Potrebbero piacerti anche
- Toyota Forklift 6FG - 6FD10-30 Service Repair ManualDocumento41 pagineToyota Forklift 6FG - 6FD10-30 Service Repair ManualRolandas Petkus75% (4)
- 6FG-6FD10-30-repair Manual PDFDocumento462 pagine6FG-6FD10-30-repair Manual PDFTrung Nguyễn80% (5)
- Effectron II Manual PDFDocumento32 pagineEffectron II Manual PDFtelengard_t100% (2)
- Materials Data for Cyclic Loading: Low-Alloy SteelsDa EverandMaterials Data for Cyclic Loading: Low-Alloy SteelsValutazione: 5 su 5 stelle5/5 (2)
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsDa EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNessuna valutazione finora
- New Text DocumentDocumento1 paginaNew Text Documentali amhazNessuna valutazione finora
- Corporate Purchasing Specifications: Full Gloss Polyurethane Finishing Paint Full Gloss Polyurethane Finishing PaintDocumento8 pagineCorporate Purchasing Specifications: Full Gloss Polyurethane Finishing Paint Full Gloss Polyurethane Finishing Paintali amhazNessuna valutazione finora
- Corporate Purchasing Specifications: Full Gloss Polyurethane Finishing Paint Full Gloss Polyurethane Finishing PaintDocumento8 pagineCorporate Purchasing Specifications: Full Gloss Polyurethane Finishing Paint Full Gloss Polyurethane Finishing Paintali amhazNessuna valutazione finora
- Plasma Display TV: Chassis: D53A (P) - 42" TTX Model: Ps42P2Stx/AagDocumento136 paginePlasma Display TV: Chassis: D53A (P) - 42" TTX Model: Ps42P2Stx/Aagsm14jNessuna valutazione finora
- Hybrid Stepping Motors Drivers: 2 Phase KH Series 3 Phase KT/KR SeriesDocumento70 pagineHybrid Stepping Motors Drivers: 2 Phase KH Series 3 Phase KT/KR SeriespedjoNessuna valutazione finora
- Hybrid Stepping Motors and Drivers Size 23 56mm SquareDocumento70 pagineHybrid Stepping Motors and Drivers Size 23 56mm SquareIVANNessuna valutazione finora
- Wheel Load Data PDFDocumento54 pagineWheel Load Data PDFDinesh PatilNessuna valutazione finora
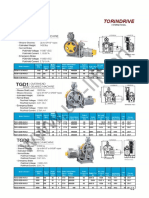
- Torin Drive ManualDocumento9 pagineTorin Drive ManualRebecca DangNessuna valutazione finora
- LIGHT PANEL LOAD SCHEDULE A3 Last 5-11-2023Documento1 paginaLIGHT PANEL LOAD SCHEDULE A3 Last 5-11-2023engsharaf2010Nessuna valutazione finora
- Light Panel Load Schedule A33 Last 5-11-2023Documento1 paginaLight Panel Load Schedule A33 Last 5-11-2023engsharaf2010Nessuna valutazione finora
- 2-Way Poppet SVP08-NCR: Solenoid Valves Technical InformationDocumento2 pagine2-Way Poppet SVP08-NCR: Solenoid Valves Technical InformationÂnderson Silva BrasilNessuna valutazione finora
- CE-Series Spec SheetDocumento1 paginaCE-Series Spec SheetJhom LamsenNessuna valutazione finora
- Comet CatalogDocumento88 pagineComet CatalogSteve WaismanNessuna valutazione finora
- 08 Februari 2020Documento63 pagine08 Februari 2020mikelNessuna valutazione finora
- 10 Februari 2020Documento59 pagine10 Februari 2020mikelNessuna valutazione finora
- Annex Getting Started With ATV312: Short-Circuit Current Ratings (SCCR) and Branch Circuit ProtectionDocumento4 pagineAnnex Getting Started With ATV312: Short-Circuit Current Ratings (SCCR) and Branch Circuit ProtectionTommy KhNessuna valutazione finora
