Potrebbero piacerti anche
- Design of ChainDocumento9 pagineDesign of ChainArun Pravin APNessuna valutazione finora
- Mod-3. Spur GearDocumento18 pagineMod-3. Spur GearSharthak GhoshNessuna valutazione finora
- 2 - 3 Involute Spur Gear 1Documento13 pagine2 - 3 Involute Spur Gear 1jiteshpaul100% (1)
- Problem Set 8-Chapter 17 - Shafts-Selected ProblemsDocumento33 pagineProblem Set 8-Chapter 17 - Shafts-Selected Problemssainath_840% (1)
- Tutorial Sheet No 1 On Spur GearDocumento3 pagineTutorial Sheet No 1 On Spur GearChirayuNessuna valutazione finora
- Design and Study of Helical Gears2Documento24 pagineDesign and Study of Helical Gears2AmjathNessuna valutazione finora
- 075 Rolling Contact Bearing 1,2Documento4 pagine075 Rolling Contact Bearing 1,2rip111176100% (1)
- Belt Tension Steady State CalculationDocumento1 paginaBelt Tension Steady State CalculationMary Antoinette C. MadoloraNessuna valutazione finora
- Ball BRG Chapeter-JBK DasDocumento26 pagineBall BRG Chapeter-JBK DasNaresh Kini50% (2)
- Gear Train ProblemsDocumento3 pagineGear Train ProblemsM PervaizNessuna valutazione finora
- Worm GearsDocumento33 pagineWorm GearsRohan SinghNessuna valutazione finora
- Design of Transmission System Unit IIIDocumento57 pagineDesign of Transmission System Unit IIIRaj MohanNessuna valutazione finora
- Assignment 3Documento20 pagineAssignment 3Siddhesh RaulNessuna valutazione finora
- 2 Chain DrivesDocumento35 pagine2 Chain DrivesMohammad UmairNessuna valutazione finora
- Design ProblemsDocumento13 pagineDesign ProblemsAristotle RiveraNessuna valutazione finora
- Rolling Contact BearingDocumento29 pagineRolling Contact BearingBimlendra RayNessuna valutazione finora
- Chapter02 PDFDocumento74 pagineChapter02 PDFedis666100% (3)
- Exercises Problem On Spur Gear Force Analysis: Module 2: Activity No. 5Documento1 paginaExercises Problem On Spur Gear Force Analysis: Module 2: Activity No. 5Ariel GamboaNessuna valutazione finora
- SolutionsofGears PDFDocumento4 pagineSolutionsofGears PDFGautam AdhikariNessuna valutazione finora
- Me6503 Dme Unit 5 Study Notes 2015Documento25 pagineMe6503 Dme Unit 5 Study Notes 2015Bala MuruganNessuna valutazione finora
- Rolling Contact BearingsDocumento37 pagineRolling Contact BearingsErik BaltssNessuna valutazione finora
- Problems On Testing and Performance of IceDocumento5 pagineProblems On Testing and Performance of Iceasjdkfjskaldjf;klasdfNessuna valutazione finora
- GearsDocumento15 pagineGearsAvinandan SandilyaNessuna valutazione finora
- Design of Helical GearsDocumento10 pagineDesign of Helical GearsKarthik SNessuna valutazione finora
- Design Considerations For A Gear DriveDocumento17 pagineDesign Considerations For A Gear Driveمحمدفیضان چوہدریNessuna valutazione finora
- 2 Flywheel PDFDocumento10 pagine2 Flywheel PDFMohammed Safuvan KazhungilNessuna valutazione finora
- Bevel GearsDocumento12 pagineBevel GearsJason Dequin VillarosaNessuna valutazione finora
- Examples That Required For Clutch TopicDocumento6 pagineExamples That Required For Clutch TopicDrhaider Khazal100% (1)
- Helical GearDocumento7 pagineHelical GearDeepak AgrawalNessuna valutazione finora
- Rolling Contact BearingsDocumento11 pagineRolling Contact BearingsritNessuna valutazione finora
- Module 1 - Activity No. 1 (Prelim)Documento2 pagineModule 1 - Activity No. 1 (Prelim)Leyzer MalumayNessuna valutazione finora
- P 20 KW N N: 600 RPM 200rpmDocumento4 pagineP 20 KW N N: 600 RPM 200rpmGreg FelizartaNessuna valutazione finora
