Potrebbero piacerti anche
- Dinamica I Transformacion CoordenadasDocumento9 pagineDinamica I Transformacion Coordenadaskelcard10Nessuna valutazione finora
- Coordenadas EsfericasDocumento7 pagineCoordenadas EsfericasVládimir SōryūNessuna valutazione finora
- Derivada de Un Vector UnitarioDocumento9 pagineDerivada de Un Vector UnitarioRAMON ELIZARRARASNessuna valutazione finora
- Simetría Vibraciones PDFDocumento9 pagineSimetría Vibraciones PDFroyer barrosoNessuna valutazione finora
- Simetría Vibraciones PDFDocumento9 pagineSimetría Vibraciones PDFroyer barrosoNessuna valutazione finora
- Cinematic ADocumento59 pagineCinematic AMartin CaranguiNessuna valutazione finora
- Ingeniería de Control Moderna: Figura 3-26Documento4 pagineIngeniería de Control Moderna: Figura 3-26Fernando Paez MendizabalNessuna valutazione finora
- GRAFOS-Mate Discreta Con Video2Documento34 pagineGRAFOS-Mate Discreta Con Video2Maribel CoronacionNessuna valutazione finora
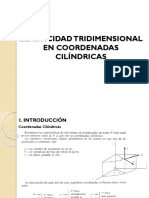
- AE3-T2 Elasticidad 3D CurvilineasDocumento24 pagineAE3-T2 Elasticidad 3D CurvilineasJuan Cruz TauterysNessuna valutazione finora
- 7 Funciones Trascendentes BasicasDocumento10 pagine7 Funciones Trascendentes BasicasChristian Calderón VilelaNessuna valutazione finora
- Resuelto Mecanica de Materiales AvanzadaDocumento3 pagineResuelto Mecanica de Materiales Avanzadaalexis salazarNessuna valutazione finora
- Física 4 - Fundamentos - de - Analisis - TensorialDocumento6 pagineFísica 4 - Fundamentos - de - Analisis - Tensorialsheldon bazingaNessuna valutazione finora
- Winkler BachDocumento7 pagineWinkler BachSofia AilinNessuna valutazione finora
- P Hechos Tema5Documento25 pagineP Hechos Tema5Carlos SorianoNessuna valutazione finora
- Apendice ADocumento4 pagineApendice AJULIETA PÉREZ GUEVARANessuna valutazione finora
- Suma - y - Resta - de - Vectores v6443Documento12 pagineSuma - y - Resta - de - Vectores v6443Alex GamerMasterNessuna valutazione finora
- Coeficiente de Reflexión en La CargaDocumento1 paginaCoeficiente de Reflexión en La Cargagatica2Nessuna valutazione finora
- Plano Osculador, TorsionDocumento18 paginePlano Osculador, TorsionAlexCore100% (1)
- Coordenadas Curvilineas (Teoría y Ejercicios) SchaumDocumento26 pagineCoordenadas Curvilineas (Teoría y Ejercicios) SchaumMiguel Mamani Castro100% (2)
- Ejercicios Resuelto de Campo Electrico y PotencialDocumento4 pagineEjercicios Resuelto de Campo Electrico y PotencialSoledad Ignacio FloresNessuna valutazione finora
- Dinámica CRDocumento90 pagineDinámica CRDayanne PettersenNessuna valutazione finora
- Fundamentos de Análisis TensorialDocumento7 pagineFundamentos de Análisis TensorialCarlos MayhuiriNessuna valutazione finora
- A Propiedades Estaticas Areas Planas v1Documento16 pagineA Propiedades Estaticas Areas Planas v1Tania Esmeralda González RoblesNessuna valutazione finora
- Semana05 VectoresDocumento29 pagineSemana05 VectoresJesús ADNessuna valutazione finora
- Trabajo Álgebra LinealDocumento1 paginaTrabajo Álgebra LinealYosoy GenialNessuna valutazione finora
- Unam 1 Introducción PARTE 3 de 5 AlumnosDocumento40 pagineUnam 1 Introducción PARTE 3 de 5 AlumnosVictor OrozcoNessuna valutazione finora
- Momentos y Ejes Principales InerciaDocumento7 pagineMomentos y Ejes Principales InerciaLucas BessoneNessuna valutazione finora
- Funciones ComplejasDocumento12 pagineFunciones ComplejasJosue UguñaNessuna valutazione finora
- Desigualdad de EulerDocumento13 pagineDesigualdad de Eulerpaulcesarfim6840Nessuna valutazione finora