- ChallengerDocumento9 pagineChallengerFelipe HernandezNessuna valutazione finora
- RCK13ENDocumento1 paginaRCK13ENGanesh pawarNessuna valutazione finora
- Industrial Tractor Rear Tyres (R1, R3, R4) : Technical Data Chart For TR-459 Available atDocumento1 paginaIndustrial Tractor Rear Tyres (R1, R3, R4) : Technical Data Chart For TR-459 Available atRahul RanaNessuna valutazione finora
- Exercise 1 - Load Flow and Short CircuitDocumento4 pagineExercise 1 - Load Flow and Short CircuitCRISTIAN CAMILO MORALES SOLISNessuna valutazione finora
- Grundfosliterature 80288 PDFDocumento14 pagineGrundfosliterature 80288 PDFMarkoNessuna valutazione finora
- Universal StuffDocumento8 pagineUniversal Stuffjaume68Nessuna valutazione finora
- Opera Ting Manual: HQ400/3A - HQ400/3B - HQ400/3L Multi - Purpose MachineDocumento34 pagineOpera Ting Manual: HQ400/3A - HQ400/3B - HQ400/3L Multi - Purpose MachinerianrureNessuna valutazione finora
- Point and CrossingDocumento17 paginePoint and CrossingPrithwipal Singha86% (7)
- Series (40W) : Motor Dimension Characteristic CurveDocumento2 pagineSeries (40W) : Motor Dimension Characteristic CurvecutoNessuna valutazione finora
- Carrier Ductable Ac 3 0 TRDocumento4 pagineCarrier Ductable Ac 3 0 TRKagitha TirumalaNessuna valutazione finora
- 212 Nadella Rky RKXDocumento1 pagina212 Nadella Rky RKXmanoj_doshi_1Nessuna valutazione finora
- Hydromotoren Baureihe Am 16-22 e 20120822Documento1 paginaHydromotoren Baureihe Am 16-22 e 20120822Joan GarciaNessuna valutazione finora
- 5FG10 30, 5FD10 30 Inspection&AdjustmentDocumento89 pagine5FG10 30, 5FD10 30 Inspection&AdjustmentSuharto Zuhri100% (2)
- RBD SRBD PF: Elastic Couplings Single Pump Drive PtoDocumento7 pagineRBD SRBD PF: Elastic Couplings Single Pump Drive PtococorakoNessuna valutazione finora
- Foreword: Toyota Motor CorporationDocumento11 pagineForeword: Toyota Motor CorporationAryo Wicaksono0% (2)
- Kyec Cable ReelDocumento16 pagineKyec Cable ReelMulyanto Abinya Farras-IzyanNessuna valutazione finora
- 1351247687705-Unit Weight FabricatedDocumento2 pagine1351247687705-Unit Weight FabricatedAnonymous XJUXXqjSVNessuna valutazione finora
- SGE 8 Signal Generator Kit InstructionsDocumento2 pagineSGE 8 Signal Generator Kit InstructionsTodd HoferNessuna valutazione finora
- Chain Calculation PDFDocumento10 pagineChain Calculation PDF113314Nessuna valutazione finora
- SSTC 2Documento1 paginaSSTC 2Seraphin MiguelNessuna valutazione finora
- 0CD23959AE9049A680BFD0D029AFD225Documento3 pagine0CD23959AE9049A680BFD0D029AFD225ammuNessuna valutazione finora
- Hydraulic Cylinder For Potentially Explosive Atmospheres: Bosch Rexroth AG, RE 17335-X, Edition: 2016-11Documento68 pagineHydraulic Cylinder For Potentially Explosive Atmospheres: Bosch Rexroth AG, RE 17335-X, Edition: 2016-11Daniel OdeNessuna valutazione finora
- GEDocumento21 pagineGENovakurniawan0% (1)
- LZMS2 A300 PDFDocumento2 pagineLZMS2 A300 PDFdlm_aqp5304Nessuna valutazione finora
