Potrebbero piacerti anche
- Data Percobaan DSKDocumento1 paginaData Percobaan DSKM Surya HasibuanNessuna valutazione finora
- Data Percobaan BJTDocumento2 pagineData Percobaan BJTM Surya HasibuanNessuna valutazione finora
- Colorful Medan CarnivalDocumento1 paginaColorful Medan CarnivalM Surya HasibuanNessuna valutazione finora
- Energy Efficient IoT-Based Smart Home PDFDocumento4 pagineEnergy Efficient IoT-Based Smart Home PDFBryanFelipeSantillanGomezNessuna valutazione finora
- Great MigrationsDocumento7 pagineGreat MigrationsM Surya HasibuanNessuna valutazione finora
- 9.miles A Microcontroller Learning System Combining Hardware and S PDFDocumento5 pagine9.miles A Microcontroller Learning System Combining Hardware and S PDFM Surya HasibuanNessuna valutazione finora
- 55305294Documento55 pagine55305294Liu WenNessuna valutazione finora
- 11 Esp8266 PDFDocumento5 pagine11 Esp8266 PDFM Surya HasibuanNessuna valutazione finora
- Iot Ini Bos Bukan Kaleng Kaleng PDFDocumento1 paginaIot Ini Bos Bukan Kaleng Kaleng PDFM Surya HasibuanNessuna valutazione finora
- Internet of Things For Smart CitiesDocumento11 pagineInternet of Things For Smart Citiesloory21100% (1)
- 6.smart HomeDocumento4 pagine6.smart HomeM Surya HasibuanNessuna valutazione finora
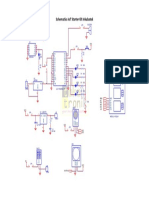
- Schematics IoT Starter Kit Inkubatek PDFDocumento1 paginaSchematics IoT Starter Kit Inkubatek PDFM Surya HasibuanNessuna valutazione finora
- F C I T: Uture and Hallenges OF Nternet OF HingsDocumento13 pagineF C I T: Uture and Hallenges OF Nternet OF HingsNikko SalomonNessuna valutazione finora
- Colorful Medan CarnivalDocumento1 paginaColorful Medan CarnivalM Surya HasibuanNessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (344)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (587)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (119)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Study Waveguide Modes and PropagationDocumento10 pagineStudy Waveguide Modes and PropagationFahmi ChandraNessuna valutazione finora
- Manual NFXXXX V1.31Documento64 pagineManual NFXXXX V1.31Andres TovarNessuna valutazione finora
- OneExpert 630 Extended QuickStart Guide V1aDocumento153 pagineOneExpert 630 Extended QuickStart Guide V1ajuan guillermo zapataNessuna valutazione finora
- Samson 7kit PDFDocumento12 pagineSamson 7kit PDFFernando Dario AvilaNessuna valutazione finora
- M.N.N. Appaji: M.SC (IT), M.B.A. (Finance), MCTS, MCP, CEHDocumento44 pagineM.N.N. Appaji: M.SC (IT), M.B.A. (Finance), MCTS, MCP, CEHM N N AppajiNessuna valutazione finora
- Lecture 1Documento29 pagineLecture 1Esraa SamirNessuna valutazione finora
- Pyro LaserDocumento2 paginePyro LaserWilder Ortiz VelasquezNessuna valutazione finora
- CPT Cirprotec PSC4 12 - 5 400 TT IR 77738406Documento8 pagineCPT Cirprotec PSC4 12 - 5 400 TT IR 77738406niltonnas80Nessuna valutazione finora
- MBI Driver IC For LED Display ScreenDocumento14 pagineMBI Driver IC For LED Display ScreenAcido CinicoNessuna valutazione finora
- AVR-051 User Manual: Monicon International Co., LTD AVR-051Documento10 pagineAVR-051 User Manual: Monicon International Co., LTD AVR-051GONZALONessuna valutazione finora
- Deh-2900mp Manual en de EsDocumento60 pagineDeh-2900mp Manual en de Esmail_lucianNessuna valutazione finora
- Aup 2inchDocumento1 paginaAup 2inchIssouf TraoréNessuna valutazione finora
- Axpert VP-1000&VP-2000 Service Manual PF 1 20191022Documento27 pagineAxpert VP-1000&VP-2000 Service Manual PF 1 20191022migsayal0% (1)
- TDR900 QuickStartGuide PDFDocumento2 pagineTDR900 QuickStartGuide PDFmiamor$44Nessuna valutazione finora
- AW100DMBDocumento8 pagineAW100DMBchan_thong_1Nessuna valutazione finora
- InterLink Split-Mount ManualDocumento384 pagineInterLink Split-Mount ManualEdwin OlivarezNessuna valutazione finora
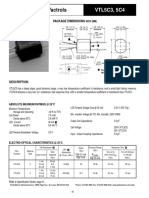
- Low Cost Axial Vactrols: VTL5C3, 5C4Documento2 pagineLow Cost Axial Vactrols: VTL5C3, 5C4sillyNessuna valutazione finora
- How Does Radio Waves Works in Radio BroadcastingDocumento2 pagineHow Does Radio Waves Works in Radio BroadcastingFahmi DimacalingNessuna valutazione finora
- SwissQual Measurements Reported in TEMS Discovery Device 12.0.0 PDFDocumento53 pagineSwissQual Measurements Reported in TEMS Discovery Device 12.0.0 PDFnaeem05Nessuna valutazione finora
- Syllabus: India'S Best Institute For EngineersDocumento6 pagineSyllabus: India'S Best Institute For EngineersGaurav ShrimaliNessuna valutazione finora
- MiTOP-E3 T3 PDFDocumento120 pagineMiTOP-E3 T3 PDFcristytrs787878Nessuna valutazione finora
- 1/8 To 25 HP NEMA 1 Current Vector Microdrive: A World of Power in The Palm of Your Hand!Documento2 pagine1/8 To 25 HP NEMA 1 Current Vector Microdrive: A World of Power in The Palm of Your Hand!Jeimy Rafael Zacarias RodriguezNessuna valutazione finora
- MCQ Electrical Engg. Unit 1.Documento69 pagineMCQ Electrical Engg. Unit 1.Trupti NandikolmathNessuna valutazione finora
- Motorola H24 Developer's Guide - at Commands Reference ManualDocumento554 pagineMotorola H24 Developer's Guide - at Commands Reference ManualAjay KumarNessuna valutazione finora
- OWON SDS1000 Series Spec PDFDocumento2 pagineOWON SDS1000 Series Spec PDFAlex ZXNessuna valutazione finora
- Advc Operational GuideDocumento184 pagineAdvc Operational GuidegovindarulNessuna valutazione finora
- TL-MR3420 V3 DatasheetDocumento2 pagineTL-MR3420 V3 DatasheetMuhammad aliNessuna valutazione finora
- Compiled Comms1v2Documento31 pagineCompiled Comms1v2John Errol MergalNessuna valutazione finora
- Projector Spec: TechnologyDocumento2 pagineProjector Spec: TechnologyTathokoza MpondaNessuna valutazione finora
- Rikola LTD.: - Founded 1993 - Provides Tools For SpectralDocumento15 pagineRikola LTD.: - Founded 1993 - Provides Tools For SpectralNatal GeoNessuna valutazione finora