Potrebbero piacerti anche
- A-level Maths Revision: Cheeky Revision ShortcutsDa EverandA-level Maths Revision: Cheeky Revision ShortcutsValutazione: 3.5 su 5 stelle3.5/5 (8)
- Book BindingDocumento14 pagineBook Bindingpesticu100% (2)
- ST 36Documento4 pagineST 36ray72roNessuna valutazione finora
- Illuminati TruthsDocumento27 pagineIlluminati TruthsDonnaveo ShermanNessuna valutazione finora
- Killer Kohler Part I IDocumento17 pagineKiller Kohler Part I Irusyn100% (1)
- 40 RT-flex Control-System Rev01Documento68 pagine40 RT-flex Control-System Rev01Mayvon Botelho100% (2)
- WQU Econometrics M3 Compiled Content PDFDocumento44 pagineWQU Econometrics M3 Compiled Content PDFNarayani PandeyNessuna valutazione finora
- Sample Dilapidation ReportDocumento8 pagineSample Dilapidation ReportczarusNessuna valutazione finora
- Method Statement For Cable Trays & Cable Ladders InstallationDocumento7 pagineMethod Statement For Cable Trays & Cable Ladders InstallationJamal Budeiri0% (1)
- Meet The Profesor 2021Documento398 pagineMeet The Profesor 2021Raúl AssadNessuna valutazione finora
- PEDocumento12 paginePEMae Ann Base RicafortNessuna valutazione finora
- Image Processing On FPGA Using Verilog HDL - FPGA4studentDocumento16 pagineImage Processing On FPGA Using Verilog HDL - FPGA4studentgottdammer100% (1)
- Biomediacal Waste Project FinalDocumento43 pagineBiomediacal Waste Project Finalashoknr100% (1)
- LAB 11 - Design of Discrete-Time IIR Filters - IDocumento8 pagineLAB 11 - Design of Discrete-Time IIR Filters - IM Hassan BashirNessuna valutazione finora
- Assignment 1Documento3 pagineAssignment 1dharmNessuna valutazione finora
- EovermreportDocumento7 pagineEovermreportapi-702743009Nessuna valutazione finora
- Module Force VibrationDocumento6 pagineModule Force VibrationAlamsyah AkbarNessuna valutazione finora
- Chapter 4Documento21 pagineChapter 4Olorato RantabaNessuna valutazione finora
- Lab#1 Sampling and Quantization Objectives:: Communication II Lab (EELE 4170)Documento6 pagineLab#1 Sampling and Quantization Objectives:: Communication II Lab (EELE 4170)MarteNessuna valutazione finora
- Lab ReportDocumento9 pagineLab ReportArslan Mir100% (1)
- LAB 9 - Multirate SamplingDocumento8 pagineLAB 9 - Multirate SamplingM Hassan BashirNessuna valutazione finora
- REPORTDocumento6 pagineREPORTEnes sağnakNessuna valutazione finora
- Panel VARDocumento29 paginePanel VARsalihuNessuna valutazione finora
- Time of Flight BasicsDocumento14 pagineTime of Flight BasicsPirvu CristiNessuna valutazione finora
- 1 - WQU - CTSP - M1 - Compiled - ContentDocumento35 pagine1 - WQU - CTSP - M1 - Compiled - ContentJoe Ng100% (1)
- Sheet 3Documento5 pagineSheet 3oumar fadilNessuna valutazione finora
- EERI213 2018 Prakties3 Piek JP 28784286 Rev01 PDFDocumento14 pagineEERI213 2018 Prakties3 Piek JP 28784286 Rev01 PDFHannes PiekNessuna valutazione finora
- Correlation Spectral Density AM Aug 10Documento8 pagineCorrelation Spectral Density AM Aug 10vishal kumarNessuna valutazione finora
- Signals and Systems: DR Tania StathakiDocumento20 pagineSignals and Systems: DR Tania StathakikentNessuna valutazione finora
- Name: Aditya A P Roll Number: M180056ME Guide: Dr. Ghulam Jilani, Dr. Simon PeterDocumento5 pagineName: Aditya A P Roll Number: M180056ME Guide: Dr. Ghulam Jilani, Dr. Simon PeterAjaratanNessuna valutazione finora
- Kelompok 3 - Tugas 6 - TRK2-03-dikonversiDocumento30 pagineKelompok 3 - Tugas 6 - TRK2-03-dikonversiMuhammad AzharNessuna valutazione finora
- Vyboldin - 2019 - J. - Phys. - Conf. - Ser. - 1384 - 012069 PDFDocumento6 pagineVyboldin - 2019 - J. - Phys. - Conf. - Ser. - 1384 - 012069 PDFY.VyboldinNessuna valutazione finora
- Mod 8 - Lecture 1Documento24 pagineMod 8 - Lecture 1lvrevathiNessuna valutazione finora
- Crystallography: ExperimentDocumento13 pagineCrystallography: ExperimentommNessuna valutazione finora
- Exp 5-7Documento10 pagineExp 5-7abdul rehmanNessuna valutazione finora
- r10942024 THW HW2Documento6 paginer10942024 THW HW2陳嘉佑Nessuna valutazione finora
