Potrebbero piacerti anche
- TP3 Perez Garcia Sani PDFDocumento15 pagineTP3 Perez Garcia Sani PDFCFPerezNessuna valutazione finora
- Tp1 Perez Garcia SaniDocumento6 pagineTp1 Perez Garcia SaniCFPerezNessuna valutazione finora
- Antenas Tarea3Documento5 pagineAntenas Tarea3CFPerezNessuna valutazione finora
- Tp1 Perez Garcia SaniDocumento6 pagineTp1 Perez Garcia SaniCFPerezNessuna valutazione finora
- TP2 Perez Garcia SaniDocumento6 pagineTP2 Perez Garcia SaniCFPerezNessuna valutazione finora
- TP4 Perez Garcia Sani PDFDocumento3 pagineTP4 Perez Garcia Sani PDFCFPerezNessuna valutazione finora
- Tarea1 Chulde Guambo PerezDocumento18 pagineTarea1 Chulde Guambo PerezCFPerezNessuna valutazione finora
- Lab3.6 InformeDocumento5 pagineLab3.6 InformeCFPerezNessuna valutazione finora
- Qué Es Un Relé de Protección y en Donde Se Lo OcupaDocumento8 pagineQué Es Un Relé de Protección y en Donde Se Lo OcupaCFPerezNessuna valutazione finora
- Reles de MandoDocumento4 pagineReles de MandoXavier Freire ZamoraNessuna valutazione finora
- Lab3.4 InformeDocumento6 pagineLab3.4 InformeCFPerezNessuna valutazione finora
- Qué Es Un Relé de Protección y en Donde Se Lo OcupaDocumento4 pagineQué Es Un Relé de Protección y en Donde Se Lo OcupaCFPerezNessuna valutazione finora
- Prepa3 2Documento5 paginePrepa3 2CFPerezNessuna valutazione finora
- Upo3 Perez EscobarDocumento5 pagineUpo3 Perez EscobarCFPerezNessuna valutazione finora
- Trabajo Final 2P Embotellado PLC NRC2681 Equipo 6Documento9 pagineTrabajo Final 2P Embotellado PLC NRC2681 Equipo 6CFPerezNessuna valutazione finora
- Qué Es Un Relé de Protección y en Donde Se Lo OcupaDocumento4 pagineQué Es Un Relé de Protección y en Donde Se Lo OcupaCFPerezNessuna valutazione finora
- Qué Es Un Relé de Protección y en Donde Se Lo OcupaDocumento4 pagineQué Es Un Relé de Protección y en Donde Se Lo OcupaCFPerezNessuna valutazione finora
- 2605 Preparatorio2.5 Grupo3 Escobar PerezDocumento8 pagine2605 Preparatorio2.5 Grupo3 Escobar PerezCFPerezNessuna valutazione finora
- Laboratorio 23 SCRs Equipo 6 PLC NRC2681Documento11 pagineLaboratorio 23 SCRs Equipo 6 PLC NRC2681CFPerezNessuna valutazione finora
- Upo 5Documento13 pagineUpo 5Esteban PerezNessuna valutazione finora
- 2605 Tarea1 3 PEREZDocumento5 pagine2605 Tarea1 3 PEREZCFPerezNessuna valutazione finora
- Proyecto Equipofinal PLC 20016 PLC 2681Documento16 pagineProyecto Equipofinal PLC 20016 PLC 2681CFPerezNessuna valutazione finora
- T Are A 1 IndustrialDocumento7 pagineT Are A 1 IndustrialCFPerezNessuna valutazione finora
- Programación KopDocumento15 pagineProgramación Kopedgar7venNessuna valutazione finora
- Laboratorio 33 Transferencia Equipo PLC 2681Documento5 pagineLaboratorio 33 Transferencia Equipo PLC 2681CFPerezNessuna valutazione finora
- Laboratorio 32 GEMMA Equipo 6 PLC NRC 2681Documento14 pagineLaboratorio 32 GEMMA Equipo 6 PLC NRC 2681CFPerezNessuna valutazione finora
- Laboratorio 32 GEMMA Equipo 6 PLC NRC 2681Documento14 pagineLaboratorio 32 GEMMA Equipo 6 PLC NRC 2681CFPerezNessuna valutazione finora
- Laboratorio 33 Transferencia Equipo PLC 2681Documento5 pagineLaboratorio 33 Transferencia Equipo PLC 2681CFPerezNessuna valutazione finora
- Ejercicio 32 Interrupciones Equipo 6 PLC 2681Documento6 pagineEjercicio 32 Interrupciones Equipo 6 PLC 2681CFPerezNessuna valutazione finora
- Caso Pronto PizzaDocumento5 pagineCaso Pronto PizzaKHATHIFINessuna valutazione finora
- Tu CalificaciónDocumento3 pagineTu CalificaciónJose Vasquez0% (2)
