Documenti di Didattica
Documenti di Professioni
Documenti di Cultura
Laboratorio # 3
Caricato da
Ana Luisa GarridoCopyright
Formati disponibili
Condividi questo documento
Condividi o incorpora il documento
Hai trovato utile questo documento?
Questo contenuto è inappropriato?
Segnala questo documentoCopyright:
Formati disponibili
Laboratorio # 3
Caricato da
Ana Luisa GarridoCopyright:
Formati disponibili
lOMoARcPSD|3138417
L02-Guia Laboratorio 2
Redes de computadoras (Pontificia Universidad Católica del Perú)
StuDocu no está patrocinado ni avalado por ningún colegio o universidad.
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
FACULTAD DE CIENCIAS E INGENIERÍA
SECCIÓN DE INGENIERÍA MECÁNICA
ÁREA DE MECATRÓNICA
CONTROL AUTOMÁTICO
LABORATORIO Nº 2
CONTROL DE PROCESOS INDUSTRIALES
Y SIMULINK
LIMA, 2018
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Laboratorio Nº 2
Control de Procesos Industriales y Simulink
1. Objetivos:
Identificar los elementos de un sistema de control de procesos usando
las plantas modelo de flujo, temperatura, presión y desalinizadora
existentes en el laboratorio.
Verificar la función que cumplen los elementos de un sistema de
control dentro de un lazo cerrado de control.
Entender el funcionamiento de un sistema de control de procesos
industriales mediante la lectura de diagramas de instrumentación y
tuberías (P&ID).
Emplear el software de simulación orientado al análisis y sistemas de
control automático Simulink
2. Materiales y equipos:
Planta modelo de flujo
Planta modelo de temperatura
Planta modelo de presión
Planta modelo desalinizadora
Computadoras con software Simulink instalado
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Fundamentos Teóricos
Sistemas de Control
Un sistema de control está formado por una serie de instrumentos y mecanismos que
reciben y envían información por medio de señales eléctricas o neumáticas. Los
elementos de un sistema de control interactúan en lazos de control para obtener
resultados útiles (regulación, seguimiento, ON/OFF, etc.) con supervisión humana
mínima. La ilustración 1 muestra el diagrama de bloques de un lazo de control típico.
Ilustración 1. Diagrama de bloques de un lazo de control típico.
Set Point (SP): Es la magnitud del valor deseado que el controlador utiliza como
referencia para mantener la PV igual a dicha magnitud.
Control Variable (CV): Es la variable que genera un cambio en el proceso y, por ende,
en la PV. La acción de control recae directamente sobre el actuador. Ejemplo:
porcentaje de apertura, voltaje, frecuencia, etc.
Process Variable (PV): Es la variable que indica la magnitud de una propiedad del
sistema, la planta o proceso que se desea controlar. Ejemplo: presión, nivel,
temperatura, flujo, etc.
En todo lazo de control se requiere de cuatro elementos básicos como son el sensor, el
actuador, el controlador y la planta o proceso; y tres señales principales que son SP, PV
y CV. El funcionamiento del lazo de control realimentado negativamente requiere medir
la respuesta PV por medio de un elemento sensor-transmisor, el cual convierte la PV
(caudal, nivel, presión, temperatura, etc.) en una señal eléctrica para poder ser procesada
y comparada con la señal de referencia o valor deseado (SP). La diferencia entre la PV y
la SP genera una señal de error (E=SP-PV), la cual es procesada por el controlador.
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Dependiendo de la señal de error, el controlador emite una señal CV para modificar la
planta o proceso, a través de un actuador, y por consiguiente en el valor de PV. Esta
serie de acciones se realizan continuamente hasta alcanzar valores de error mínimos.
En la ilustración 2 se muestra el diagrama de control de un intercambiador de calor. La
variable del proceso (PV) es la temperatura. En el lazo de temperatura, se mide y
transmite (hacia el controlador) el valor de la temperatura a la salida del intercambiador.
También se realizan mediciones del flujo y la temperatura al ingreso del intercambiador
de calor. A partir de estas informaciones el controlador enviará una señal CV al
actuador que abrirá o cerrará la válvula de la línea de vapor que está a altas
temperaturas. De esta menara se consigue que el flujo que ingresa al intercambiador se
mantenga a un valor deseado de temperatura a su salida.