- Vectores UnitariosDocumento12 pagineVectores UnitariosIan CardenasNessuna valutazione finora
- Ejercicio IntegradorDocumento4 pagineEjercicio IntegradorSantiago NoyaNessuna valutazione finora
- Orbitales Moleculares CiclobutadienoDocumento7 pagineOrbitales Moleculares CiclobutadienoMaria MartinezNessuna valutazione finora
- Vectores en r3Documento3 pagineVectores en r3Gustavo CuevaNessuna valutazione finora
- Co1 Producto Cartesiano 2 CopiarDocumento20 pagineCo1 Producto Cartesiano 2 CopiarMishel GualpaNessuna valutazione finora
- Reducción de 2 Rotaciones PDFDocumento4 pagineReducción de 2 Rotaciones PDFJose Luis Castañeda TerronesNessuna valutazione finora
- CAP 7 Coordenadas Orbital y Localización PDFDocumento25 pagineCAP 7 Coordenadas Orbital y Localización PDFSolNessuna valutazione finora
- CV Coordenadas EsféricasDocumento20 pagineCV Coordenadas EsféricasWalter GuillermoNessuna valutazione finora
- Ejercicios de ElectroDocumento6 pagineEjercicios de ElectroSamuelNessuna valutazione finora
- APÉNDICE A Posición de Un Mecanismo de Cuato Barras - Solución AnalíticaDocumento8 pagineAPÉNDICE A Posición de Un Mecanismo de Cuato Barras - Solución AnalíticaJulian OrtizNessuna valutazione finora
- Propiedades de Areas PlanasDocumento16 paginePropiedades de Areas PlanasCarolina HerreraNessuna valutazione finora
- Clase 1Documento61 pagineClase 1profjnapoles100% (1)
- Ejercicio 1Documento21 pagineEjercicio 1Christian FernandezNessuna valutazione finora
- Producto Academico 3 CarlosDocumento4 pagineProducto Academico 3 CarlosJENIFER MONICA PEREZ DURANDNessuna valutazione finora
- 4 Teoria de La Elasticidad 3Documento12 pagine4 Teoria de La Elasticidad 3Juan EstivillNessuna valutazione finora
- Orientación y RotaciónDocumento6 pagineOrientación y RotaciónAnonymous VtOVs5Nessuna valutazione finora
- Capitulo IIDocumento18 pagineCapitulo IICristhian Pablo LugoNessuna valutazione finora
- CuaternionesDocumento41 pagineCuaternionesMiguel PérezNessuna valutazione finora
- Actividad 8 - Formas de Representar Grafos y Árboles - EjerciciosDocumento16 pagineActividad 8 - Formas de Representar Grafos y Árboles - Ejerciciosmigueloc22Nessuna valutazione finora
- Segunda Practica Final de FinalesDocumento30 pagineSegunda Practica Final de FinalesDiego Chinguel JimenezNessuna valutazione finora
- Clase Semana 5 - Funciones BasicasDocumento146 pagineClase Semana 5 - Funciones BasicasWILMAN AYALA POMANessuna valutazione finora
- Cal Culo VectorialDocumento476 pagineCal Culo VectorialZimplementeLuizitha XD100% (1)
- Teoremas Fundamentales de Los CircuitosDocumento21 pagineTeoremas Fundamentales de Los CircuitosAlejandro FloresNessuna valutazione finora
- Arreglo de Cargas PuntualesDocumento3 pagineArreglo de Cargas PuntualesCésar Guerrero CorneNessuna valutazione finora
- Algebla Linea Luke PDFDocumento308 pagineAlgebla Linea Luke PDFAgustin GonzalesNessuna valutazione finora
- Análisis Cinemático Detallado Mecanismo RRRTDocumento6 pagineAnálisis Cinemático Detallado Mecanismo RRRTJaimeNessuna valutazione finora
- Ejercicios Resueltos Unidad IIIDocumento16 pagineEjercicios Resueltos Unidad IIIJeremy EnderNessuna valutazione finora
- Apendices A-E Fundamentos de Transferencia de Momento, Calor y MasaDocumento14 pagineApendices A-E Fundamentos de Transferencia de Momento, Calor y MasaALONDRA GUADALUPE AMARO GASCANessuna valutazione finora
- Primera Parte Problemas DinamicaDocumento1 paginaPrimera Parte Problemas DinamicaRAMON ELIZARRARASNessuna valutazione finora
