Potrebbero piacerti anche
- Malos Habitos Orales AficheDocumento1 paginaMalos Habitos Orales Aficheanon_760783521Nessuna valutazione finora
- Tubo Alcantarillado Parcialmente Lleno - ManningDocumento4 pagineTubo Alcantarillado Parcialmente Lleno - ManningOrlando RíosNessuna valutazione finora
- De Libras A KilogramosDocumento1 paginaDe Libras A KilogramosmarielcapitanNessuna valutazione finora
- Tabla de Cubicacion 2021 - Emgesa Sac - D1.90Documento5 pagineTabla de Cubicacion 2021 - Emgesa Sac - D1.90Fanco M Rsll GranDuque Del InfiernoNessuna valutazione finora
- TABLA 3 Distribución Chi CuadradoDocumento1 paginaTABLA 3 Distribución Chi CuadradoPariss TaylorNessuna valutazione finora
- Bloques AlternadosDocumento4 pagineBloques AlternadosDaniel VillarrealNessuna valutazione finora
- 38 Tabla Distribucion Ji CuadradaDocumento1 pagina38 Tabla Distribucion Ji CuadradaAndres Washington Muggi CisnerosNessuna valutazione finora
- Tabla Factoresde Capacidad de Carga TerzaghiDocumento2 pagineTabla Factoresde Capacidad de Carga Terzaghialessandro100% (2)
- Costeo de NominaDocumento8 pagineCosteo de NominaNan MartinezNessuna valutazione finora
- Angulos Compuestos MaderaDocumento1 paginaAngulos Compuestos MaderapttunoNessuna valutazione finora
- Tabla de Cuantía, Fy 4200 F'C 300Documento1 paginaTabla de Cuantía, Fy 4200 F'C 300J CanoNessuna valutazione finora
- Terraplenes Alcantarilla SeccionalDocumento4 pagineTerraplenes Alcantarilla SeccionalRaymundoNessuna valutazione finora
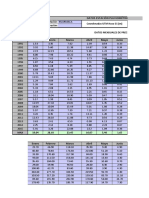
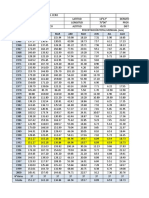
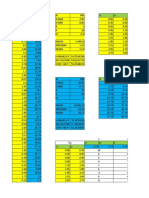
- Copia de SUMAS MENSUALES (Recuperado Automáticamente)Documento1.519 pagineCopia de SUMAS MENSUALES (Recuperado Automáticamente)anthonysolorzano234Nessuna valutazione finora
- Deberes Estadistica 01-1Documento13 pagineDeberes Estadistica 01-1Blanca japonNessuna valutazione finora
- Propiedades Del Aire (Celcius)Documento2 paginePropiedades Del Aire (Celcius)Toni2231Nessuna valutazione finora
- Tabla para Factor de SeguridadDocumento1 paginaTabla para Factor de SeguridadPedro GuevaraNessuna valutazione finora
- Propiedades de Perfiles 2Documento5 paginePropiedades de Perfiles 2Eduardo C SanNessuna valutazione finora
- Tabla de AcerosDocumento1 paginaTabla de AcerosAbel Alfredo Calle YucraNessuna valutazione finora
- 2017-Cso-Composite-Ultimate-Table ANBDocumento6 pagine2017-Cso-Composite-Ultimate-Table ANBJeannette RodriguezNessuna valutazione finora
- Interllegadas BUS - Simulación de ProcesosDocumento4 pagineInterllegadas BUS - Simulación de ProcesosAidé Castillo0% (1)
- ProblemasDocumento108 pagineProblemasKathy AguileraNessuna valutazione finora
- Càlculo de Volúmenes A Enero de 2022Documento6 pagineCàlculo de Volúmenes A Enero de 2022Jimmy mora foreroNessuna valutazione finora
- Alcantarillado TablasDocumento10 pagineAlcantarillado TablasMORALES HERNANDEZ LUIS FERNANDO INGENIER�A CIVILNessuna valutazione finora
- Paso 4 Karen GarcíaDocumento81 paginePaso 4 Karen GarcíaKarina Lizarazo badilloNessuna valutazione finora
- Diseño de Puentes - CN GraficoDocumento14 pagineDiseño de Puentes - CN GraficoJhon Rodríguez quirozNessuna valutazione finora
- Precipitación y TemperaturaDocumento10 paginePrecipitación y TemperaturaRosa Angelica Portalatino PerezNessuna valutazione finora
- Precios Del Petroleo Desde 1861Documento14 paginePrecios Del Petroleo Desde 1861RogerFuenmayorNessuna valutazione finora
- Tabla de Mortalidad Venezolana Ind HyMDocumento2 pagineTabla de Mortalidad Venezolana Ind HyMJeannette RodriguezNessuna valutazione finora