Ilustración 2. Diagrama del control de temperatura en un intercambiador de calor
El controlador FRC solo puede recibir y enviar señales eléctricas de 4-20 mA (estándar
industrial). Para poder interactuar con la válvula de control neumática requiere de un
transductor que convierte proporcionalmente la señal eléctrica de 4-20 mA al rango
neumático de 3-15 psi. Todos los sensores TE, FET y TET miden las variables de la
planta con señales electromagnéticas y se comunican a otros dispositivos (output) por
señales eléctricas.
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Toda esta información está contenida en la ilustración 2 que sigue las normas ISA
(International Society of Automation) para los diagramas P&ID (Piping and
Instrumentation Diagram).
Diagramas P&ID
“Un diagrama que muestra la interconexión de equipos de proceso e instrumentos
utilizados para controlar el proceso. En la industria de procesos, un conjunto estándar
de símbolos se utiliza para preparar los dibujos de los procesos. El instrumento de
símbolos utilizados en estos dibujos se basa generalmente en Sistemas de
Instrumentación y Automatización de la Sociedad (ISA) Norma S5.1.”
Cada elemento independiente en un proceso se representará según la tabla 1. La mayoría
de sensores y actuadores se representan por círculos. La línea divisoria del símbolo
brinda información de la ubicación del elemento en el proceso industrial: sin línea, el
equipo está montado en campo; con línea continua, el equipo está en montado tablero;
con doble línea, en ubicación auxiliar; y con línea discontinua, se encuentra fuera del
alcance del operario.
Tabla 1. Tabla de símbolos de los instrumentos den un diagrama P&ID
Los PLC se representan con un rombo, mientras que las computadoras con un
hexágono.
Si el elemento está dentro de un cuadrado, significa que comparte el display o control.
Identificación
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Al interior de los símbolos de un P&ID hay códigos alfanuméricos que aportan
información sobre las funciones de los instrumentos o del lazo de control al cual
pertenecen, tal como se muestra en la ilustración 3.
FIC Identificación funcional
101 Identificación de lazo
Ilustración 3. Códigos alfanuméricos de los instrumentos P&ID
La primera letra del código funcional representa la variable medida o modificada. La
segunda letra indica la función pasiva o secundaria en caso la etiqueta contenga tres
caracteres, caso contrario representa la función o acción principal del instrumento. Solo
en caso de que haya una tercera letra (leído de izquierda a derecha), esta última letra
representa la función o acción principal del instrumento. El significado de las letras
puede consultarse en la tabla 2. Los números indican pertenencia al lazo de control. La
ilustración 4 muestra dos ejemplos de instrumentos.
Ilustración 4. Ejemplos de instrumentos discretos en un P&ID
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Tabla 2. Tabla de significado de las letras según norma ANSI/ISA S5.1-S5.3
1° Letra Letras sucesivas
Letra Variable Medida Función de lectura Función de Letra de
pasiva Salida Modificación
A Análisis Alarma
B Combustión
C Conductividad, Regulación (ON-OFF) Control
concentración
D Densidad, Peso
especifico
E Voltaje Sensor
F Flujo
G Calibre Vidrio
H Manual Alarma de alta
I Corriente Eléctrica Indicación (indicador)
J Potencia
Estación de
K Tiempo Control
L Nivel Luz Piloto Alarma de baja
Medio o
M Humedad intermedio
N Libre a elección
O Orificio
Punto de prueba o
P Presión o vacío conexión
Q Cantidad
R Radiactividad Registro
S Velocidad o frecuencia Interruptor
T Temperatura Transmisor
U Multivariable Multifunción Multifunción Multifunción
V Viscosidad Válvula
W Peso o Fuerza Vaina
X Libre a elección Libre a elección Libre a elección Libre a elección
Evento, Estado, Relé,
Y Presencia Computadora
Actuador,
Z Posición Manejador
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Líneas y Señales
El tipo de línea indica el tipo de señal o cómo están conectados los distintos
instrumentos de un P&ID como se muestra a continuación.
Conectado al proceso, o enlace mecánico, o alimentación de
instrumentos
Señal neumática
Señal eléctrica
Señal eléctrica (alternativo)
Tubo capilar
Señal sonoro o electromagnética guiada (incluye calor, radio,
nuclear, luz)
Señal sonora o electromagnética no guiada
Conexión de software o datos
Conexión mecánica
Señal hidráulica
Fuentes de Alimentación
Se sugieren las siguientes abreviaciones para representar el tipo de alimentación o purga
de los instrumentos:
AS: Air Supply. Ejemplo: SA-100: Aire a 100 psi
ES: Electric Supply. Ejemplo: ES-24CD: Alimentación de 24V de corriente continua.