- Resumen Teoria Contemporanea de La RestauracionDocumento17 pagineResumen Teoria Contemporanea de La RestauracionDiego Lindo ChumbesNessuna valutazione finora
- MECANICA DE SUELOS INFORME TIENDA, +üLAMO, VER.Documento47 pagineMECANICA DE SUELOS INFORME TIENDA, +üLAMO, VER.Hipolito NinoNessuna valutazione finora
- 1 LPM Sec MatematicasDocumento1 pagina1 LPM Sec Matematicasaime samara muñoz hernandezNessuna valutazione finora
- Evidencia 2 Actividad No. 23Documento10 pagineEvidencia 2 Actividad No. 23Jose Luis Gonzalez100% (3)
- Planeacion Didactica PreescolarDocumento9 paginePlaneacion Didactica PreescolarMass SpinolaNessuna valutazione finora
- 4111 UsoDocumento2 pagine4111 UsoWitchfinder GeneralNessuna valutazione finora
- OsteosintesisDocumento50 pagineOsteosintesisMakita Rodriguez Chavez67% (15)
- Informe Técnico de Mantenimiento Del Desfibrador de Caña AuroraDocumento10 pagineInforme Técnico de Mantenimiento Del Desfibrador de Caña Aurorakelwin hampier hernandez rosasNessuna valutazione finora
- TitulosDocumento2 pagineTitulosAndresz1Nessuna valutazione finora
- Presupuesto Total DPA HUARMEYDocumento104 paginePresupuesto Total DPA HUARMEYMsTerio Elera ContrerasNessuna valutazione finora
- Ensayo Sobre Los Recursos Derecho Procesal Penal 3Documento2 pagineEnsayo Sobre Los Recursos Derecho Procesal Penal 3norman guzmanNessuna valutazione finora
- Reglas Practicas para El Calculo de LimitesDocumento1 paginaReglas Practicas para El Calculo de LimitesLuis Pilo AceitunoNessuna valutazione finora
- Tarea 1 Anualidades - Barreno FernandaDocumento17 pagineTarea 1 Anualidades - Barreno FernandaFernanda BarrenoNessuna valutazione finora
- Trabajo Colaborativo Fisica Moderna 2Documento11 pagineTrabajo Colaborativo Fisica Moderna 2Erika YuleNessuna valutazione finora
- Rúbrica para Evaluar La Calidad de Apps EducativasDocumento2 pagineRúbrica para Evaluar La Calidad de Apps EducativasRecreo JP IUSANessuna valutazione finora
- Historia Natural de La EnfermedadDocumento1 paginaHistoria Natural de La EnfermedadDulce SandovalNessuna valutazione finora
- Ensayo Procesos ContructivosDocumento10 pagineEnsayo Procesos ContructivosLeonardo TorresNessuna valutazione finora
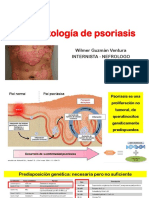
- Fisiopatología de Psoriasis: Wilmer Guzmán Ventura Internista - NefrologoDocumento53 pagineFisiopatología de Psoriasis: Wilmer Guzmán Ventura Internista - NefrologoMonica García Gutierrez100% (2)
- Envases, Empaques, Embalaje, Características y PropiedadesDocumento4 pagineEnvases, Empaques, Embalaje, Características y PropiedadesSALMA ARISAI HERNANDEZ LAZARO100% (1)
- Ensayo Geologia de ColombiaDocumento5 pagineEnsayo Geologia de ColombiaDiana QuintanaNessuna valutazione finora
- CARTA ENCÍCLICA Sobre La EucaristiaDocumento35 pagineCARTA ENCÍCLICA Sobre La EucaristiaJosé IvánNessuna valutazione finora
- Estudio de Caso Clinico 6 Colico BiliarDocumento7 pagineEstudio de Caso Clinico 6 Colico BiliarKatt SologurenNessuna valutazione finora
- Balance Metalurgico Paso A PasoDocumento19 pagineBalance Metalurgico Paso A PasoArmando Tacza82% (49)
- Actividad 16 Evidencia 2 Matriz de RiesgosDocumento22 pagineActividad 16 Evidencia 2 Matriz de RiesgosNelson PrinsNessuna valutazione finora
- Practica ConteoDocumento14 paginePractica ConteoJavierPeraltaNessuna valutazione finora
- Caso Clinico 10Documento5 pagineCaso Clinico 10Gian Franco LeivaNessuna valutazione finora
- Psiquiatria Forense. Generalidades1Documento6 paginePsiquiatria Forense. Generalidades1Jose Ignacio Lopez GarciaNessuna valutazione finora
- A1 JldejDocumento15 pagineA1 JldejCesazarth CasluNessuna valutazione finora