Potrebbero piacerti anche
- Digital Logic Design Chap 4 NotesDocumento34 pagineDigital Logic Design Chap 4 NotesHelly BoNessuna valutazione finora
- Unit2 LD DssDocumento36 pagineUnit2 LD Dssrajthkumar122333Nessuna valutazione finora
- 08 EEM245 LogicDocumento25 pagine08 EEM245 LogicScar DevilNessuna valutazione finora
- Digital Logic Design Combinational Circuits and AnalysisDocumento74 pagineDigital Logic Design Combinational Circuits and AnalysisHusnain GhaffarNessuna valutazione finora
- FALLSEM2022-23 BECE102L TH VL2022230104585 Reference Material I 10-09-2022 Module-3 PDFDocumento92 pagineFALLSEM2022-23 BECE102L TH VL2022230104585 Reference Material I 10-09-2022 Module-3 PDFChiranjeev Vishnoi 21BCT0043Nessuna valutazione finora
- Mux and Demux FundamentalsDocumento34 pagineMux and Demux FundamentalsmrjNessuna valutazione finora
- Unit 3Documento58 pagineUnit 3Anji ReddyNessuna valutazione finora
- Chisel CheatsheetDocumento2 pagineChisel Cheatsheet冠廷李Nessuna valutazione finora
- Team6 Combinational Logic Circuit 2Documento46 pagineTeam6 Combinational Logic Circuit 2marycrisbanayNessuna valutazione finora
- Chapter 4 2007 0825Documento83 pagineChapter 4 2007 0825Fadly HawariNessuna valutazione finora
- Logic Design-Unit-IIDocumento56 pagineLogic Design-Unit-IIRajarao MandaNessuna valutazione finora
- Digital Systems: Combinational and Sequential Logic CircuitsDocumento43 pagineDigital Systems: Combinational and Sequential Logic CircuitsSubathra Devi MourouganeNessuna valutazione finora
- ECE 521: Microprocessor System: CHAPTER 3: Microprocessor Programming in CDocumento42 pagineECE 521: Microprocessor System: CHAPTER 3: Microprocessor Programming in CAmar MursyidNessuna valutazione finora
- Digital Logic DesignDocumento65 pagineDigital Logic DesignMr. MERLIN GILBERT RAJ S 1154Nessuna valutazione finora
- Chapter-8Documento23 pagineChapter-8hadangquang1408Nessuna valutazione finora
- Practical QuizDocumento13 paginePractical QuizSebastian Austin SuelaNessuna valutazione finora
- Digital 4Documento38 pagineDigital 4usaravanakumarNessuna valutazione finora
- Instructions/Notes:: Int IntDocumento2 pagineInstructions/Notes:: Int IntAbdullah ArifNessuna valutazione finora
- Digital Logic Design: Combinational CircuitsDocumento42 pagineDigital Logic Design: Combinational Circuitsmayyda awanNessuna valutazione finora
- Reduction of Logic & More Combinational CircuitsDocumento18 pagineReduction of Logic & More Combinational CircuitsAlexander TaylorNessuna valutazione finora
- Mos Vlsi Report FinalDocumento46 pagineMos Vlsi Report FinalAyanabho BanerjeeNessuna valutazione finora
- FFTDocumento28 pagineFFTFan Wang100% (2)
- Logical Operations: 1's ComplementDocumento11 pagineLogical Operations: 1's ComplementHarlow SeabornNessuna valutazione finora
- Logic Systems, Data Types, and Operators for Modeling in Verilog HDLDocumento24 pagineLogic Systems, Data Types, and Operators for Modeling in Verilog HDLvamsikrishna gollapudiNessuna valutazione finora
- Combinational Logic Design and AnalysisDocumento54 pagineCombinational Logic Design and AnalysisAkrur NeupaneNessuna valutazione finora
- Discrete Mathematics: 1 Understanding Logical OperationsDocumento2 pagineDiscrete Mathematics: 1 Understanding Logical OperationsPascari PavelNessuna valutazione finora
- Gate MaterialsDocumento13 pagineGate MaterialsnjparNessuna valutazione finora
- Sample QuestionsDocumento6 pagineSample QuestionsKrisleen AbrenicaNessuna valutazione finora
- DSD (U2) 1Documento28 pagineDSD (U2) 1jesudosssNessuna valutazione finora
- Capsule Network ExercisesDocumento15 pagineCapsule Network ExercisesThắng Trần XuânNessuna valutazione finora
- 102 2 DigitalCircuitLab Vlog3Documento17 pagine102 2 DigitalCircuitLab Vlog3Mit Vasant MorbiaNessuna valutazione finora
- Digital Indicating Controller: Bcs2, Bcr2, Bcd2Documento10 pagineDigital Indicating Controller: Bcs2, Bcr2, Bcd2Isthiaq ahmedNessuna valutazione finora
- MATLABDocumento15 pagineMATLAB11008592Nessuna valutazione finora
- 2 CMOSLogicDocumento18 pagine2 CMOSLogicarcticstratNessuna valutazione finora