- Md-16 Clutches and Brakes PDFDocumento7 pagineMd-16 Clutches and Brakes PDFM.ThirunavukkarasuNessuna valutazione finora
- Chain RollerDocumento9 pagineChain Rolleradn1987Nessuna valutazione finora
- c4 Tutorial TurbineDocumento2 paginec4 Tutorial TurbinehahahaNessuna valutazione finora
- Solved Examples For Spur Gear DesignDocumento1 paginaSolved Examples For Spur Gear Designpawan12340% (1)
- Machinery's Handbook 27th Edition: Machining OperationsDocumento4 pagineMachinery's Handbook 27th Edition: Machining OperationsOmkar KshirsagarNessuna valutazione finora
- Spring DesignDocumento18 pagineSpring DesignShatendra Sahu100% (1)
- Belt, Rope and Chain Drives Denition: M Arshad Zahangir ChowdhuryDocumento12 pagineBelt, Rope and Chain Drives Denition: M Arshad Zahangir ChowdhuryMelindaNessuna valutazione finora
- Handouts Prepared by Engr. Bernardo: Machine Design 1Documento9 pagineHandouts Prepared by Engr. Bernardo: Machine Design 1Kenn Earl Bringino VillanuevaNessuna valutazione finora
- Bearing ProblemsDocumento16 pagineBearing ProblemsRohit GhulanavarNessuna valutazione finora
- Solved: A Journal Bearing Has A Shaft Diameter of 75.00 MM With... - PDFDocumento6 pagineSolved: A Journal Bearing Has A Shaft Diameter of 75.00 MM With... - PDFAlberto Icazatti100% (2)
- Cost and Performance Characteristics of New Generating Technologies, AnnualDocumento4 pagineCost and Performance Characteristics of New Generating Technologies, AnnualKamil M. AhmedNessuna valutazione finora
- Helical GearsDocumento12 pagineHelical Gearsgamini ranaweera100% (1)
- Me 463-Machine Design 2: Instructor: Engr. Danielle D. Cabana, MengDocumento21 pagineMe 463-Machine Design 2: Instructor: Engr. Danielle D. Cabana, MengChristian Breth BurgosNessuna valutazione finora
- Unit 4 Power TransmissionDocumento92 pagineUnit 4 Power TransmissionMohit BagurNessuna valutazione finora
- 76-3-Bevel GearDocumento12 pagine76-3-Bevel Gearrip111176Nessuna valutazione finora
- Md-14 Belt and Chain DrivesDocumento8 pagineMd-14 Belt and Chain DrivesRemartin MaglantayNessuna valutazione finora
- 77-4 Worm GearDocumento9 pagine77-4 Worm Gearrip111176Nessuna valutazione finora
- A1. Examples: Belt Drives Examples and WorksheetDocumento3 pagineA1. Examples: Belt Drives Examples and WorksheetAb_AlizadehNessuna valutazione finora
- Belt Drives: Geometry Specification ConstructionDocumento17 pagineBelt Drives: Geometry Specification ConstructionBalen Karim0% (1)
- Mechanics Tutorial - ClutchesDocumento0 pagineMechanics Tutorial - ClutchesBen JohnsonNessuna valutazione finora
- Calculo Flecha TerminadoDocumento149 pagineCalculo Flecha TerminadoSebastián ValenciaNessuna valutazione finora
- Mechanism DesignDocumento6 pagineMechanism DesignAsim AshrafNessuna valutazione finora
- INTRODUCTIONDocumento24 pagineINTRODUCTIONnaveeen chackoNessuna valutazione finora
- DTS - Unit - 2 PDFDocumento14 pagineDTS - Unit - 2 PDFmani100% (1)
- V-Belt DriveDocumento9 pagineV-Belt DriveCHANDRASEKARANNessuna valutazione finora
- Design and Analysis of A Sprocket-Hub AssemblyDocumento7 pagineDesign and Analysis of A Sprocket-Hub AssemblyJackson PhinniNessuna valutazione finora
- Estrella, Tria A. BSME 5-1 ME 511a Machine Design 1 Exercise #1: Nature of Mechanical DesignDocumento12 pagineEstrella, Tria A. BSME 5-1 ME 511a Machine Design 1 Exercise #1: Nature of Mechanical DesignHannahNessuna valutazione finora
- Overhaul BrakesDocumento50 pagineOverhaul BrakesjovenalNessuna valutazione finora
