Potrebbero piacerti anche
- Easypic Pro v7 Manual v101Documento40 pagineEasypic Pro v7 Manual v101stranger72_28Nessuna valutazione finora
- ERM1602 2.1 DatasheetDocumento20 pagineERM1602 2.1 Datasheetstranger72_28Nessuna valutazione finora
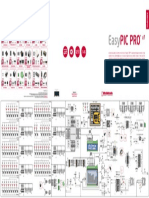
- Easypic Pro v7 Schematic v101Documento2 pagineEasypic Pro v7 Schematic v101stranger72_28Nessuna valutazione finora
- Radiosat 6010Documento1 paginaRadiosat 6010stranger72_28Nessuna valutazione finora
- Reference Guide MikrocDocumento28 pagineReference Guide Mikrocstranger72_28Nessuna valutazione finora
- Mikroprog Suite Pic Dspic Pic32 Manual V100aDocumento24 pagineMikroprog Suite Pic Dspic Pic32 Manual V100astranger72_28Nessuna valutazione finora
- User's Manual: FY2200S Series Dual Channel DDS Signal GeneratorDocumento10 pagineUser's Manual: FY2200S Series Dual Channel DDS Signal Generatorttwigg83Nessuna valutazione finora
- Samsung Galaxy Ace 2 GT-I8160 ManualDocumento160 pagineSamsung Galaxy Ace 2 GT-I8160 Manualstranger72_28Nessuna valutazione finora
- MatildaDocumento1 paginaMatildastranger72_28Nessuna valutazione finora
- Optibox Spider HowToDocumento7 pagineOptibox Spider HowTostranger72_28Nessuna valutazione finora
- AmikoDocumento9 pagineAmikostranger72_28Nessuna valutazione finora
- Pioneer vsx-1016Documento80 paginePioneer vsx-1016stranger72_28Nessuna valutazione finora
- Basic Logic Gates ExperimentsDocumento4 pagineBasic Logic Gates Experimentsstranger72_28Nessuna valutazione finora
- Shoe Dog: A Memoir by the Creator of NikeDa EverandShoe Dog: A Memoir by the Creator of NikeValutazione: 4.5 su 5 stelle4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)Da EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Valutazione: 4 su 5 stelle4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDa EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeValutazione: 4 su 5 stelle4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDa EverandThe Little Book of Hygge: Danish Secrets to Happy LivingValutazione: 3.5 su 5 stelle3.5/5 (400)
- Grit: The Power of Passion and PerseveranceDa EverandGrit: The Power of Passion and PerseveranceValutazione: 4 su 5 stelle4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDa EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureValutazione: 4.5 su 5 stelle4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDa EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryValutazione: 3.5 su 5 stelle3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDa EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceValutazione: 4 su 5 stelle4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnDa EverandTeam of Rivals: The Political Genius of Abraham LincolnValutazione: 4.5 su 5 stelle4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDa EverandNever Split the Difference: Negotiating As If Your Life Depended On ItValutazione: 4.5 su 5 stelle4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDa EverandThe Emperor of All Maladies: A Biography of CancerValutazione: 4.5 su 5 stelle4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDa EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaValutazione: 4.5 su 5 stelle4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealDa EverandOn Fire: The (Burning) Case for a Green New DealValutazione: 4 su 5 stelle4/5 (74)
- The Unwinding: An Inner History of the New AmericaDa EverandThe Unwinding: An Inner History of the New AmericaValutazione: 4 su 5 stelle4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDa EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersValutazione: 4.5 su 5 stelle4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDa EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyValutazione: 3.5 su 5 stelle3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDa EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreValutazione: 4 su 5 stelle4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Da EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Valutazione: 4.5 su 5 stelle4.5/5 (121)