- Ss5.Flipped Inclass.2023Documento5 pagineSs5.Flipped Inclass.2023ryujindanceNessuna valutazione finora
- Appendix A. Verilog Examples: A.1 Combinational Logic StructuresDocumento14 pagineAppendix A. Verilog Examples: A.1 Combinational Logic StructuresTrenton LindholmNessuna valutazione finora
- Part 2 C Programming EssentialsDocumento33 paginePart 2 C Programming EssentialsSashikanth BethaNessuna valutazione finora
- 09 Num-Lin-Alg NewDocumento38 pagine09 Num-Lin-Alg NewGandNessuna valutazione finora
- Tutorial Program Simulink Matlab 2022Documento35 pagineTutorial Program Simulink Matlab 2022Budi SuhendroNessuna valutazione finora
- LibDocumento3 pagineLibapi-576930856Nessuna valutazione finora
- MatLab Sine and Square Wave GenerationDocumento9 pagineMatLab Sine and Square Wave GenerationkattaswamyNessuna valutazione finora
- Getting Started With Simulink: An Introductory TutorialDocumento47 pagineGetting Started With Simulink: An Introductory TutorialMuhammad NabylNessuna valutazione finora
- Verilog HDLDocumento74 pagineVerilog HDLgautamsvksNessuna valutazione finora
- 1 Variable Index ListDocumento2 pagine1 Variable Index ListiiiNessuna valutazione finora
- Getting Started with Simulink ModelingDocumento31 pagineGetting Started with Simulink ModelingrockmanqhNessuna valutazione finora
- Combinational Logic: Md. Nagrul Islam Lecturer Cse, MecDocumento47 pagineCombinational Logic: Md. Nagrul Islam Lecturer Cse, MecIzaz Uddin MahmudNessuna valutazione finora
- Esd2 Problem Booklet 2020 s2Documento37 pagineEsd2 Problem Booklet 2020 s2Yuhao CaoNessuna valutazione finora
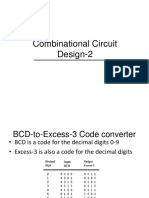
- Combinational Circuit Design-2Documento36 pagineCombinational Circuit Design-2mikko intalNessuna valutazione finora
- Sattcon 05Documento8 pagineSattcon 05simon.nordanclub.managementNessuna valutazione finora
- Chapter 4 Combinational LogicDocumento54 pagineChapter 4 Combinational LogicKaran RegmiNessuna valutazione finora
- A) Specify The Size of The Output (O) in Bits So The Overflow Can Never OccurDocumento21 pagineA) Specify The Size of The Output (O) in Bits So The Overflow Can Never OccurJLM SSNessuna valutazione finora
- Introduction To SystemVerilog and VerificationDocumento107 pagineIntroduction To SystemVerilog and Verificationkashwin45Nessuna valutazione finora
- Lecture Part 1 Scan Conversion Raster DDADocumento15 pagineLecture Part 1 Scan Conversion Raster DDAWakil KhanNessuna valutazione finora
- 2:4 Decoder: DECODER: A Slightly More Complex Decoder Would Be The N-To-2n Type Binary Decoders. These TypesDocumento6 pagine2:4 Decoder: DECODER: A Slightly More Complex Decoder Would Be The N-To-2n Type Binary Decoders. These TypesPavithraRamNessuna valutazione finora
- TCS NQT Problem StatementsDocumento9 pagineTCS NQT Problem StatementsSrinivas Ch (Vasu)Nessuna valutazione finora
- STLD Unit - Iii (Original Notes)Documento70 pagineSTLD Unit - Iii (Original Notes)Saipriya KadiyalaNessuna valutazione finora
- Introduction To Deep Learning: CMSC498LDocumento54 pagineIntroduction To Deep Learning: CMSC498LZu KiNessuna valutazione finora
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Da EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Valutazione: 2.5 su 5 stelle2.5/5 (2)
- Microelectronic Systems 1 Checkbook: The Checkbook SeriesDa EverandMicroelectronic Systems 1 Checkbook: The Checkbook SeriesNessuna valutazione finora
- PK 1Documento1 paginaPK 1Omar CortesNessuna valutazione finora
- PLTZR LOF BOATO MDocumento33 paginePLTZR LOF BOATO MOmar CortesNessuna valutazione finora
- SensorView Quick Reference GuideDocumento11 pagineSensorView Quick Reference GuideOmar CortesNessuna valutazione finora
- SensorView Quick Reference GuideDocumento11 pagineSensorView Quick Reference GuideOmar CortesNessuna valutazione finora
- UR10 Controller Log AnalysisDocumento656 pagineUR10 Controller Log AnalysisOmar CortesNessuna valutazione finora
- Aplicaciones Industria FarmaceuticaDocumento18 pagineAplicaciones Industria FarmaceuticaOmar CortesNessuna valutazione finora