GS: Gas Supply
HS: Hydraulic Supply
NS: Nitrogen Supply
SS: Steam Supply
WS: Water Supply
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Transductores
Dado que en un proceso industrial intervienen distintos tipos de señales, se requiere
frecuentemente de transductores que cambien el tipo de señal para poder comunicar los
instrumentos adecuadamente. El símbolo que se usa en P&ID de un transductor es el
que muestra la ilustración 5. La tabla 3 presenta el significado de las letras en un
transductor.
Tabla 3. Posibles letras y sus significados
para un transductor
Ilustración 5. Transductor. En I
va la variable de entrada (input)
y en la casilla O, la variable
convertida o de salida (output)
Actividad Práctica
En el laboratorio existe cuatro plantas modelo. Cada planta controla una de las
siguientes variables: Presión, Flujo, Temperatura y conductividad. Todas las plantas
cuentan con un controlador de lazo cerrado y un registrador gráfico. Las plantas están
diseñadas a escala y cuentan con sensores y actuadores reales.
Las plantas están interconectadas de modo tal que el agua usada por una de ellas puede
fluir por la otra. Las plantas cuentan con válvulas neumáticas proporcionales
(actuadores); para poder manipular estas válvulas se requiere de convertidores de
corriente a presión. Además las plantas cuentan con válvulas ON/OFF para simular
perturbaciones o fugas.
El color de las tuberías indica las variables involucradas, por ejemplo tenemos lo
siguiente:
Verde claro: Variable manipulada
Verde oscuro: Flujo de agua
Azul: Aire
Marrón: Drenaje
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Planta de Control de Flujo
En esta planta se controla el flujo de agua, que pasa por una tubería, mediante una
válvula proporcional. Una bomba proporciona el caudal de agua que pasa primero por
un rotámetro, que indica el flujo de agua; luego pasa por el sensor de flujo; y,
finalmente, por la válvula proporcional que regula el flujo de agua. El controlador cierra
el lazo con las señales del sensor y da la orden a la válvula. El P&ID se muestra en la
ilustración 6.
Ilustración 6. P&ID de la planta modelo de control de flujo
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
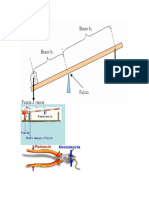
Planta de Control de Temperatura
En esta planta se controla la temperatura del agua a la salida de un intercambiador de
calor. Una bomba proporciona un flujo de agua de un tanque de agua caliente. La
temperatura del agua de este tanque es regulada a través de un sistema de resistencias
eléctricas. Una segunda bomba proporciona un flujo de agua fría al intercambiador de
placas. La temperatura transferida es controlada por una válvula proporcional que regula
el ingreso de agua caliente al intercambiador. La ilustración 7 muestra el P&ID de la
planta.
CONTROL DE TEMPERATURA
DIAGRAMA DE INSTRUMENTACIÓN
1-5VDC
TET 4-20mA TIC TIR
201 201 201
Manómetro 4-20mA
LET Presostato
201
I E
TY 4-20mA
201 4-20mA
I P 1-5VDC
FY
4-20mA TIC TIR
Tanque 202 202 202
FI de agua 3-15psi 4-20mA
201 caliente
Variador de
Indicador frecuencia
FI Turbina
202
TT
FV
201
202
TT
202
A FIT
202
E TT
F 201
FI
202 TT
C 201
B
D
TANQUE SUMINISTRO TANQUE
DE AGUA FRÍA DRENAJE
Alimentación
de agua fría
Drenaje
Ilustración 7. P&ID de la planta modelo de control de temperatura.
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Planta Desalinizadora por ósmosis inversa
En esta planta se controla las variables “caudal del permeado” y “conductividad del
permeado” mediante la manipulación de las variables “presión de la alimentación” y
“pH de la alimentación”, respectivamente. Esta planta cuenta con diversos instrumentos
de tecnología actual. La ilustración 8 muestra el Diagrama Funcional Completo de la
planta.
Ilustración 8. Diagrama Funcional Completo de la planta desalinizadora.
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Planta de Control de Presión
En esta planta se controla la presión de aire dentro de un tanque con agua, mediante una
válvula neumática proporcional que regula el ingreso de aire a dicho tanque. El aire
pasa primero por un rotámetro, luego por la válvula neumática y finalmente al tanque
con agua, donde se mide la presión interior. Un sensor de presión indica la presión de
aire en el interior del tanque. El control es por realimentación negativa, con un lazo PID.
