRosse Bernardo TandaypanNessuna valutazione finora
- NRC186. Articulo Proyecto FinalDocumento13 pagineNRC186. Articulo Proyecto FinalAmanda BustamanteNessuna valutazione finora
- Sílabo de Fïsica ElectrónicaDocumento6 pagineSílabo de Fïsica ElectrónicaJORGE JESUS QUISPE VILLAVERDENessuna valutazione finora
- Informe Lab No. 8Documento3 pagineInforme Lab No. 8Juan David BaenaNessuna valutazione finora
- Simulacon de Un Levitador Magnetico paraDocumento6 pagineSimulacon de Un Levitador Magnetico paraRuben Fuentes FuentesNessuna valutazione finora
- Circuit MakerDocumento2 pagineCircuit MakerMateo AgudeloNessuna valutazione finora
- Proyecto Caf2 V 2.0Documento10 pagineProyecto Caf2 V 2.0Anonymous DKmkHx2fNessuna valutazione finora
- Experiencias sobre circuitos eléctricos en serie operados por corriente directaDa EverandExperiencias sobre circuitos eléctricos en serie operados por corriente directaNessuna valutazione finora
- Curso de Electrónica - Electrónica BásicaDa EverandCurso de Electrónica - Electrónica BásicaValutazione: 4 su 5 stelle4/5 (12)
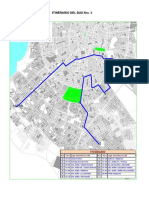
- Itinerario Bus. Nro. 3Documento1 paginaItinerario Bus. Nro. 3Bruno AlcocerNessuna valutazione finora
- Itinerario: Nro. Hora Lugar (Avenida Y/o Calle Nro. Hora Lugar (Avenida Y/o CalleDocumento1 paginaItinerario: Nro. Hora Lugar (Avenida Y/o Calle Nro. Hora Lugar (Avenida Y/o CalleBruno AlcocerNessuna valutazione finora
- Procedimiento de Trabajo Seguro para Realizar Hot Tap - CompressDocumento34 pagineProcedimiento de Trabajo Seguro para Realizar Hot Tap - CompressJuan de la Cruz0% (1)
- Procedimiento de Trabajo Seguro para Realizar Hot Tap - CompressDocumento34 pagineProcedimiento de Trabajo Seguro para Realizar Hot Tap - CompressJuan de la Cruz0% (1)
- Opcion1 - Cambiar Compilacion de OfficeDocumento1 paginaOpcion1 - Cambiar Compilacion de OfficeBruno AlcocerNessuna valutazione finora
- lfXeXrTxTEWg6qUPN6qc Cuaderno de Trabajo 01 - Webinar Week 2021Documento11 paginelfXeXrTxTEWg6qUPN6qc Cuaderno de Trabajo 01 - Webinar Week 2021Bruno AlcocerNessuna valutazione finora
- Procedimiento de Trabajo Seguro para Realizar Hot TapDocumento34 pagineProcedimiento de Trabajo Seguro para Realizar Hot TapBruno AlcocerNessuna valutazione finora
- Ejercicios Basicos S7-1200Documento35 pagineEjercicios Basicos S7-1200Rene Vazquez Ruiz90% (10)
- Declaración de Seguridad Y Confidencialidad en El Uso de Los Recursos de Tecnología InformáticaDocumento1 paginaDeclaración de Seguridad Y Confidencialidad en El Uso de Los Recursos de Tecnología InformáticaBruno AlcocerNessuna valutazione finora
- Perfil NacaDocumento2 paginePerfil NacaBruno AlcocerNessuna valutazione finora
- Ejercicio 2Documento2 pagineEjercicio 2Bruno AlcocerNessuna valutazione finora
- Clase Del 1 de SepDocumento16 pagineClase Del 1 de SepBruno AlcocerNessuna valutazione finora
- DfsdfsDocumento1 paginaDfsdfsBruno AlcocerNessuna valutazione finora
- Razer Accesorios y Gamepad Black Friday 2019Documento1 paginaRazer Accesorios y Gamepad Black Friday 2019Bruno AlcocerNessuna valutazione finora
- Pre Informe Numero 3Documento7 paginePre Informe Numero 3Bruno AlcocerNessuna valutazione finora
- DCFSDFSDFSDDocumento1 paginaDCFSDFSDFSDBruno AlcocerNessuna valutazione finora
- Malla AntiguaDocumento1 paginaMalla AntiguaBruno AlcocerNessuna valutazione finora
- Labo 3 Circuitos 3Documento8 pagineLabo 3 Circuitos 3Bruno AlcocerNessuna valutazione finora
- Informe Sis Sec 2Documento4 pagineInforme Sis Sec 2Bruno AlcocerNessuna valutazione finora
- Formulario Postulacion A Pasantias 2018Documento1 paginaFormulario Postulacion A Pasantias 2018Abel Alfio Martinez CruzNessuna valutazione finora
- Laboratorio Numero 1 Circuitos IIDocumento3 pagineLaboratorio Numero 1 Circuitos IIBruno AlcocerNessuna valutazione finora
- Informe FiltrosDocumento9 pagineInforme FiltrosJecar Cortez VergaraNessuna valutazione finora
- Preinforme Numero 2Documento4 paginePreinforme Numero 2Bruno AlcocerNessuna valutazione finora