- Reference Guide 1.01 - EN PDFDocumento43 pagineReference Guide 1.01 - EN PDFOmar CortesNessuna valutazione finora
- Log HistoryDocumento3.600 pagineLog HistoryOmar CortesNessuna valutazione finora
- LFM Gateway Mode - Data Preparation and Registration v4.4Documento40 pagineLFM Gateway Mode - Data Preparation and Registration v4.4Slobodan GaracaNessuna valutazione finora
- Normalization in DBMSDocumento17 pagineNormalization in DBMShemacrcNessuna valutazione finora
- Divide and Conquer Algorithm Design MethodDocumento3 pagineDivide and Conquer Algorithm Design MethodEbmesem100% (1)
- Parallel Computing Study For The Large-Scale Generalized Eigenvalue Problems in Modal AnalysisDocumento13 pagineParallel Computing Study For The Large-Scale Generalized Eigenvalue Problems in Modal AnalysisJulian Miller Palacios EspinozaNessuna valutazione finora
- NetScaler 10.5 HTTP CalloutsDocumento45 pagineNetScaler 10.5 HTTP CalloutssudharaghavanNessuna valutazione finora
- User Profile Wizard 3.0 User GuideDocumento74 pagineUser Profile Wizard 3.0 User GuideThiago Mendes PereiraNessuna valutazione finora
- Srs of Linked inDocumento24 pagineSrs of Linked inadarsh raj100% (1)
- Django & The OWASP Top 10Documento40 pagineDjango & The OWASP Top 10Vũ Như CẩnNessuna valutazione finora
- Course Plan - Soft ComputingDocumento5 pagineCourse Plan - Soft ComputingkannanchammyNessuna valutazione finora
- Chapter 12Documento50 pagineChapter 12Ram MannavaNessuna valutazione finora
- 2.1.4.9 Lab - Establishing A Console Session With Tera TermDocumento11 pagine2.1.4.9 Lab - Establishing A Console Session With Tera Termbemokone43% (7)
- LED-Control-PIC16F877ADocumento5 pagineLED-Control-PIC16F877AMohd Izzat Abd GhaniNessuna valutazione finora
- AWS Business CaseDocumento52 pagineAWS Business CasePhil JohnsonNessuna valutazione finora
- Free PDF Map of ParisDocumento2 pagineFree PDF Map of ParisTannerNessuna valutazione finora
- Computer Concept and Web Technology: Cse 3Rd Semester Jkie BilaspurDocumento98 pagineComputer Concept and Web Technology: Cse 3Rd Semester Jkie Bilaspurmd.zainul haqueNessuna valutazione finora
- Estudiante: Docente: Materia: Cochabamba-Bolivia: Aguilar Ledezma Edwar Ing. Marcelo Flores Sistemas de Información 2Documento5 pagineEstudiante: Docente: Materia: Cochabamba-Bolivia: Aguilar Ledezma Edwar Ing. Marcelo Flores Sistemas de Información 2Mirco AngelNessuna valutazione finora
- Basic Computer Organization: Instruction Codes, Registers & MemoryDocumento49 pagineBasic Computer Organization: Instruction Codes, Registers & MemoryBalu RakeshNessuna valutazione finora
- Monitor and Tshoot ASA Performance IssuesDocumento20 pagineMonitor and Tshoot ASA Performance IssuesChandru BlueEyesNessuna valutazione finora
- A UML-based Data Warehouse Design Method PDFDocumento25 pagineA UML-based Data Warehouse Design Method PDFM. Nishom, S.KomNessuna valutazione finora
- Pavani PuchakaalaDocumento3 paginePavani Puchakaalaaitharaju harshaniNessuna valutazione finora
- Installation Guide DrupalDocumento18 pagineInstallation Guide DrupalieusaleNessuna valutazione finora
- Horizontal Clustering in OBIEE11gDocumento13 pagineHorizontal Clustering in OBIEE11gPSIEBELNessuna valutazione finora
- Install Samba Server on UbuntuDocumento28 pagineInstall Samba Server on UbuntuAlan SmillNessuna valutazione finora
- Configuring The Cisco ISE AppliancesDocumento18 pagineConfiguring The Cisco ISE AppliancesNakpane SonhayeNessuna valutazione finora
- Tips On Using Phase Manager With Factory Talk Batch PDFDocumento19 pagineTips On Using Phase Manager With Factory Talk Batch PDFfaberNessuna valutazione finora
- Stacks and QueuesDocumento8 pagineStacks and QueuesGobara DhanNessuna valutazione finora
- AlliedWare PlusTM HOWTODocumento42 pagineAlliedWare PlusTM HOWTOliveNessuna valutazione finora
- Enable SSO in SAP System Using Kerberos AuthenticationDocumento10 pagineEnable SSO in SAP System Using Kerberos AuthenticationPILLINAGARAJUNessuna valutazione finora
- Om Manual Is3000 Ssw8Documento346 pagineOm Manual Is3000 Ssw8olaftk75% (4)
- Che 560 HW5Documento1 paginaChe 560 HW5Syed SamsamuddinNessuna valutazione finora