La ilustración 9 muestra el P&ID de la planta.
Ilustración 9. P&ID de la planta modelo de control de presión.
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Introducción a Simulink®
“Simulink® es un entorno de diagramas de bloque para la simulación multidominio y el
diseño basado en modelos. Admite el diseño y la simulación a nivel de sistema, la
generación automática de código y la prueba y verificación continuas de los sistemas
embebidos.
Simulink ofrece un editor gráfico, bibliotecas de bloques personalizables y solvers para
modelar y simular sistemas dinámicos. Se integra con MATLAB®, lo que permite
incorporar algoritmos de MATLAB en los modelos y exportar los resultados de la
simulación a MATLAB para llevar a cabo más análisis. “(MathWorks, 2014).
Dentro de las funcionalidades que ofrece Simulink destacan las siguientes:
Creación de modelos
Simulación de modelos
Análisis de los resultados de la simulación
Gestión de proyectos
Conexión con hardware
Para acceder a Simulink desde Matlab, bastará con hacer clic en el icono encerrado en
círculo rojo de la figura 1; o escribir en el Simulink command window y presionar la
tecla enter.
Figura 1. Accediendo a Simulink desde MatLab
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Para crear un nuevo modelo, se debe hacer clic en File>>New>>Model. También se
puede crear un nuevo modelo con el atajo de las teclas Ctrl+N o haciendo clic en el
icono de hoja en blanco.
Simulink cuenta con una gran cantidad de
librerías y Toolboxes para aplicaciones
específicas. Para poder acceder a las librerías
basta con usar el buscador (encerrado en
círculo rojo) o desplazarse por el árbol
próximo a la flecha roja, tal como se aprecia
en la figura 2.
Para los fines del curso, las librerías que
usaremos son Continuos, Math Operations,
Signal Routing, Sink y Sources. Dentro de
estas librerías encontraremos bloques que nos
permitirán crear nuestros modelos, las cuales
se aprecian en la figura 5.
Para poder añadir un bloque funcional a
nuestro modelo, se debe ubicar el bloque en
la librería correspondiente, clic derecho y clic
en add to untitled (en este caso nuestro
modelo no tiene nombre) como se muestra en
la figura 3. También es posible añadir el
bloque de interés a nuestro modelo haciendo
clic izquierda sobre el bloque y arrastrándolo
a la zona de modelamiento.
Figura 2. Ventana principal de Simulink.
Antes de continuar con el modelamiento es importante guardar nuestro trabajo. Para
guardar un modelo se hace clic en file luego en save as, se elige la ruta donde se desea
guardar y clic en guardar. Recuerde que los nombres de los archivos en Simulink siguen
las mismas reglas que en Matlab.
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Figura 3. Añadiendo bloques a nuestro modelo
Figura 4. Guardando nuestro modelo
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Figura 5. Principales librerías que se usarán en las sesiones de laboratorio
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Simulink como solver
Ejercicio 1
Resolver la siguiente ecuación:
El input de la ecuación anterior es mientras que el output corresponde a la
solución de la ecuación diferencial x(t). Usando Simulink, seguimos la solución dado
por la figura 6.
Figura 6. Solución al ejercicio 1
Para la solución se requiere de un bloque Sine Wave de la librería Sources, un bloque
Integrator de la librería Continuous y un bloque Scope de la librería Sinks. Los bloques
se deben conectar arrastrando el mouse sin dejar de presionar el clic izquierdo como se
muestra en la sección derecha debajo de la figura 7.
Del mismo modo, se deben cambiar las condiciones iniciales en el bloque Intregrator
haciendo doble clic y cambiar el valor de Initial Condition por -2 como se muestra en la
figura 9.
Para iniciar la simulación se debe hacer clic en Simulation>>Start o hacer clic en el
botón play encerrado en círculo rojo en la figura 10.
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Figura 7. Solución al ejercicio 1 desde Simulink
Figura 8. Configuración de los parámetros Figura 9. Configuración de las condiciones
de entrada. iniciales.
Figura 10. Iniciar una simulación en Simulink
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Haciendo doble clic en el bloque Scope, luego de la simulación, se obtiene la respuesta
como se muestra en la figura 11.
Figura 11. Respuesta al ejercicio 1
Ejercicio 2
Resolver la siguiente ecuación diferencial con Simulink
Con m=0.4, c=0.6, k=1
La solución al problema anterior es de la forma que se muestra en la figura 12.