- Tema06.Circuitos Secuenciales SincronosDocumento32 pagineTema06.Circuitos Secuenciales SincronosChristian Fonseca RodriguezNessuna valutazione finora
- Informe de ResonanciaDocumento1 paginaInforme de ResonanciaBruno AlcocerNessuna valutazione finora
- Informe de ResonanciaDocumento5 pagineInforme de ResonanciaGiovanni QCNessuna valutazione finora
- Informe Sis Sec 2Documento4 pagineInforme Sis Sec 2Bruno AlcocerNessuna valutazione finora
- p6 Sis113Documento3 paginep6 Sis113Bruno AlcocerNessuna valutazione finora
- Circuitos 7Documento8 pagineCircuitos 7Bruno AlcocerNessuna valutazione finora
- Conflicto RH 2018 PDFDocumento50 pagineConflicto RH 2018 PDFflorencia gomez100% (1)
- 001 002 RR SAN ANTONIO EL DIQUE 2019 - Solicitud Cambio de Trazado - CP 04Documento2 pagine001 002 RR SAN ANTONIO EL DIQUE 2019 - Solicitud Cambio de Trazado - CP 04Belen Aracelly Rojas ReascosNessuna valutazione finora
- Tendencias y Oportunidades de EmprendimientoDocumento6 pagineTendencias y Oportunidades de EmprendimientoVane GarcesNessuna valutazione finora
- PRÁCTICUM 4.1 Cuestionario 2 Evalué Aspecto de Derecho Procesal Penal.Documento7 paginePRÁCTICUM 4.1 Cuestionario 2 Evalué Aspecto de Derecho Procesal Penal.Sebastian MartinezNessuna valutazione finora
- Sega - Manuales - Modulo NominaDocumento106 pagineSega - Manuales - Modulo NominaTony CanTamNessuna valutazione finora
- Innovación - 2°Documento20 pagineInnovación - 2°Florencia RiosNessuna valutazione finora
- Celula Madre TripticoDocumento2 pagineCelula Madre Tripticochadynet100% (12)
- Grado 8. Guia 3-FactorizacionDocumento3 pagineGrado 8. Guia 3-FactorizacionluiscuestapereaNessuna valutazione finora
- C V D RaquelDocumento19 pagineC V D RaquelRosario TapiaNessuna valutazione finora
- Tarea 3 - Taller de Seguridad AlimentariaDocumento8 pagineTarea 3 - Taller de Seguridad AlimentariaAleja AngaritaNessuna valutazione finora
- Carta Fondo de AdaptacionDocumento2 pagineCarta Fondo de AdaptacionLuz Dary Caro JimenezNessuna valutazione finora
- Miología BovinoDocumento101 pagineMiología BovinoFer Aravena Toledo100% (1)
- Sentencias If y SwitchDocumento15 pagineSentencias If y SwitchAlejandro AlcocerNessuna valutazione finora
- Ficha Tecnica Johana 01joyzDocumento7 pagineFicha Tecnica Johana 01joyzJohanna Guerrero Vargas100% (1)
- Agroecologia en La SierraDocumento4 pagineAgroecologia en La SierraAramisNessuna valutazione finora
- Escribimos Pregones Con Los AlimentosDocumento5 pagineEscribimos Pregones Con Los AlimentosAdan Fernando Paredes MazaNessuna valutazione finora
- Evaluaciones Plan de Lección Diaria Clase 5toDocumento167 pagineEvaluaciones Plan de Lección Diaria Clase 5toZuly DiazNessuna valutazione finora
- Ficha Tecnica AminoacidosDocumento14 pagineFicha Tecnica AminoacidosalbertoNessuna valutazione finora
- Leyenda de La HuacacinaDocumento3 pagineLeyenda de La HuacacinaAlex AguilarNessuna valutazione finora
- Ambev ArgentinaDocumento30 pagineAmbev ArgentinaAlvin EspinalNessuna valutazione finora
- DanielaOráculo de VidaDocumento16 pagineDanielaOráculo de VidaAlia Kristhaya100% (4)
- Sitio Del Suceso - CriminalísticaDocumento26 pagineSitio Del Suceso - CriminalísticaYisnelly Camargo100% (2)
- 8 Gestion de Calidad Digemid Minsa PDFDocumento43 pagine8 Gestion de Calidad Digemid Minsa PDFalfredo1000_mv2414Nessuna valutazione finora
- Semana 13-EcologíaDocumento18 pagineSemana 13-EcologíaADRIANA CECILIA TROYA HUAMANNessuna valutazione finora
- Ejercicios y Autoevaluacion - CeDocumento9 pagineEjercicios y Autoevaluacion - CeLIRIAN MARQUEZ RODRIGUEZNessuna valutazione finora
- Compendio General AjefistaDocumento58 pagineCompendio General AjefistaEmilio I. Rodríguez Jr.100% (1)
- ExtractoDocumento2 pagineExtractoEricka Rodriguez ANessuna valutazione finora
- Manual Sauna-Finlandesa InbecaDocumento41 pagineManual Sauna-Finlandesa InbecadievelynNessuna valutazione finora
- Mapa ConceptualDocumento1 paginaMapa ConceptualmiguelNessuna valutazione finora
- Talleres AfiliadosDocumento9 pagineTalleres AfiliadosYudith PalenciaNessuna valutazione finora