- Form Checklist Red Inspection CraneDocumento7 pagineForm Checklist Red Inspection CraneJoeArdjoNessuna valutazione finora
- 1983 Subaru EA81Documento853 pagine1983 Subaru EA81Seth J. Kingry100% (6)
- 10198-Kubota - KH-191 - EPC 2Documento391 pagine10198-Kubota - KH-191 - EPC 2Jade Lavoie0% (1)
- Purchase ListDocumento3 paginePurchase Listjunhui100% (1)
- RTA-37.1 Reconditioning of Piston RodsDocumento11 pagineRTA-37.1 Reconditioning of Piston RodsCatalin CataNessuna valutazione finora
- PG 306-328 PDFDocumento23 paginePG 306-328 PDFfilkeNessuna valutazione finora
- Rokon-Manual 2015 Rev-7Documento61 pagineRokon-Manual 2015 Rev-7Ryan's Snuff and StuffNessuna valutazione finora
- Right Angle Reduction Gears PDC Series in Line Reduction Gears PDL SeriesDocumento2 pagineRight Angle Reduction Gears PDC Series in Line Reduction Gears PDL SeriesMarcelo Walesko de MacedoNessuna valutazione finora
- All-Terrain Crane AT-Kran Grue Tout Terrain Grúa Todo TerrenoDocumento30 pagineAll-Terrain Crane AT-Kran Grue Tout Terrain Grúa Todo TerrenoMatias CarrizoNessuna valutazione finora
- MOTOMAN MA1440 Grease InfoDocumento14 pagineMOTOMAN MA1440 Grease InfoAndrés M. ReyesNessuna valutazione finora
- VW Passat B6 2005 - Steering, Torque SpecificationsDocumento1 paginaVW Passat B6 2005 - Steering, Torque SpecificationsNPNessuna valutazione finora
- Yanmar Marine Diesel Engine 2QM20H 3QM30H Service ManualDocumento349 pagineYanmar Marine Diesel Engine 2QM20H 3QM30H Service ManualPer ForsbergNessuna valutazione finora
- Barnetts Manual 5th Ed 133-136Documento4 pagineBarnetts Manual 5th Ed 133-136Noneed sullyNessuna valutazione finora
- BcksDocumento1 paginaBcksBg LecongbaoNessuna valutazione finora
- D3E8034DF5E Gearbox 09GDocumento216 pagineD3E8034DF5E Gearbox 09GVasile-Cristian Rusu50% (2)
- EXP-PR-EQ130-R0-EN Support CoursDocumento65 pagineEXP-PR-EQ130-R0-EN Support Courshedi100% (1)
- Fisher GX Control Valve and Actuator System: Scope of ManualDocumento44 pagineFisher GX Control Valve and Actuator System: Scope of ManualSaasiNessuna valutazione finora
- Shift Interlock SystemDocumento10 pagineShift Interlock SystemMartin FilionNessuna valutazione finora
- Manual-Book-Kijang-Inova-Diesel (Google Tranlated Indonesian To English)Documento508 pagineManual-Book-Kijang-Inova-Diesel (Google Tranlated Indonesian To English)Orly Palomar Jr.100% (4)
- IEC Motor Data CalculatorDocumento6 pagineIEC Motor Data Calculatorsabill arasyidNessuna valutazione finora
- Spare Parts & Tools: Wheels / Ruote / RouesDocumento42 pagineSpare Parts & Tools: Wheels / Ruote / RouesjosskriptiNessuna valutazione finora
- Eaton Fuller RTX 14715Documento43 pagineEaton Fuller RTX 14715Mauricio DuranNessuna valutazione finora
- 019 - 137370 - Oms My20 Caad13 - en PDFDocumento24 pagine019 - 137370 - Oms My20 Caad13 - en PDFDarko AndreevskiNessuna valutazione finora
- CAT 3126E Disassembly&AssemblyDocumento120 pagineCAT 3126E Disassembly&AssemblyMatíasNessuna valutazione finora
- SY215Documento328 pagineSY215Weverton Pereira Alves100% (1)
- Worms Worm Gears-Formulas Self Locking PDFDocumento1 paginaWorms Worm Gears-Formulas Self Locking PDFalexdisu4510Nessuna valutazione finora
- Fichas Tecnicas Compresor 15T2 IrDocumento12 pagineFichas Tecnicas Compresor 15T2 IrPablo Andres Espin MartinNessuna valutazione finora
- Terrano 6.4 GX Parts Catalog 2018Documento94 pagineTerrano 6.4 GX Parts Catalog 2018Juli PNessuna valutazione finora
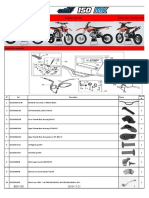
- Bigy 150MX - 2019Documento25 pagineBigy 150MX - 2019Kamila KNessuna valutazione finora