- Generator LOGDocumento3 pagineGenerator LOGnivasssvNessuna valutazione finora
- Kuka Robotics Low Payloads PDFDocumento23 pagineKuka Robotics Low Payloads PDFAugustino Nguyen Cao ThangNessuna valutazione finora
- 9 Torque EquationDocumento11 pagine9 Torque EquationAbhyagniNessuna valutazione finora
- Licad86061000008 F45Documento1 paginaLicad86061000008 F45Sakeel WagirkhanNessuna valutazione finora
- SMT Mechanical Suspensions: ROR Trailer ProductsDocumento24 pagineSMT Mechanical Suspensions: ROR Trailer ProductsOskarNessuna valutazione finora
- Rotary & Demolition Hammer: CatalogueDocumento40 pagineRotary & Demolition Hammer: CatalogueSachin NambiarNessuna valutazione finora
- Update Road Coverage SuggestionDocumento58 pagineUpdate Road Coverage SuggestionelmoustaphaelNessuna valutazione finora
- Sonatest Transducer CatalogueDocumento88 pagineSonatest Transducer CatalogueAromal SNessuna valutazione finora
- ELCB - ECONOMI - TZ - ZE Series CatalogueDocumento1 paginaELCB - ECONOMI - TZ - ZE Series CatalogueAkun Iseng00001Nessuna valutazione finora
- LIGHT PANEL LOAD SCHEDULE Last 5-11-2023Documento1 paginaLIGHT PANEL LOAD SCHEDULE Last 5-11-2023engsharaf2010Nessuna valutazione finora
- N43T Green GearDocumento3 pagineN43T Green GearnavelsgNessuna valutazione finora
- Induction MotorDocumento50 pagineInduction MotorsunhuynhNessuna valutazione finora
- Encoder: TRD-MX TRD-S/SH TRD-2E TRD-N/NH TRD-J TRD-GK Trd-Na TRD-KDocumento43 pagineEncoder: TRD-MX TRD-S/SH TRD-2E TRD-N/NH TRD-J TRD-GK Trd-Na TRD-KSergio Cayetano PalaciosNessuna valutazione finora
- Shnieder Price-List 2022Documento498 pagineShnieder Price-List 2022Amr EidNessuna valutazione finora
- Adobe Scan 16 Mar 2024Documento8 pagineAdobe Scan 16 Mar 2024sarapdad66Nessuna valutazione finora
- Cummins Engine Error CodesDocumento26 pagineCummins Engine Error CodesVictorNessuna valutazione finora
- Hydraulic Cylinder For Potentially Explosive Areas: Bosch Rexroth AG, RE 17335-X, Edition: 2019-04Documento60 pagineHydraulic Cylinder For Potentially Explosive Areas: Bosch Rexroth AG, RE 17335-X, Edition: 2019-04Sayed Hussien AbdelazizNessuna valutazione finora
- RRV DC: 3.54 In. (90 MM)Documento7 pagineRRV DC: 3.54 In. (90 MM)Trevor AdamsNessuna valutazione finora
- General Film Behaviour: Thin Solid Films, 112 (1984) 89-95Documento7 pagineGeneral Film Behaviour: Thin Solid Films, 112 (1984) 89-95ali amhazNessuna valutazione finora
- Studies On The Thermal Properties of Hypereutectic Al-Si Alloys by Using Transient MethodDocumento10 pagineStudies On The Thermal Properties of Hypereutectic Al-Si Alloys by Using Transient Methodali amhazNessuna valutazione finora
- Polyurethane - 07 Mar 2017Documento3 paginePolyurethane - 07 Mar 2017ali amhazNessuna valutazione finora
- Page - 1Documento19 paginePage - 1ali amhazNessuna valutazione finora
- Technoblogy - ATtiny85 Bargraph VoltmeterDocumento6 pagineTechnoblogy - ATtiny85 Bargraph VoltmeterreynielNessuna valutazione finora
- EIP 575 Operation ManualDocumento78 pagineEIP 575 Operation ManualLuis ContrerasNessuna valutazione finora