- EE531 Practice Questions - Nov 16, 2015Documento9 pagineEE531 Practice Questions - Nov 16, 2015ThiyaguDhanam MohansriRithubaranNessuna valutazione finora
- Quantum Algorithm For Approximating Maximum Independent SetsDocumento12 pagineQuantum Algorithm For Approximating Maximum Independent Setswubiao.physNessuna valutazione finora
- Adv Lab OscillatorsDocumento12 pagineAdv Lab OscillatorsPeter John BolgertNessuna valutazione finora
- 1.+ENEE+3309+Hashlamoun+Project+Fall 22 23Documento1 pagina1.+ENEE+3309+Hashlamoun+Project+Fall 22 23عبدالرحمن عطاريNessuna valutazione finora
- Application Note: Time-Of-Flight BasicsDocumento15 pagineApplication Note: Time-Of-Flight BasicsZhicheng1 YANGNessuna valutazione finora
- Unit 4Documento10 pagineUnit 4GurunathanNessuna valutazione finora
- SP LAB Experiment ManualDocumento69 pagineSP LAB Experiment ManualChemGuyNessuna valutazione finora
- Digital Electronics 1 2022 Test 3 MemoDocumento8 pagineDigital Electronics 1 2022 Test 3 MemoSakhile Nhlakanipho ZithaNessuna valutazione finora
- Gradient Of A Function هّلادلا رادحنإDocumento11 pagineGradient Of A Function هّلادلا رادحنإGafeer FableNessuna valutazione finora
- General Physics Laboratory Fall 18-19: Experiment 4 - Conservation of Linear MomentumDocumento4 pagineGeneral Physics Laboratory Fall 18-19: Experiment 4 - Conservation of Linear MomentumJasmine ANessuna valutazione finora
- 872-892 Chapter 11Documento26 pagine872-892 Chapter 11kahinaNessuna valutazione finora
- Bootstrap CI For ReturnDocumento2 pagineBootstrap CI For ReturnHemangi KulkarniNessuna valutazione finora
- Practice 2. Gic: Direccion@ece - Buap.mxDocumento4 paginePractice 2. Gic: Direccion@ece - Buap.mxJose Juan MendozaNessuna valutazione finora
- PBL2 Op-AmpDocumento11 paginePBL2 Op-AmpMinh Ánh TrầnNessuna valutazione finora
- Sampling Process and TheoremsDocumento15 pagineSampling Process and TheoremsIzzat AzmanNessuna valutazione finora
- Reliability Theory and Survival Analysis FinalDocumento12 pagineReliability Theory and Survival Analysis FinalAyushi jainNessuna valutazione finora
- r10942024SI hw1Documento9 paginer10942024SI hw1陳嘉佑Nessuna valutazione finora
- Chapter Seven: Solution of Pdes. by Using Finite Difference Method 7.1 Partial Differential EquationsDocumento10 pagineChapter Seven: Solution of Pdes. by Using Finite Difference Method 7.1 Partial Differential EquationsMohamed MuayidNessuna valutazione finora
- Statistical PhysicsDocumento7 pagineStatistical Physicsst stNessuna valutazione finora
- Lecture 23Documento22 pagineLecture 23Dinuja SenevirathneNessuna valutazione finora
- 1.2 Basic Digital Control System: Input To A Controlled SystemDocumento22 pagine1.2 Basic Digital Control System: Input To A Controlled Systemwondi BETNessuna valutazione finora
- A. Course Reader Lecture NotesDocumento177 pagineA. Course Reader Lecture Noteszhitao wangNessuna valutazione finora
- Chapter 8 - Granger - Causality - Among - Graphs - 4Documento5 pagineChapter 8 - Granger - Causality - Among - Graphs - 4Lídia de JesusNessuna valutazione finora
- University of Limpopo: MemorandumDocumento6 pagineUniversity of Limpopo: MemorandumNtokozo MasemulaNessuna valutazione finora
- STD DevDocumento5 pagineSTD DevAhmar AliNessuna valutazione finora
- F 11 Place 2Documento8 pagineF 11 Place 2paimoNessuna valutazione finora
- Lecture 23 Ece4330tDocumento58 pagineLecture 23 Ece4330tmanse yukiNessuna valutazione finora
- S9-P5 Mrabti PaperDocumento10 pagineS9-P5 Mrabti PaperGhita ZazNessuna valutazione finora
- Time of Flight Basics Application Note MelexisDocumento14 pagineTime of Flight Basics Application Note MelexisPhạm GiangNessuna valutazione finora
- F10place2 SolnDocumento6 pagineF10place2 SolnpaimoNessuna valutazione finora
- Particulate Morphology: Mathematics Applied to Particle AssembliesDa EverandParticulate Morphology: Mathematics Applied to Particle AssembliesNessuna valutazione finora
- Seminar on Micro-Local Analysis. (AM-93), Volume 93Da EverandSeminar on Micro-Local Analysis. (AM-93), Volume 93Nessuna valutazione finora