- Tablas de CaudalDocumento2 pagineTablas de CaudalNAOS TELEVISIONNessuna valutazione finora
- Maximas AvenidasDocumento37 pagineMaximas AvenidaseddyNessuna valutazione finora
- Longitud EquivalenteDocumento1 paginaLongitud EquivalenteIv PqNessuna valutazione finora
- Numero de VarillasDocumento4 pagineNumero de Varillasdennys perezNessuna valutazione finora
- Tabla Caudales Calibrados PiñoteaDocumento2 pagineTabla Caudales Calibrados PiñoteaMartín Ignacio Escobar CabreraNessuna valutazione finora
- Diseño de Sardinel ArmadoDocumento12 pagineDiseño de Sardinel ArmadoRoberto Vargas TorresNessuna valutazione finora
- Tabla de AceroDocumento2 pagineTabla de AceroBrow BrungNessuna valutazione finora
- Tabla de Fitto y CorviniDocumento2 pagineTabla de Fitto y CorviniRoberto Vargas100% (2)
- Curva de CompresibilidadDocumento2 pagineCurva de CompresibilidadDavidCruzNessuna valutazione finora
- Anexo 006 - Tablas de Fito y CorvinniDocumento2 pagineAnexo 006 - Tablas de Fito y CorvinniRuben Dario Ganzhi FajardoNessuna valutazione finora
- Análisis Quimico San Antonio de LipezDocumento5 pagineAnálisis Quimico San Antonio de LipezAaron Rasguido AcebeyNessuna valutazione finora
- Curva-IDF-de-Microcuenca - Pata - MediasDocumento31 pagineCurva-IDF-de-Microcuenca - Pata - MediasLUIS CARLOS VILLEGAS PINTADONessuna valutazione finora
- Tabla de FierrosDocumento6 pagineTabla de Fierrosjare85Nessuna valutazione finora
- Aureo, Humano, Espacio e InfluenciaDocumento3 pagineAureo, Humano, Espacio e Influencianelson jose romero montielNessuna valutazione finora
- Calor LatenteDocumento1 paginaCalor LatenteLizett RosalesNessuna valutazione finora
- Fase 2 - Organización - Ruddy Alejandra Jara Vega - ValidadoDocumento47 pagineFase 2 - Organización - Ruddy Alejandra Jara Vega - ValidadoAlejandraNessuna valutazione finora
- Fase 3 - Diseño y Construcción - Alejandra JaraDocumento38 pagineFase 3 - Diseño y Construcción - Alejandra JaraAlejandraNessuna valutazione finora
- Estación Tunel CeroDocumento2 pagineEstación Tunel CeroKevin Ever Mamani YanaNessuna valutazione finora
- Envolvente de FallaDocumento7 pagineEnvolvente de FallaSantiago Quirumbay PozoNessuna valutazione finora
- Conversión Fuerza TorquimetroDocumento1 paginaConversión Fuerza TorquimetrotecnicoteNessuna valutazione finora
- Teoria de MeyerhofDocumento4 pagineTeoria de MeyerhofElias Sanchez TamayNessuna valutazione finora
- GEO OriguinalDocumento174 pagineGEO OriguinalSonlange Shantall CallerNessuna valutazione finora
- Practica GeneralDocumento21 paginePractica Generalkerly brionesNessuna valutazione finora
- Tablas de Acero PDFDocumento3 pagineTablas de Acero PDFAldo MicilioNessuna valutazione finora
- Tablas de Acero PDFDocumento3 pagineTablas de Acero PDFRaul Eduardo LC100% (1)
- Tablas de AceroDocumento3 pagineTablas de AceroAbraham Suprem100% (1)
- Tablas de Acero PDFDocumento3 pagineTablas de Acero PDFMarco MallonNessuna valutazione finora
- Caso Proceso de Acabado en Línea de ProducciónDocumento3 pagineCaso Proceso de Acabado en Línea de ProducciónAri SemperteguiNessuna valutazione finora
- 05 - Tabla de Ross HeideckeDocumento3 pagine05 - Tabla de Ross Heideckejorge EnriqueNessuna valutazione finora
- Tabla de Ross HeideckeDocumento3 pagineTabla de Ross HeideckeZulennys CadenasNessuna valutazione finora
- Avance de CodosDocumento1 paginaAvance de CodosOmar Neftali PzNessuna valutazione finora
- Mr Meta: Aventuras en el mundo de las criptomonedas y la tecnología blockchainDa EverandMr Meta: Aventuras en el mundo de las criptomonedas y la tecnología blockchainNessuna valutazione finora