Figura 12. Solución al ejercicio 2
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Simulink aplicado a Control Automático
Hasta ahora hemos usado Simulink netamente como un solver para ecuaciones
diferenciales; sin embargo, en adelante primero hallaremos la función de transferencia
del sistema, luego construiremos el modelo del sistema en Simulink para su posterior
simulación frente a las distintas entradas y sus respuestas respectivas.
Ejercicio 3
Hallar la función de transferencia del siguiente sistema masa-resorte mostrado en la
figura 13
Figura 13. Sistema masa-resorte
La función de transferencia será la siguiente:
Datos: m= 1 Kg b=10 Ns/m k= 20 N/m F(s) =1 N
Se debe usar el bloque Transfer Fcn de la librería Continuous y el bloque Constant de la
librería Sources. La respuesta del sistema está dada por la línea amarilla de la gráfica en
la figura 14.
Figura 14. Respuesta del sistema a una constante
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Como se aprecia el sistema no logra llegar a seguir la función de entrada. Obsérvese la
respuesta al sistema al agregarle una ganancia de 15, mejora notablemente como se
aprecia en la figura 15.
Figura 15. Sistema masa-resorte con ganancia 15
Es por ello que en los sistemas de control automático la primera estrategia de control es
la proporcional.
Ejercicio 4
Sea la siguiente función de transferencia, hallar la respuesta en lazo abierto frente a un
escalón unitario como entrada.
La solución se muestra en la figura 16.
Figura 16. Respuesta al escalón unitario como entrada al sistema FT en lazo abierto.
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Modelar la misma FT pero en lazo cerrado y compararla con un control proporcional de
ganancia 5 y con un controlador PID con función de transferencia siguiente:
.Con k=1 y Ti=0.5
Los resultados se muestran en la figura 17
Figura 17. Resultados de la simulación de un mismo sistema con distintos tipos de control
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
lOMoARcPSD|3138417
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
SECCIÓN DE INGENIERÍA MECÁNICA
Bibliografía
MATHWORKS
2014, Simulink
< http://www.mathworks.es/es/help/simulink/ >Fecha de consulta: agosto del 2014
LARA, Pamela
Dinámica y Control de Procesos. Universidad de Santiago de Chile
ATAURINA A., Miguel
Matlab y Simulink para Ingeniería. Universidad de Ciencias y Humanidades
ARCE R., Alice, Vianna R., Guilherme
Teoría de Sistemas. Escuela Superior de Ingenieros. Universidad de Sevilla
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
2012, Laboratorio 2 – Control de Procesos Industriales y Programa de Simulación
(Matlab-Simulink).
MEC284 – Laboratorio de Control Automático
Descargado por Anibal Vp (anibalvp1993@hotmail.com)
Potrebbero piacerti anche
- AdmDocumento11 pagineAdmAna Luisa GarridoNessuna valutazione finora
- SobrevivenciaDocumento5 pagineSobrevivenciaAna Luisa GarridoNessuna valutazione finora
- Asignación #1Documento1 paginaAsignación #1Ana Luisa GarridoNessuna valutazione finora
- Publicidad - Participantes ClavesDocumento10 paginePublicidad - Participantes ClavesAna Luisa GarridoNessuna valutazione finora
- Entre VistaDocumento1 paginaEntre VistaAna Luisa GarridoNessuna valutazione finora
- La AsambleaDocumento17 pagineLa AsambleaAna Luisa GarridoNessuna valutazione finora
- La AsambleaDocumento17 pagineLa AsambleaAna Luisa GarridoNessuna valutazione finora
- Maquinas SimplesDocumento18 pagineMaquinas SimplesAna Luisa GarridoNessuna valutazione finora
- Pantanos de VillaDocumento3 paginePantanos de Villacindy ñavincopaNessuna valutazione finora
- D y G de La Pared CelularDocumento22 pagineD y G de La Pared CelularDeyvis Ubaldo YaurivilcaNessuna valutazione finora
- Manual Camporee Misión Norte Enoc2016Documento36 pagineManual Camporee Misión Norte Enoc2016JAcampamentosMisionorteNessuna valutazione finora