- Genera Tu Propuesta de ValorDocumento22 pagineGenera Tu Propuesta de ValorRAMON ELIZARRARASNessuna valutazione finora
- Tercera Parte Problemas DinamicaDocumento1 paginaTercera Parte Problemas DinamicaRAMON ELIZARRARASNessuna valutazione finora
- Cuarta Parte Problemas DinamicaDocumento1 paginaCuarta Parte Problemas DinamicaRAMON ELIZARRARASNessuna valutazione finora
- Segunda Parte Problemas DinámicaDocumento1 paginaSegunda Parte Problemas DinámicaRAMON ELIZARRARASNessuna valutazione finora
- Quinta Parte Problemas DinamicaDocumento1 paginaQuinta Parte Problemas DinamicaRAMON ELIZARRARASNessuna valutazione finora
- Dinamica Practica 1Documento7 pagineDinamica Practica 1RAMON ELIZARRARASNessuna valutazione finora
- Ejemplos Capitulo 3B TermodinámicaDocumento6 pagineEjemplos Capitulo 3B TermodinámicaRAMON ELIZARRARASNessuna valutazione finora
- Tarea 2 - Calculo IntegralDocumento4 pagineTarea 2 - Calculo IntegralRAMON ELIZARRARASNessuna valutazione finora
- Problemas TermodinámicaDocumento2 pagineProblemas TermodinámicaRAMON ELIZARRARASNessuna valutazione finora
- Tipos de Fuerzas de AccionDocumento2 pagineTipos de Fuerzas de AccionRAMON ELIZARRARASNessuna valutazione finora
- Problemas Capitulo 8Documento1 paginaProblemas Capitulo 8RAMON ELIZARRARASNessuna valutazione finora
- Tarea 1 - Calculo IntegralDocumento2 pagineTarea 1 - Calculo IntegralRAMON ELIZARRARASNessuna valutazione finora
- Maneras para Calcular La Mediana - Datos AgrupadosDocumento3 pagineManeras para Calcular La Mediana - Datos AgrupadosRAMON ELIZARRARASNessuna valutazione finora
- Torsion de Barras Circulares ElasticasDocumento10 pagineTorsion de Barras Circulares ElasticasKaren Romero LopezNessuna valutazione finora
- TEMARIO - DIN-PartículaAD2019Documento1 paginaTEMARIO - DIN-PartículaAD2019RAMON ELIZARRARASNessuna valutazione finora
- Conceptos y Datos Cicuitos Electricos y Electronicos PDFDocumento1 paginaConceptos y Datos Cicuitos Electricos y Electronicos PDFRAMON ELIZARRARASNessuna valutazione finora
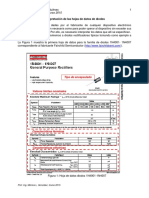
- Hojas Datos de DiodosDocumento6 pagineHojas Datos de DiodosAnder UrtamNessuna valutazione finora
- Lce1p6a Inv06Documento4 pagineLce1p6a Inv06RAMON ELIZARRARASNessuna valutazione finora
- Torsion de Barras Circulares ElasticasDocumento10 pagineTorsion de Barras Circulares ElasticasKaren Romero LopezNessuna valutazione finora
- Problemas Meanica de SolidosDocumento5 pagineProblemas Meanica de SolidosRAMON ELIZARRARASNessuna valutazione finora
- Problemas DinamicaDocumento1 paginaProblemas DinamicaRAMON ELIZARRARASNessuna valutazione finora
- Lce1p6b Inv06Documento3 pagineLce1p6b Inv06RAMON ELIZARRARASNessuna valutazione finora
- Calendario Agosto DiciembreDocumento5 pagineCalendario Agosto DiciembreRAMON ELIZARRARASNessuna valutazione finora
- Tarea de ProbabilidadDocumento6 pagineTarea de ProbabilidadRAMON ELIZARRARASNessuna valutazione finora
- Ejercicios TermoDocumento1 paginaEjercicios TermoRAMON ELIZARRARASNessuna valutazione finora
- Tutor Latex BeamerDocumento36 pagineTutor Latex BeamerEdwin Torres CNessuna valutazione finora
- Tarea 1 - Ecuaciones DiferencialesDocumento1 paginaTarea 1 - Ecuaciones DiferencialesRAMON ELIZARRARASNessuna valutazione finora
- Recomendaciones de Seguridad IntegralDocumento22 pagineRecomendaciones de Seguridad IntegralKevin Gustavo PantojaNessuna valutazione finora
- Arte de BeberDocumento186 pagineArte de Beberalvarodominguez100% (1)