- Her Body and Other Parties: StoriesDa EverandHer Body and Other Parties: StoriesValutazione: 4 su 5 stelle4/5 (821)
- Week 11 Lab - Faradays LawDocumento13 pagineWeek 11 Lab - Faradays LawRowen PratherNessuna valutazione finora
- Manual: iSTAT I400 Standard TransducerDocumento62 pagineManual: iSTAT I400 Standard TransducerMehdi_Mashayekhi_172Nessuna valutazione finora
- Optimize Hitachi Storage and Server Platforms in Vmware Vsphere 5 5 Environments Best Practices Guide PDFDocumento49 pagineOptimize Hitachi Storage and Server Platforms in Vmware Vsphere 5 5 Environments Best Practices Guide PDFLars GlöcknerNessuna valutazione finora
- 15 Inch PV755A Optoma PanoView PV755A MonitorDocumento3 pagine15 Inch PV755A Optoma PanoView PV755A MonitorVictor Tito C GNessuna valutazione finora
- Webuser 21 August 2019Documento76 pagineWebuser 21 August 2019michelleNessuna valutazione finora
- WSDA-USB Datasheet (8400-0074)Documento2 pagineWSDA-USB Datasheet (8400-0074)paulkohanNessuna valutazione finora
- KingtoneDocumento2 pagineKingtoneUlla WirtanenNessuna valutazione finora
- A History of The Invention of The Transistor and Where It Will Lead UsDocumento9 pagineA History of The Invention of The Transistor and Where It Will Lead UstthenryNessuna valutazione finora
- Midterm SampleDocumento14 pagineMidterm SampleTahirNessuna valutazione finora
- TC-P50C2: 50 Inch Class 720p Plasma HDTVDocumento95 pagineTC-P50C2: 50 Inch Class 720p Plasma HDTVRonald CastellarNessuna valutazione finora
- Soal Procedure TextDocumento8 pagineSoal Procedure Textheni faridaNessuna valutazione finora
- Lesson 3 - FiltersDocumento29 pagineLesson 3 - FiltersRennel MallariNessuna valutazione finora
- Rayleigh PotDocumento10 pagineRayleigh PotNikhilesh ShajiNessuna valutazione finora
- KontolDocumento144 pagineKontolAnonymous ssieDC50% (2)
- Divided by The PermittivityDocumento1 paginaDivided by The PermittivityVasanth Kumar NainalaNessuna valutazione finora
- Sis & SilDocumento65 pagineSis & SilGecNessuna valutazione finora
- 2822 HDocumento3 pagine2822 HKrank101Nessuna valutazione finora
- Smart Office Automation SystemDocumento6 pagineSmart Office Automation SystemInternational Journal of Application or Innovation in Engineering & Management100% (1)
- Intermediate FrequencyDocumento2 pagineIntermediate FrequencySharif ShahadatNessuna valutazione finora
- 2006 Electrical Component Location PDFDocumento187 pagine2006 Electrical Component Location PDFJairo RojasNessuna valutazione finora
- Total Station RObotic Topcon GT 501 With Automatic Control - TRANSSURVEYDocumento4 pagineTotal Station RObotic Topcon GT 501 With Automatic Control - TRANSSURVEYTRANS SURVEYNessuna valutazione finora
- Microsemi SmartFusion2 and IGLOO2 Datasheet DS0128 V12Documento140 pagineMicrosemi SmartFusion2 and IGLOO2 Datasheet DS0128 V12Miguel Alberto Dávila SacotoNessuna valutazione finora
- Double Sideband Suppressed Carrier Telemetry SystemDocumento15 pagineDouble Sideband Suppressed Carrier Telemetry SystemWasif AzimNessuna valutazione finora
- MK 201 ADocumento4 pagineMK 201 AAli AhmadNessuna valutazione finora
- Charging SystemDocumento15 pagineCharging SystemvigneshwaranNessuna valutazione finora
- 1601 0256 Aj3Documento68 pagine1601 0256 Aj3muayid al omaryNessuna valutazione finora
- RTL Verilog Navabi PDFDocumento294 pagineRTL Verilog Navabi PDFSiva chowdaryNessuna valutazione finora
- 1-Intro - Review of Basic Tools 26716Documento39 pagine1-Intro - Review of Basic Tools 26716bilal nagoriNessuna valutazione finora
- Electronics Washing Machine ControlDocumento4 pagineElectronics Washing Machine ControlMohd ShukriNessuna valutazione finora
- Kahlenberg M-512 Fog HornDocumento2 pagineKahlenberg M-512 Fog HorntariktunadNessuna valutazione finora