- Masa IntercicloDocumento8 pagineMasa IntercicloXavi VelezNessuna valutazione finora
- Economizador y Precalentador de AireDocumento34 pagineEconomizador y Precalentador de AireJohann Manuel Londoño Reyes100% (2)
- Proyectojabondeavena 130805151633 Phpapp01Documento13 pagineProyectojabondeavena 130805151633 Phpapp01alfa27Nessuna valutazione finora
- Presentación Desarrollo Comunitario-2Documento38 paginePresentación Desarrollo Comunitario-2Juan Carlos Soliz QNessuna valutazione finora
- Petroland S.A.S: ModificacionesDocumento15 paginePetroland S.A.S: ModificacionesLaura Daniela Ruíz LópezNessuna valutazione finora
- Ficha Tecnica de Golden Sea Artemia SUMACUADocumento1 paginaFicha Tecnica de Golden Sea Artemia SUMACUAFernando RiveraNessuna valutazione finora
- RN 3 S6 B NTD ETNofg at D1 SHAx PT5 QPIit LDocumento3 pagineRN 3 S6 B NTD ETNofg at D1 SHAx PT5 QPIit LAnibal CunoNessuna valutazione finora
- ECP-DHS-F-100 Identificación de Aspectos e Impactos Ambientales PTARIDocumento5 pagineECP-DHS-F-100 Identificación de Aspectos e Impactos Ambientales PTARIYomary AtuestaNessuna valutazione finora
- Recomendaciones Sanitarias para La Preparacion de Alimentos en Olla Comun PDFDocumento1 paginaRecomendaciones Sanitarias para La Preparacion de Alimentos en Olla Comun PDFArce MarcovichNessuna valutazione finora
- BPM IcbfDocumento21 pagineBPM Icbfivan saenzNessuna valutazione finora
- Proyecto TermodinamicaDocumento28 pagineProyecto TermodinamicaJoel SantosNessuna valutazione finora
- Alteraciones Microbiológicas en AlimentosDocumento6 pagineAlteraciones Microbiológicas en AlimentosWendy HueblaNessuna valutazione finora
- Diseño de DesarenadorDocumento7 pagineDiseño de DesarenadorWilson Gutierrez CuevaNessuna valutazione finora
- Hds Taurus Xti 15w40 Ci-4Documento6 pagineHds Taurus Xti 15w40 Ci-4Felipe Schönffeldt TorresNessuna valutazione finora
- Biocidas NaturalesDocumento6 pagineBiocidas Naturalessallavor.orgNessuna valutazione finora
- Hidrología UchuhuaytaDocumento18 pagineHidrología UchuhuaytaRuth OlivasNessuna valutazione finora
- Resoluciones de Jefatural 2017 MDTDocumento277 pagineResoluciones de Jefatural 2017 MDTBenny Jauregui HuaringaNessuna valutazione finora
- Alta Carga Orgánica en Registro Pluvial PM-09 (Salida de Agua Pluvial de La Planta Oxido de Etileno y Glicoles) en El Mes de Febrero de 2020Documento27 pagineAlta Carga Orgánica en Registro Pluvial PM-09 (Salida de Agua Pluvial de La Planta Oxido de Etileno y Glicoles) en El Mes de Febrero de 2020Jose Rafael Macfu SuarezNessuna valutazione finora
- Sistema AproferrolDocumento69 pagineSistema AproferrolLisset Flores RodriguezNessuna valutazione finora
- RepasoDocumento2 pagineRepasoRodrigo Mozo PizarroNessuna valutazione finora
- Articulo Academico - Hidrolog-03Documento9 pagineArticulo Academico - Hidrolog-03Adams S. Shijap ChavezNessuna valutazione finora
- Interpretación Del Decreto 1521Documento87 pagineInterpretación Del Decreto 1521ᕱᕱᗋᖇᓾᗅ ᙍᕠNessuna valutazione finora
- Microsoft Word - Desinfeccion - en - Casa - Sin - Casos - ESP - May - 28 - COVIDDocumento2 pagineMicrosoft Word - Desinfeccion - en - Casa - Sin - Casos - ESP - May - 28 - COVIDAnnie ValenzuelaNessuna valutazione finora
- Gestión Del Uso de Aguas Residuales Urbanas Tratadas en Agricultura en Mendoza, ArgentinaDocumento24 pagineGestión Del Uso de Aguas Residuales Urbanas Tratadas en Agricultura en Mendoza, ArgentinaRoque Feller Quintana CordovaNessuna valutazione finora
- Catalogo TurbinasDocumento8 pagineCatalogo TurbinasAlexis ValleNessuna valutazione finora
- Proceso Químico AnaliticoDocumento4 pagineProceso Químico AnaliticoBryan Giovanny Vasquez FrancoNessuna valutazione finora
- Ambientico 174 Marina Puerto ViejoDocumento15 pagineAmbientico 174 Marina Puerto ViejoZuiri MendezNessuna valutazione finora