- La memoria en los bordes: Entrevistas. Dibujos. Elda CerratoDa EverandLa memoria en los bordes: Entrevistas. Dibujos. Elda CerratoNessuna valutazione finora
- Movimientos Mandibulares y Músculos MasticatoriosDocumento10 pagineMovimientos Mandibulares y Músculos MasticatoriosKatherine Velasquez Garcia100% (1)
- Triangulos Del CuelloDocumento2 pagineTriangulos Del CuelloKarmen LarisNessuna valutazione finora
- Taller MatemáticoDocumento4 pagineTaller MatemáticoVíctor Palacios VásquezNessuna valutazione finora
- Angiologã A de Cabeza y CuelloDocumento65 pagineAngiologã A de Cabeza y CuelloJosé GranadosNessuna valutazione finora
- EscalenosDocumento3 pagineEscalenosAlfredo Cruz SantiestebanNessuna valutazione finora
- Sectores de Ambientación QuechuaDocumento9 pagineSectores de Ambientación QuechuaMuni HvcaNessuna valutazione finora
- Ficha Ejercicios Desaconsejados EspaldaDocumento2 pagineFicha Ejercicios Desaconsejados EspaldajoseNessuna valutazione finora
- Semiología - Osteomuscular, Muscular y Columna VertebralDocumento74 pagineSemiología - Osteomuscular, Muscular y Columna VertebralUSMP FN ARCHIVOS100% (2)
- Anatomía y Patología de OidoDocumento18 pagineAnatomía y Patología de OidoBeto DEL PeruNessuna valutazione finora
- Tema 5 Colgajos Cutaneos AxialesDocumento82 pagineTema 5 Colgajos Cutaneos AxialesMarcel Paz100% (1)
- Power Diagnóstico Por ImágenesDocumento46 paginePower Diagnóstico Por ImágenesMaria Medina NavarroNessuna valutazione finora
- Anatomia y Fisiologia de La Deglucion c.1Documento33 pagineAnatomia y Fisiologia de La Deglucion c.1paloma_nunez_m100% (2)
- Musc Diplo 2009Documento10 pagineMusc Diplo 2009botmasterNessuna valutazione finora
- Actividad Práctica Test Musculares Manuales (TMM) : Graduación para Determinación de Fuerza MuscularDocumento3 pagineActividad Práctica Test Musculares Manuales (TMM) : Graduación para Determinación de Fuerza MuscularNacho SilvaNessuna valutazione finora
- Musculos Del TroncoDocumento27 pagineMusculos Del TroncoJhoannaLissChalaNessuna valutazione finora
- Metodo VojtaDocumento46 pagineMetodo VojtaFernando Irigoin AstopilcoNessuna valutazione finora
- I Unidad Morfofisiologia III Completa Samuel ReyesDocumento186 pagineI Unidad Morfofisiologia III Completa Samuel ReyesSam Hidalgo90% (10)
- A Examen Fisico - PAEDocumento8 pagineA Examen Fisico - PAEGeraldine BarretoNessuna valutazione finora
- Arcos Branquiales (TEXTO) PDFDocumento4 pagineArcos Branquiales (TEXTO) PDFJaquelin NitoNessuna valutazione finora
- Via AuditivaDocumento5 pagineVia AuditivaXiomara Obregon0% (1)
- Antropología AnatomíaDocumento20 pagineAntropología AnatomíaCeci SanchezNessuna valutazione finora
- Formulas Caso ClinicoDocumento33 pagineFormulas Caso ClinicoLalo Hurtado GaytanNessuna valutazione finora
- Columna VertebralDocumento17 pagineColumna VertebralLuis E. Molina BustamanteNessuna valutazione finora
- Huesos Del Cráneo Occipital y TemporalDocumento23 pagineHuesos Del Cráneo Occipital y TemporalMonik CuellarNessuna valutazione finora
- TP Sistema Repertorio. 18.06Documento1 paginaTP Sistema Repertorio. 18.06Irene Elizabeth AlcarazNessuna valutazione finora
- Anatomía de Nariz y Senos ParanasalesDocumento7 pagineAnatomía de Nariz y Senos ParanasaleschrisnnerNessuna valutazione finora
- FaciesDocumento31 pagineFaciesJENNY ALLYSON QUIROGA ALARCONNessuna valutazione finora
- El Sistema Respiratorio TerminadoDocumento9 pagineEl Sistema Respiratorio TerminadoSarah Daniels100% (1)
- 17 Pases SueltosDocumento113 pagine17 Pases SueltosAdriaNa ValveRdeNessuna valutazione finora