- (Michael Shur) Physics of Semiconductor DevicesDocumento90 pagine(Michael Shur) Physics of Semiconductor DevicesIshtiaque Navid0% (1)
- Eaton 134917 DS7 340SX055N0 N en - GBDocumento5 pagineEaton 134917 DS7 340SX055N0 N en - GBasmoosa_scribdNessuna valutazione finora
- MMS 407C Manual de ServiceDocumento216 pagineMMS 407C Manual de Servicejao_lescano22Nessuna valutazione finora
- h11c4 PDFDocumento6 pagineh11c4 PDFbenjaminNessuna valutazione finora
- Se3.3ni-4.6ni en NewDocumento1 paginaSe3.3ni-4.6ni en NewJovan MilenkovicNessuna valutazione finora
- Electrical Generator Course GEOL-TAR500L4R r2 PrintDocumento40 pagineElectrical Generator Course GEOL-TAR500L4R r2 PrintPetru BurgheleaNessuna valutazione finora
- VAV Method of StatementDocumento6 pagineVAV Method of StatementRanjith KumarNessuna valutazione finora
- 22.electromotive Force and Potential DifferenceDocumento4 pagine22.electromotive Force and Potential DifferenceSyed Mairaj Ul HaqNessuna valutazione finora
- Solution Assignments 4 PDFDocumento8 pagineSolution Assignments 4 PDFAhmed JamalNessuna valutazione finora
- SGDH Sigma IIyashkawa PDFDocumento498 pagineSGDH Sigma IIyashkawa PDFAdalmi Santos SilvaNessuna valutazione finora
- PSP300 IntertekDocumento6 paginePSP300 IntertekJames Wayne BarkerNessuna valutazione finora
- LG Electronics - Compressor - TS - NS PDFDocumento8 pagineLG Electronics - Compressor - TS - NS PDFEfcargali100% (1)
- Koel AmfDocumento4 pagineKoel AmfChetan GuptaNessuna valutazione finora
- Mitrek Repeater ConversionDocumento31 pagineMitrek Repeater ConversionrobNessuna valutazione finora
- Modulo Siemens Sm100 24Documento2 pagineModulo Siemens Sm100 24felipegonzalezmarquez0% (1)
- 2016 - Obi e Bass - Trends and Challenges of Grid-ConnectedDocumento13 pagine2016 - Obi e Bass - Trends and Challenges of Grid-ConnectedFabricio HigoNessuna valutazione finora
- Magnetism FundamentalsDocumento6 pagineMagnetism FundamentalsRed David BallesterosNessuna valutazione finora
- 10KWp Solar Rooftop SystemDocumento7 pagine10KWp Solar Rooftop SystemExergy100% (2)
- Sony HCD-ZX50MD Service ManualDocumento136 pagineSony HCD-ZX50MD Service ManualElkin MezaNessuna valutazione finora
- Raytheon R1206XXDocumento70 pagineRaytheon R1206XXtyutyuNessuna valutazione finora
- Hydrastep & Hydratect: Water/steam Monitoring SystemsDocumento8 pagineHydrastep & Hydratect: Water/steam Monitoring SystemsSrinivasarao YenigallaNessuna valutazione finora
- Brochure For Radiographic InterpretationDocumento2 pagineBrochure For Radiographic InterpretationrohanNessuna valutazione finora
- Lab 8 Battery Charging DischargingDocumento7 pagineLab 8 Battery Charging DischargingshuehdihdueozbeNessuna valutazione finora
- Automatic Night Lamp With Morning AlarmDocumento47 pagineAutomatic Night Lamp With Morning Alarmbalajig47375% (8)
- Self Biased High Performance Folded Cascode Cmos OpampDocumento6 pagineSelf Biased High Performance Folded Cascode Cmos OpampArvind MishraNessuna valutazione finora
- Study of Iraqi Smart GridDocumento8 pagineStudy of Iraqi Smart GridTrầnMinhCưNessuna valutazione finora