- Agilent Cesio - Rs232 Monitoreo - USNODocumento11 pagineAgilent Cesio - Rs232 Monitoreo - USNOgottdammerNessuna valutazione finora
- Allanvar PDFDocumento12 pagineAllanvar PDFgottdammerNessuna valutazione finora
- Unifi Questions Extract From Ubiquiti ForumDocumento7 pagineUnifi Questions Extract From Ubiquiti ForumHassan Funsho AkandeNessuna valutazione finora
- Agilent Cesio - Rs232 Monitoreo - USNODocumento11 pagineAgilent Cesio - Rs232 Monitoreo - USNOgottdammerNessuna valutazione finora
- Ionic Ebook - Hybrid Vs Native PDFDocumento25 pagineIonic Ebook - Hybrid Vs Native PDFgottdammerNessuna valutazione finora
- Failure Trends in Hard DrivesDocumento13 pagineFailure Trends in Hard DrivesDean FooteNessuna valutazione finora
- Formalizing and Enhancing VerilogDocumento4 pagineFormalizing and Enhancing VeriloggottdammerNessuna valutazione finora
- Raptor Oop Mode DrakeDocumento13 pagineRaptor Oop Mode DrakeMan DrakeNessuna valutazione finora
- Verilog TutorialDocumento3 pagineVerilog TutorialgottdammerNessuna valutazione finora
- BaculaDocumento24 pagineBaculabfmanfrediniNessuna valutazione finora
- Console BaculaDocumento25 pagineConsole BaculagottdammerNessuna valutazione finora
- LM78S40 SMPSDocumento10 pagineLM78S40 SMPSgottdammerNessuna valutazione finora
- Interaction Among Agents That Plan: Felipe Rech Meneguzzi Michael LuckDocumento8 pagineInteraction Among Agents That Plan: Felipe Rech Meneguzzi Michael LuckgottdammerNessuna valutazione finora
- Energy Transfer in Cell During Exercise and Oxygen Metabolism and Transport - PalakDocumento85 pagineEnergy Transfer in Cell During Exercise and Oxygen Metabolism and Transport - Palakpalooo4Nessuna valutazione finora
- Monkeys PawDocumento4 pagineMonkeys PawKaitlin HartmanNessuna valutazione finora
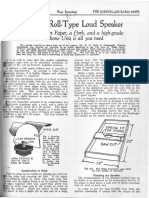
- Simple Roll-Type: A Loud SpeakerDocumento1 paginaSimple Roll-Type: A Loud SpeakerEudes SilvaNessuna valutazione finora
- Updated SAP Cards Requirement JalchdDocumento51 pagineUpdated SAP Cards Requirement Jalchdapi-3804296Nessuna valutazione finora
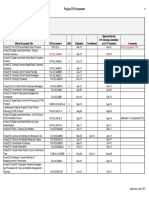
- Approved Project 25 StandardsDocumento5 pagineApproved Project 25 StandardsepidavriosNessuna valutazione finora
- PTP S3Documento8 paginePTP S3Yongyin SHENGNessuna valutazione finora
- (Eng) Zx890lch 5a Ks En316Documento13 pagine(Eng) Zx890lch 5a Ks En316MC TAK LEENessuna valutazione finora
- 7 +Royal+Court+Affairs,+Sultanate+of+OmanDocumento12 pagine7 +Royal+Court+Affairs,+Sultanate+of+OmanElencheliyan PandeeyanNessuna valutazione finora
- Cac de Luyen ThiDocumento18 pagineCac de Luyen ThiVinh Dao CongNessuna valutazione finora
- Arts6,4, Week2, Module 2V4Documento24 pagineArts6,4, Week2, Module 2V4Loreen Pearl MarlaNessuna valutazione finora
- Properties of Matter ReviewDocumento8 pagineProperties of Matter Reviewapi-290100812Nessuna valutazione finora
- ELIDA Products CatalogueDocumento37 pagineELIDA Products CatalogueAbhishek AgarwalNessuna valutazione finora
- St. John's Wort: Clinical OverviewDocumento14 pagineSt. John's Wort: Clinical OverviewTrismegisteNessuna valutazione finora
- Comparative Performance of Some Cattle Breeds Under Barani Conditions of PakistanDocumento4 pagineComparative Performance of Some Cattle Breeds Under Barani Conditions of PakistanMasood HassanNessuna valutazione finora
- Psychology 114: Chapters 3 & 4Documento18 paginePsychology 114: Chapters 3 & 4Grace AndersonNessuna valutazione finora
- 9701 w09 QP 21Documento12 pagine9701 w09 QP 21Hubbak KhanNessuna valutazione finora
- Aesculap Saw GD307 - Service ManualDocumento16 pagineAesculap Saw GD307 - Service ManualFredi PançiNessuna valutazione finora
- iPQ-Center Webvideo Star TTB MA R1 42 en PDFDocumento32 pagineiPQ-Center Webvideo Star TTB MA R1 42 en PDFHamid KharazmiNessuna valutazione finora
- Serving North Central Idaho & Southeastern WashingtonDocumento12 pagineServing North Central Idaho & Southeastern WashingtonDavid Arndt100% (3)