- Investigación U2 - Manufactura AvanzadaDocumento37 pagineInvestigación U2 - Manufactura AvanzadaDiana JiménezNessuna valutazione finora
- Sesion 1 REL - 5 - UNIDADDocumento3 pagineSesion 1 REL - 5 - UNIDADAlberto GinesNessuna valutazione finora
- Plan de Estudios Bachillerato Filosofía 9-11Documento15 paginePlan de Estudios Bachillerato Filosofía 9-11Alexander HernándezNessuna valutazione finora
- Ciencia e InvestigacionDocumento92 pagineCiencia e InvestigacionDavid TerranovaNessuna valutazione finora
- Logros de La CruzDocumento4 pagineLogros de La Cruzgabriel adarveNessuna valutazione finora
- Ejercicio Matrices y Subsidiarias Mon LocalDocumento1 paginaEjercicio Matrices y Subsidiarias Mon LocalFRANK SERECHNessuna valutazione finora
- Matriz de Evaluación Tutoria 1° 2019 IbimestreDocumento4 pagineMatriz de Evaluación Tutoria 1° 2019 IbimestreEdwin Romero75% (4)
- Trim CecointDocumento174 pagineTrim Cecointpedro garciaNessuna valutazione finora
- Manual de Planta Productora de AmoniacoDocumento24 pagineManual de Planta Productora de AmoniacoThane BotticelliNessuna valutazione finora
- All-Products Esuprt Laptop Esuprt Latitude Laptop Latitude-2120 Service Manual Es-MxDocumento62 pagineAll-Products Esuprt Laptop Esuprt Latitude Laptop Latitude-2120 Service Manual Es-MxRonny FulcadoNessuna valutazione finora
- Proyecto 1 Actividad 1 - Informe Idea de NegocioDocumento12 pagineProyecto 1 Actividad 1 - Informe Idea de NegocioCocinas InducamNessuna valutazione finora
- Charla de 5 Minutos - Semana 38Documento5 pagineCharla de 5 Minutos - Semana 38MaferVanOordtRocaZelaNessuna valutazione finora
- Clase Principios UnescoDocumento23 pagineClase Principios Unescoloreto riquelmeNessuna valutazione finora
- Mo Indicadores PerspectivaDocumento29 pagineMo Indicadores PerspectivaNicole DelgadoNessuna valutazione finora
- Calculo de EdadDocumento4 pagineCalculo de EdadMarcelo RamosNessuna valutazione finora
- Resumen BialostockiDocumento6 pagineResumen BialostockiRosa GutiérrezNessuna valutazione finora
- Seguridad Vial en EuropaDocumento7 pagineSeguridad Vial en EuropaTatiana JiménezNessuna valutazione finora
- CARBONELL-Logística y Productividad en ConstrucciónDocumento12 pagineCARBONELL-Logística y Productividad en Construcciónalejandro carbonellNessuna valutazione finora
- Linea TiempoDocumento1 paginaLinea TiempoMonica Munoz HNessuna valutazione finora
- Cuaderno Pre KinderDocumento45 pagineCuaderno Pre KinderMary QuezadaNessuna valutazione finora
- Tesis Impresion CeramicaDocumento92 pagineTesis Impresion CeramicaVictor TufinioNessuna valutazione finora
- GUÍA No 2 - Medidas de Tendencia Central y Dispersión - RRR PDFDocumento6 pagineGUÍA No 2 - Medidas de Tendencia Central y Dispersión - RRR PDFOrlando K'rmona Martinez100% (1)
- Test de ParejaDocumento25 pagineTest de ParejaMiriam Díaz de León83% (6)
- Sistema Operativo IDocumento34 pagineSistema Operativo IRenato RamirezNessuna valutazione finora
- Eportfolio - Mahara Desde La ExperienciaDocumento240 pagineEportfolio - Mahara Desde La ExperienciaNagore Ipiña LarrañagaNessuna valutazione finora
- Antologia-Poetica-Lucía Sánchez SaornilDocumento47 pagineAntologia-Poetica-Lucía Sánchez SaornilJuan Manuel HurtadoNessuna valutazione finora
- Memoria Descriptiva - ArquitecturaDocumento3 pagineMemoria Descriptiva - Arquitecturalucho champi quispeNessuna valutazione finora
- Derecho LaboralDocumento118 pagineDerecho LaboralsecretariotecnicobplpNessuna valutazione finora