Potrebbero piacerti anche
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- 1.1.2.A Investigating Basic Circuits - DMSDocumento9 pagine1.1.2.A Investigating Basic Circuits - DMSBilly bobsNessuna valutazione finora
- EP Board PDFDocumento2 pagineEP Board PDFReza KühnNessuna valutazione finora
- Ak111 (Three Phases, 50&60hz)Documento8 pagineAk111 (Three Phases, 50&60hz)Christian Rivera FloverNessuna valutazione finora
- Sanet - ST - Optical Fiber CommunicationsDocumento474 pagineSanet - ST - Optical Fiber Communicationskabi6713Nessuna valutazione finora
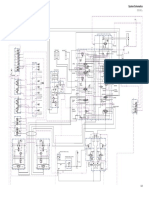
- Esquema Hidráulico Sany SY215C-AND-SY235Documento1 paginaEsquema Hidráulico Sany SY215C-AND-SY235juanchis650100% (1)
- ASK DemodulatorDocumento24 pagineASK DemodulatorKrista JacksonNessuna valutazione finora
- DILO 3-038-R SF6 Multi-AnalyserDocumento3 pagineDILO 3-038-R SF6 Multi-Analyserfrancis erl ligsayNessuna valutazione finora
- S&T UNIT I INTRODUCTION Part A (2mark)Documento3 pagineS&T UNIT I INTRODUCTION Part A (2mark)senthilkumar100% (1)
- User Manual: 3.6KW/5.6KW Solar Inverter / ChargerDocumento82 pagineUser Manual: 3.6KW/5.6KW Solar Inverter / ChargerStLisNessuna valutazione finora
- 01 Power TransformerDocumento23 pagine01 Power TransformerKec M&BD0% (1)
- Programmable Metasurfaces: State of The Art and ProspectsDocumento5 pagineProgrammable Metasurfaces: State of The Art and ProspectsSam GreenNessuna valutazione finora
- MP Avt 306 18Documento10 pagineMP Avt 306 18nileshsmateNessuna valutazione finora
- Polar FS1/FS2c/FS3c: User ManualDocumento27 paginePolar FS1/FS2c/FS3c: User ManualStefan JaansonNessuna valutazione finora
- Ottlite Executive Desk Lamp ManualDocumento1 paginaOttlite Executive Desk Lamp ManualVlad75% (4)
- Skanray Corporate Brochure PDFDocumento24 pagineSkanray Corporate Brochure PDFNene SalazarNessuna valutazione finora
- Astell MXN475 AMA 260 Swiftlock 80-300 ManuallitreDocumento46 pagineAstell MXN475 AMA 260 Swiftlock 80-300 ManuallitreDASTOKER100% (2)
- Formal Research Paper Slideshow 075919Documento9 pagineFormal Research Paper Slideshow 075919Ivan Gabriel FortichNessuna valutazione finora
- Design and Simulation of H-Bridge Fed Direct TorquDocumento7 pagineDesign and Simulation of H-Bridge Fed Direct TorquUtkarsh PrakashNessuna valutazione finora
- Instruction Manual: Citizen Quartz Racing Combo With Electroluminescence Model No. JN7XXX Cal. No. C401Documento5 pagineInstruction Manual: Citizen Quartz Racing Combo With Electroluminescence Model No. JN7XXX Cal. No. C401emilasanovskiNessuna valutazione finora
- Li-Ion Battery User Manual (Hailong Type)Documento3 pagineLi-Ion Battery User Manual (Hailong Type)Toni MikelićNessuna valutazione finora
- SC 9100 JohnsonControlsDocumento19 pagineSC 9100 JohnsonControlsMohammad SaleemNessuna valutazione finora
- Theodore F. Bogart, Jr. Electronic Devises and Circuits. Fourth Edition. Prentice Hall.Documento16 pagineTheodore F. Bogart, Jr. Electronic Devises and Circuits. Fourth Edition. Prentice Hall.Nolverto Urias Obeso0% (3)
- Approaches To Non-Intrusive Load Monitoring (Nilm) in The HomeDocumento53 pagineApproaches To Non-Intrusive Load Monitoring (Nilm) in The HomeKalthoum ZaoualiNessuna valutazione finora
- Group Delay As I Understand It by JOHN ORAMDocumento2 pagineGroup Delay As I Understand It by JOHN ORAMDávid BaltaváriNessuna valutazione finora
- Tesys T - LT6CT2001Documento2 pagineTesys T - LT6CT2001Pethra BritoNessuna valutazione finora
- PCC/MCC Feeder Operation Check ListDocumento2 paginePCC/MCC Feeder Operation Check Listsuperthambi0% (1)
- Basic ElectronicsDocumento1 paginaBasic ElectronicsFarhan Ali CheemaNessuna valutazione finora
- WWW Mepits Com Tutorial 332 Avr 8051 How To Interface ComputDocumento11 pagineWWW Mepits Com Tutorial 332 Avr 8051 How To Interface ComputJavier ParedesNessuna valutazione finora
- Detection and Measurement of Partial Discharge (Corona) Pulses in Evaluation of Insulation SystemsDocumento10 pagineDetection and Measurement of Partial Discharge (Corona) Pulses in Evaluation of Insulation Systemskamran719Nessuna valutazione finora
- Modeling of Definite Time Over-Current Relay With Auto Re-Closer Using MATLABDocumento5 pagineModeling of Definite Time Over-Current Relay With Auto Re-Closer Using MATLABHayat Ansari100% (1)